考虑工况和驾驶风格耦合影响的插电式混合动力汽车制动能量回收策略
2022-01-27邱明明曹龙凯
邱明明 虞 伟 赵 韩 刘 浩 曹龙凯
1.合肥工业大学机械工程学院,合肥,2300092.汽车技术与装备国家地方联合工程研究中心,合肥,230009
0 引言
制动能量回收是混合动力汽车能量管理的重要组成部分,其本质是根据工况和驾驶员的驾驶意图来确定制动能量回收强度,并在此基础上根据电机动态特性进行优化,从而实现能量回收的最大化[1]。
国内外学者对制动能量回收进行了大量研究。PAUL等[2]基于模糊逻辑估计轮胎-路面摩擦因数的方法,提出了一种单电机四轮驱动汽车的制动力分配策略。XIONG等[3]基于电机损耗模型和数据计算,建立了优化电机制动力矩分布模型,揭示了前后电动机构功率优化的分布规律。XIAO等[4]考虑电池充电状态、制动强度和电机转速的影响,提出了一种基于多输入模糊控制逻辑的再生制动分配策略。XU等[5]基于模型预测控制理论,设计了模型预测控制器并验证了其优越性。WANG等[6]研究了多目标、多约束条件下制动力的优化分配方法,提高了制动模式切换时的制动稳定性。郭志军等[7]通过分析制动力安全分配区域,提出了一种再生制动模糊控制策略。郭金刚等[8]制定了包含制动力分配和最优制动强度控制的再生制动能量回收最优控制策略,实现了制动单次工况能量回收率最优。严运兵等[9]通过合理分配前后轴上机械制动力与电机制动力的比例,达到提高能量回收率的目的。王虎[10]根据制动强度将制动情况分成四种类型并给出了每种类型所需的制动力,改善了能量回收的效果。武苏杭等[11]将制动模式按车速和制动意图分为六种模式,建立了基于安全修正系数的制动能量回收策略。李胜琴等[12]依据不同制动强度设计电机的再生制动力与前轴制动力的分配比例,有效地增加了电动汽车的续航里程。姜涛等[13]提出以前后电机总损失功率为目标函数的转矩分配系数计算方法,明显减少了能量消耗。黄文强等[14]通过改变制动速度来改变制动功率,进而减少了制动电阻上的功率消耗,提高了超级电容的回收能量。鲁楠等[15]通过建立优化目标和转矩分配的博弈模型,构造制动转矩分配问题的多目标优化代价函数,实现了制动力矩的合理分配并延长了电池的使用寿命。
综上所述,虽然目前关于制动能量回收的研究已取得丰硕的成果,但多数只考虑了驾驶员、工况或电机效率等单一因素,未考虑多因素耦合的影响,制动能量回收的效果未达最佳,因此,研究多因素耦合影响下的制动能量回收方法十分必要。
本文首先利用实验平台对车速、踏板等信号进行采集,并对工况和驾驶风格特征参数进行计算;然后考虑工况和驾驶风格对制动能量回收的耦合影响,引入工况修正因子α和驾驶风格修正因子β对电机实际提供的制动力进行修正,并通过正态分布与t分布的统计方法确定α和β的变化范围;进一步,建立工况和驾驶风格学习向量量化(learning vector quantization,LVQ)神经网络,并根据工况和驾驶风格的识别结果建立制动能量回收策略;最后,建立车辆仿真模型,针对不同工况对本文所制定的能量回收策略的有效性进行对比验证。
1 工况和驾驶风格数据采集
本文通过驾驶员在环实验获取工况和驾驶风格的数据。模拟驾驶实验平台如图1所示,实时采集制动、油门踏板和车速数据。

图1 驾驶员在环实验平台Fig.1 Driver-in-loop experiment platform
实验选取城市循环道路工况,道路的拥堵情况通过模拟平台的3D Instructor 2软件进行设置,分别设置畅通工况(Straightway)、中速工况(Med-Speed)、低速工况(Low-Speed)和拥堵工况(Congestion)四种,在这四种工况下对44位驾驶员进行驾驶员在环实验,在进行实验之前已对该44位驾驶员的日常驾驶行为数据进行采集和分析,根据参与实验的44位驾驶员平时的驾驶特点将其分为谨慎型(Calm)、稳健型(Normal)和激进型(Aggressive)三组(其中,谨慎型14名,稳健型20名,激进型10名),分别采集加速踏板行程、制动踏板行程和车速等数据,共采集有效数据176组。
为表征不同拥堵工况类型,本文选取了12个特征参数,经过分析计算,获得每组数据工况特征参数值,如表1所示。

表1 工况特征参数
同一类驾驶风格在不同工况下会表现出不同特征,为此,需要对不同工况下的驾驶风格特征参数进行分析。事先分组的驾驶员在四种不同工况下进行在环实验,选取17个特征参数来表征驾驶风格,经过分析计算获得不同工况下不同驾驶风格的特征参数取值,如表2所示。
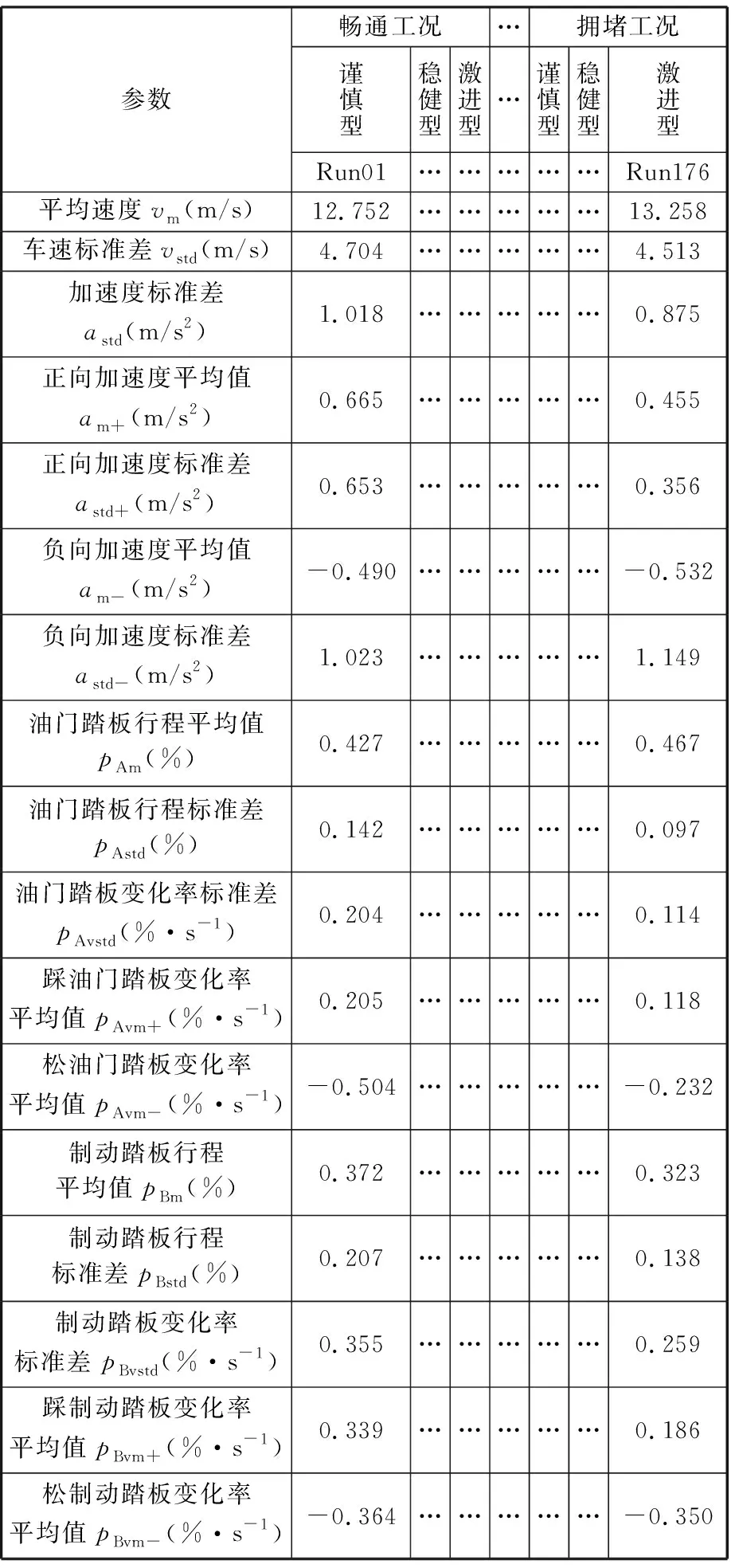
表2 驾驶风格特征参数
2 最大再生制动力修正因子
当电机参与车辆制动时,为了保证车辆制动时的稳定性,需要限制电机实际提供的制动力,因此,本文考虑工况和驾驶风格对车辆制动稳定性的影响,将不同工况下电机实际提供的最大制动力与电机所能提供的最大制动力的比值定义为工况修正因子α,计算公式为
(1)
式中,Fmax,c为对应工况下实际最大制动力;Fmax为电机能够提供的最大制动力。
将不同驾驶风格下实际最大制动力与对应工况下实际制动力算术平均值的比值定义为驾驶风格修正因子βij(i=1,2,3,4;j=1,2,3),下标i分别表示拥堵工况、低速工况、中速工况以及畅通工况,下标j分别表示谨慎型、稳健型、激进型驾驶风格。驾驶风格修正因子β的计算公式为
(2)
Fc=(Fmax+Fmin)/2
(3)
式中,Fc为对应工况下实际制动力的算术平均值;Fmin为对应工况下实际制动力的最小值;Fmax,lim为根据工况和驾驶风格修正后的实际最大制动力。
2.1 工况修正因子
平均速度能够在一定程度上反映工况的拥堵程度,如拥堵程度相对较高的工况则平均速度相对较小,因此,本文通过统计四种工况平均速度的区间来确定工况修正因子α的范围。由于四种工况的数据量较大,且对数据进行KS检验后发现满足正态分布规律,因此使用正态分布的统计方法对平均速度进行分析,进而通过标准化方法确定工况修正因子α的范围。拥堵程度越高的工况越应注重其制动稳定性,故其实际最大制动力应越小。因此,标准化原则为:工况的拥堵程度越高,则α的取值越小,在本文中越接近0。具体步骤如图2所示。
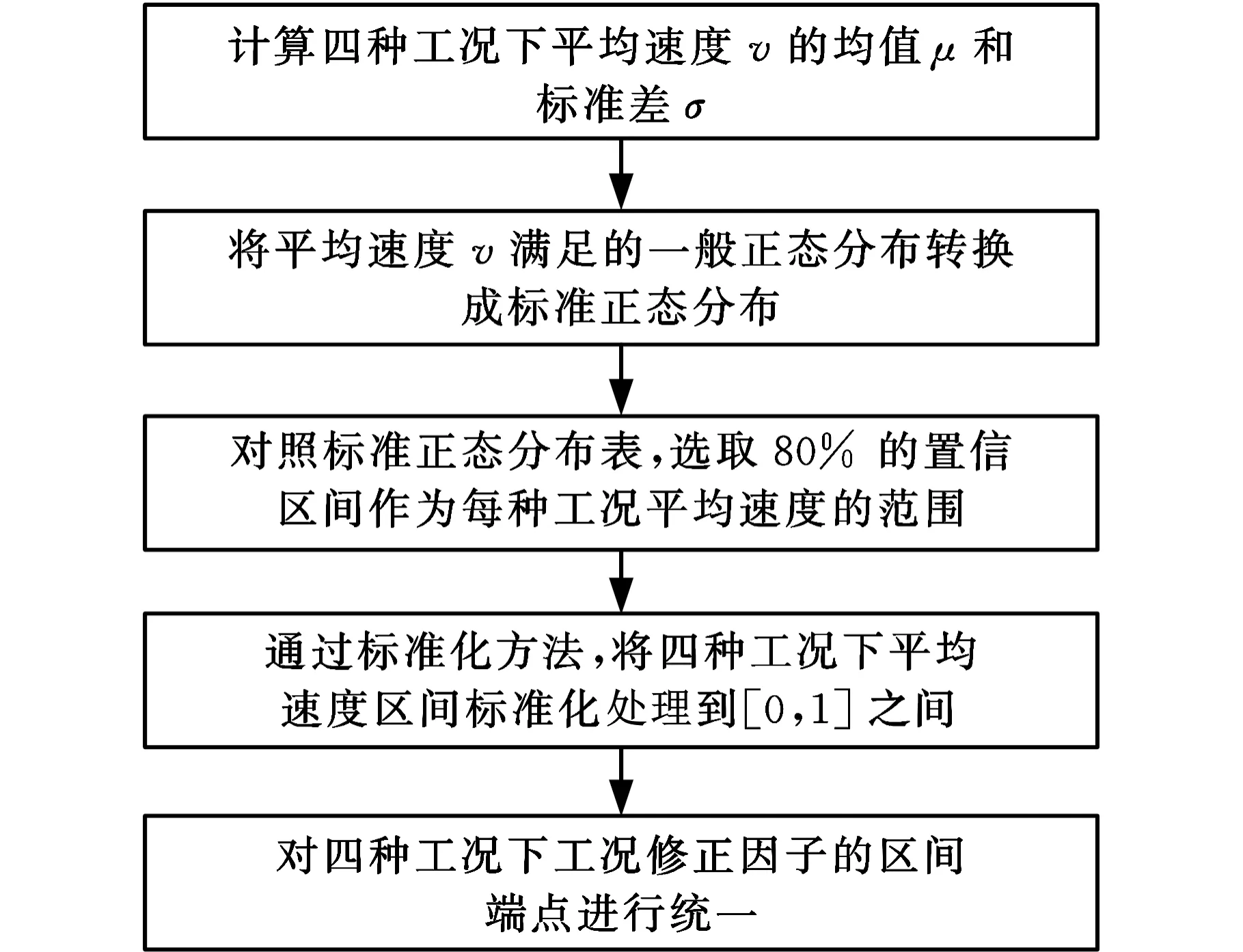
图2 工况修正因子确定步骤Fig.2 Calculation procedure of the driving cyclecorrection factors
根据图2所示步骤,四种工况下工况修正因子的范围为:0<α1<0.22,0.22<α2<0.57,0.57<α3<0.68,0.68<α4<1。其中,αi(i=1,2,3,4)分别表示拥堵工况、低速工况、中速工况以及畅通工况的修正因子。
2.2 驾驶风格修正因子
就同一种工况而言,驾驶风格越激进的驾驶员驾驶车辆时,一个驾驶循环的制动踏板行程的平均值就越大,因此,驾驶风格修正因子可以通过对制动踏板行程平均值的统计来确定。由t分布的性质可知:对少量符合正态分布规律的样本可以考虑采用t分布的统计方法进行统计[16]。因此,本文首先采用t分布对制动踏板行程平均值的数据进行分析,进而通过标准化方法分别确定每种工况下三种驾驶风格修正因子β的范围。驾驶风格越激进,越应注重其制动时的制动稳定性,其电机实际参与的最大制动力应越小。因此,标准化原则为:驾驶风格的激进程度越高,则β的取值越小,在本文中越接近0。具体步骤如图3所示。

图3 驾驶风格修正因子确定步骤Fig.3 Calculation procedure of the driving stylecorrection factors
根据图3所示步骤得到12种驾驶风格修正因子范围:0<β13<0.39,0.39<β12<0.74,0.74<β11<1;0<β23<0.4,0.4<β22<0.64,0.64<β21<1;0<β33<0.4,0.4<β32<0.64,0.64<β31<1;0<β43<0.48,0.48<β42<0.71,0.71<β41<1。βij中的i(i=1,2,3,4)分别对应四种工况,j(j=1,2,3)分别对应三种驾驶风格。
3 制动能量回收策略制定
3.1 工况和驾驶风格识别LVQ神经网络


图4 LVQ神经网络结构Fig.4 LVQ neural network structure
本文取vm、vmax、am+、amax+、amax-、Pa、Pi工况特征参数数据作为训练工况LVQ神经网络的输入;针对每种工况,取驾驶风格特征参数pAvm+、pAvm-、pBm、pBvm+、pBvm-作为训练驾驶风格LVQ神经网络的输入。以50 s为识别周期,首先对工况进行识别,然后在当前识别工况类型下,利用驾驶风格LVQ神经网络识别模型对驾驶风格进行识别。将识别结果传递给制动能量回收策略模型,匹配对应的制动能量回收策略。
3.2 考虑工况和驾驶风格耦合影响的制动能量回收策略
复合制动过程,即有再生制动力参与时,应综合考虑车辆的制动稳定性和能量回收效率[18]。不同的工况和驾驶风格对制动稳定性和能量回收效率有很大影响。由于相同的驾驶风格在不同工况下所表现出的特征参数有很大不同,如同一组驾驶风格特征参数在拥堵工况下表现的是稳健型驾驶风格,而在不需要频繁松踩踏板的畅通工况下表现的可能是激进型驾驶风格,所以,在识别驾驶风格时,需根据不同工况下的驾驶风格特征参数进行识别。因此,本文建立了四种工况下不同驾驶风格的识别模型,制定了基于工况和驾驶风格耦合影响的制动能量回收策略,如图5所示。
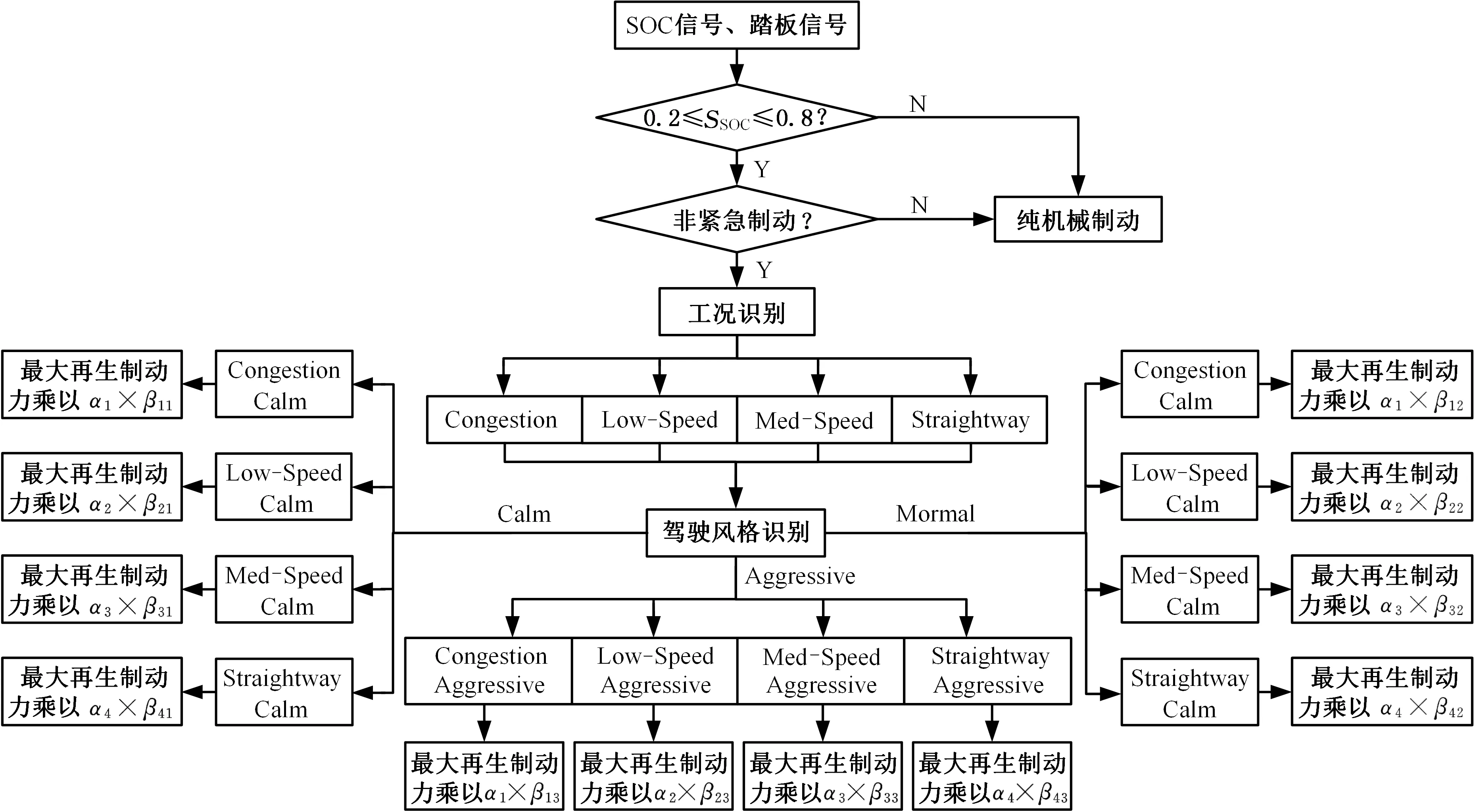
图5 制动能量回收策略流程图Fig.5 Flow chart of braking energy recovery strategy
当车辆制动时,控制系统根据实时电池荷电状态(SOC)信号以及制动强度信号判断是否需要再生制动力参与,将汽车的制动模式分为纯机械制动模式和复合制动模式。
(1)纯机械制动模式。制动过程中,若SOC值SSOC≤0.2或SSOC≥0.8或制动强度z≥0.7时,则所需制动力全部由机械制动力提供。
(2)复合制动模式。若0.2≤SSOC≤0.8且制动强度z<0.7,则制动力由再生制动力和机械制动力共同提供。
本文按工况和驾驶风格识别结果将复合制动模式分为畅通工况谨慎型制动模式、畅通工况稳健型制动模式、畅通工况激进型制动模式、中速工况谨慎型制动模式、中速工况稳健型制动模式、中速工况激进型制动模式、低速工况谨慎型制动模式、低速工况稳健型制动模式、低速工况激进型制动模式、拥堵工况谨慎型制动模式、拥堵工况稳健型制动模式和拥堵工况激进型制动模式共12种制动模式。
当车辆处于复合制动模式时,前后轴制动力的分配如图6所示,其中A点表示依据工况和驾驶风格修正后实际最大制动力。再生制动控制模块接收工况和驾驶风格的识别结果,根据识别结果修正实际最大制动力:
Fmax,lim=Fmaxαβ
(4)

图6 复合制动时前后轴制动力分配Fig.6 Braking force distribution curve of front andrear axles during compound braking
当车辆处于图6中的制动阶段1时,制动所需的全部制动力小于修正后电机实际提供的最大制动力,此阶段前后轴制动力的分配为
(5)
式中,Fbf为前轴制动力;Fbr为后轴制动力。
当车辆处于图6中的制动阶段2时,修正后的电机实际提供的最大制动力不能满足制动所需的全部制动力,则不足的制动力由机械制动力补充,此阶段前后轴制动力按固定比例分配:
(6)

(7)
式中,Fbfh为前轴机械制动力;Fbrh为后轴机械制动力;γ为前轴制动力占总制动力的比例。
4 制动能量回收仿真试验研究
4.1 车辆仿真模型的搭建
首先在MATLAB/Simulink中建立图7所示的车辆仿真模型。其中,Acc_cmd、Bra_cmd分别表示驾驶员模型(Fuzzy PID Driver)输出的油门踏板信号和制动踏板信号;Cycle、Style表示工况和驾驶风格识别模型(Cycle and Style Recognition)的识别结果;结果传递到能量管理策略模型(Energy Management Strategy),输出对离合、电机和发动机的控制信号。整车参数如表3所示。

图7 整车仿真模型Fig.7 Vehicle simulation model

表3 车辆模型主要参数
4.2 工况和驾驶风格识别模型
工况识别模型接收来自车辆运动学模型传来的实时车速信号,驾驶风格识别模型接收来自驾驶员模型输出的油门踏板和制动踏板信号,经过计算得到工况和驾驶风格识别所需的输入参数后,判断仿真时间是否是50 s的整数倍,如果是则进行工况识别,输出的识别结果作为工况修正因子的确定依据。由于不同工况下驾驶风格的识别参数不同,因此,在对驾驶风格进行识别时需要根据工况识别结果选择对应工况下的驾驶风格LVQ神经网络识别参数进行识别,并输出驾驶风格的识别结果作为驾驶风格修正因子确定的依据。识别流程见图8。

图8 LVQ神经网络识别工况和驾驶风格的流程Fig.8 Steps to identify driving cycle and driving styleby LVQ neural network
4.3 仿真结果对比分析
为验证本文提出的制动能量回收策略的有效性,以实验数据合成的随机工况、UDDS工况以及NEDC工况作为仿真工况,以车速跟踪、电池SOC变化和再生制动力参与等情况作为评价指标,将本文所提出的能量回收策略与固定比例的制动能量回收策略和基于车速和制动强度的制动能量回收策略进行对比。
仿真时,工况修正因子和驾驶风格修正因子取值如下:α1=0.21,α2=0.39,α3=0.63,α4=0.69;β13=0.38,β12=0.57,β11=0.75;β23=0.39,β22=0.52,β21=0.65;β33=0.39,β32=0.52,β31=0.65;β43=0.47,β42=0.59,β41=0.72。将电池SOC的初始值分别设置为80%和30%,对电量消耗模式(CD)和电量维持模式(CS)分别进行仿真分析。
4.3.1工况和驾驶风格识别结果分析
图9为在给定的随机工况、UDDS及NEDC工况下车速跟踪曲线。从整体上看,本文的车辆模型在三组工况下均能较准确地跟踪目标车速。
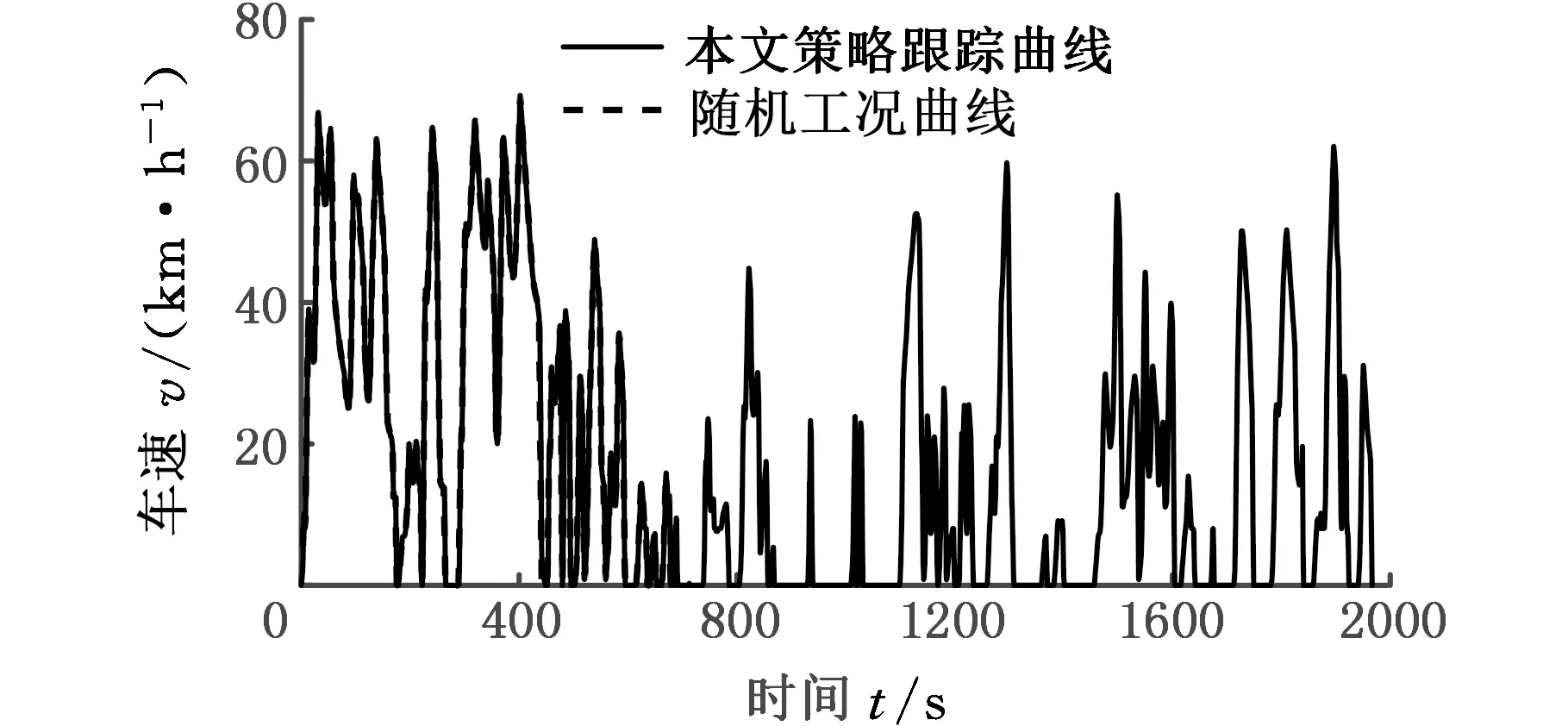
(a)随机工况
图10所示为三种工况下工况和驾驶风格的识别结果。其中,工况类型中的1、2、3、4分别表示拥堵工况、低速工况、中速工况和畅通工况,驾驶风格中的1、2、3分别表示谨慎型、稳健型和激进型。从识别结果可以看出,三种工况的工况类型识别结果大多处于中速工况和畅通工况;随机工况和NEDC工况的驾驶风格识别结果大多处于谨慎型,UDDS工况识别结果大多处于谨慎型和激进型,三种实验工况的工况类型和驾驶风格都是多变的。

(a)随机工况
4.3.2电池SOC对比分析
图11为电量消耗(CD)模式下电池SOC变化对比曲线,可以看出,在所给定的三种工况下,本文提出的能量回收策略在能量回收效果方面具有明显的优越性。相对于本文所提出的策略,在畅通工况谨慎驾驶风格的情况下,固定比例的制动能量回收策略会导致电机过早地退出制动能量回收,无法完全发挥其回收能量的优势。结合图11和表4可以看出,效果最显著的是UDDS工况,而NEDC工况只在最后阶段能量回收效果较明显,主要原因是之前所有制动都相对平缓,低速工况稳健型制动模式下电机提供的制动力能够满足制动需求,最后一段制动则满足不了,本文制动策略的优势才展现出来。而相较于采用基于车速和制动强度的制动能量回收策略,本文策略在UDDS工况下的能量回收效果仍旧显著。

(a)随机工况

表4 CD模式下电量消耗情况对比
图12给出了电量保持(CS)模式下SOC曲线和油耗曲线。结合图12和表5可以看出,在电量保持模式下,本文提出的制动能量回收策略相比固定比例的制动能量回收策略具有明显的优势。在随机工况和UDDS工况下节油效果非常明显,虽然在NEDC工况下的表现和固定比例制动能量回收策略油耗相同,但是电池SOC却增加了。相较于采用基于车速和制动强度的制动能量回收策略,本文策略的节油效果显著。总体来说,在电量保持和电量消耗模式下,本文提出的制动能量回收策略相对于固定比例和基于车速和制动强度的制动能量回收策略具有明显的优势,能充分发挥出混合动力汽车的节能特性。

(a)随机工况

表5 CS模式下电耗和油耗对比
4.3.3再生制动力矩对比分析
三种工况下再生制动力矩对比如图13所示,相比于固定比例的制动能量回收策略,在随机工况和UDDS工况下,本文策略下的再生制动力所占的比例远高于固定比例的制动能量回收策略,这是两种工况下能量回收效果显著的主要原因。而在NEDC工况中,两种策略的再生制动比例相差不大,更能进一步解释在NEDC工况下,本文制动能量回收效果不显著的问题。此外,本文策略在UDDS工况下的再生制动力所占的比例远高于基于车速和制动稳定性的制动能量回收策略。

(a)随机工况
5 结论
(1)针对混合动力汽车制动能量回收的制动安全及能量回收效率等问题,提出了考虑工况和驾驶风格耦合影响的混合动力汽车制动能量回收策略。通过引入工况修正因子与驾驶风格修正因子,降低了电机再生制动力在拥堵工况、激进型驾驶风格下的参与程度,提高了电机再生制动力在畅通工况、谨慎型驾驶风格下的参与程度,从而在保证制动稳定性的同时,提高了混合动力汽车的能量回收效率。
(2)搭建了混合动力汽车仿真模型,并对提出的策略与固定比例制动能量回收策略及基于车速和制动强度的制动能量回收策略进行仿真对比分析,验证了提出的再生制动力控制策略的优越性。对于给定的随机工况和UDDS工况,本文提出的制动能量回收策略相对于固定比例的制动能量回收策略,在制动稳定性和能量回收效果方面有更好的表现,且能量回收效率有了显著的提高,能够有效地提高混合动力汽车的行驶里程;对于NEDC工况,本策略所展现出来的能量回收效果有限,但不影响其参考价值。而相对于基于车速和制动强度的制动能量回收策略,本文所提出的制动能量回收策略同样具有优越性。
