基于网络的大型造波机运动控制系统
2022-01-25徐青发张建康吴晓生周益平陶周栋
徐青发,张建康,吴晓生,钱 斌,周益平,陶周栋
应用研究
基于网络的大型造波机运动控制系统
徐青发,张建康,吴晓生,钱 斌,周益平,陶周栋
(无锡东方海洋测试设备有限公司,江苏 无锡 214082)
波浪是海岸工程、港口工程、船舶和海洋工程中需要考虑的主要荷载因素。目前研究波浪载荷的主要技术手段是在试验水池放置缩小的结构物模型,并模拟现场的波浪环境,从而实现波浪载荷的精确测量,为工程设计提供科学依据。造波机是试验室模拟波浪环境的关键设备,其运动控制系统的性能直接关系到模型试验的精准度。本文介绍一种基于EtherCAT网络的大型造波机运动控制系统,该系统具有良好的同步运动性能,并具有良好的扩展性,可为先进造波方法研究提供设备平台。
EtherCAT 造波机 同步运动
0 引言
为精确模拟海洋或港口波浪环境,国内外相继建立了大型多向波浪水池。1956 年的荷兰瓦格宁根水池建成,共有 158 块摇板[1]。2003年荷兰Delft 水工试验室为中国船舶科学研究中心建造了188块板L型造波机,这是国内首套由伺服电机驱动的大型多向不规则波造波机系统。2008年上海交通大学海洋深水试验池建成,共有222块摇板,也采用荷兰技术。此后,国内造波机生产厂商开始崛起。
随着工业以太网技术和交流伺服控制技术的快速发展,液压造波机和空气式造波机占比越来越小,基于网络的交流伺服控制系统已成为大型多轴造波机运动控制的首选。先进的工业以太网技术具有高实时性、高同步性和极强的可扩展性;交流伺服控制系统具有精度高、响应快等特点。本文介绍某水池的大型造波机运动控制系统。该水池采用300块摇板,呈L型布置(短边100块,长边200块),可模拟规则波,不规则波,斜向波。造波机控制系统由1台上位机、3台控制器、300个驱动器、300台伺服电机、电线电缆和其它附件组成,300个轴拥有各自独立的运行曲线,造波过程中所有的轴采用分布式同步时钟实现同步运行。本文首先简单介绍摇板造波机的工作原理,然后着重阐述整个控制系统的构建和实现方法,并提供了相关试验数据。
1 造波机原理与计算
1.1 造波机工作原理
摇板造波机计算模型如图1所示,水深=20,造波板浸深=1.5,摇板绕铰支点沿铅垂面做往复简谐运动,运动角速度为行程为0,假设水为无旋不可压缩理想流体,根据微幅波理论可知运动产生的行进波波高为H[2]。
(2)
1.2 造波机机械结构
本文造波机选用同步带驱动方式。每台摇板造波机机械装置由铰点、摇板、同步带、同步带轮、伺服电机和同步带张紧调节器等组成。机械装置将电机的转动转换成摇板的转动。为方便运输和安装,10个造波机单元组成1个造波机组如图2所示。

图2 摇板造波机组机械装置
按照波高和周期要求计算出造波机行程和造波板的运行速度;根据造波板运动与波面变化的规律应用流体力学相关知识可得到造波板板面的压力分布状况。进而求出电机速度、扭矩、功率等参数。
1.3 伺服系统选型计算
波浪的主要技术指标是波长和波高的对应关系,伺服系统通常根据波浪指标,再结合机械传动装置的减速机,同步带弧半径,造波板板宽等参数计算伺服电机的扭矩和转速指标。本文造波板板宽0.6米,电机和造波板的传动比为320:1。表1为单位宽度(宽度1米)造波板的计算数值。第1列为波长,第2列为波高,第3列为计算得到的造波板运动频率,第4列为造波板行程,第5列为造波板最大受力,第6列为造波板最高运行速度。折算到电机侧可得电机最大转速1325 rpm,电机最大扭矩6.6 N.m。

表1 单位宽度造波机选型计算
2 控制系统硬件介绍
2.1 控制系统拓扑图
本文选用倍福AM8052电机,AX5103伺服驱动器,C5102运动控制器。中控室上位机通过以太网与倍福的3个运动控制器进行数据交换,发送运动指令和造波时序文件并监控电机和驱动器状态信息。控制层的核心为3台C5102运动控制器,它们将上位机的指令通过EtherCA网络转换成驱动器的运动指令。文中1#C5102控制器设置为独立时钟模式,2#、3#C5102分别通过EtherCAT桥EL6695和1#控制器连接。1#控制器设置为独立模式,2#、3#控制器采用配置为外部时钟同步模式,整个系统的DC时钟将同步于1#控制参考时钟,实现300个轴的精确同步控制。

图3 控制系统拓扑图
2.2 EtherCAT网络
大型造波机控制系统的精髓就是要实现各轴的精确同步控制,而具有精确校准分布式时钟EtherCAT总线很好地满足了这个需求。EtherCAT 参考新的IEEE1588 标准实现了一种精确的时钟同步机制,该机制采用分布式时钟来同步所有支持 DC(Distributed Clock)功能的从站设备,使从站的动作可以同时进行。对于分布式100轴伺服电机可在100 μs内完成各轴命令数据和状态数据的发送与读取,分布时钟同步技术使各轴的时钟偏差远小于1 ms[3]

图4 EtherCAT网络运行原理图
由于通讯利用了逻辑环网结构和全双工快速以太网而又有实际环网结构,主站时钟可以简单而精确地确定对每个从站时钟的运行补偿。EtherCAT的工作原理如图4所示[4]。EtherCAT网络结构一般采用主从结构方式。一个完整通信周期数据由下行数据帧和上行数据帧组成,主站周期性的下发给下行数据帧给1~n号从站,n号从站将数据报文进行上行传输,反向返回并依次经过所有从站发回给主站,结束一个周期的通信。
2.3 驱动器和电机
AX5103伺服驱动器,电流控制环最快可达 62.5 µs;通过分布式时钟可实现系统精确同步;内置EMC滤波器,电抗器。
AM8052电机额定扭矩7.5 Nm,额定转速2000 rpm,多圈绝对值编码器。通过总线技术,载波技术实现电机动力电缆和编码器电缆合二为一,大大方便了布线。
3 控制系统软件介绍
3.1 TwinCAT软件平台
倍福的实时控制工程软件为基于Windows的TwinCAT(The Windows Control and Automation Technology),具有实时核,顺序控制 (软 PLC),运动控制 (软移动控制),和通讯 (ADS)功能。通过 TwinCAT 实时核调度 CPU 资源,完成实时的逻辑运算和运动控制,其中由TwinCAT PLC 负责具体的逻辑运算,由 TwinCAT NC 负责运动控制。由于采用ADS通信技术,它在数据交互上具有先天优势。ADS(Automation Device specification)是倍福自动化设备规范的简称,是一种独立于设备和数据总线的访问设备的接口控制,为设备之间的通讯提供路由[5]。基于ADS 的TwinCAT 系统构架如图5所示。在TwinCAT 系统中,各个软件模块(如TwinCAT PLC、TwinCAT NC、Windows 应用程序等)的工作模式类似于硬件设备,它们能够独立工作,通过 ADS 而完成各个模块之间的信息交换。

图5 TwinCAT系统架构
3.2 上位机软件
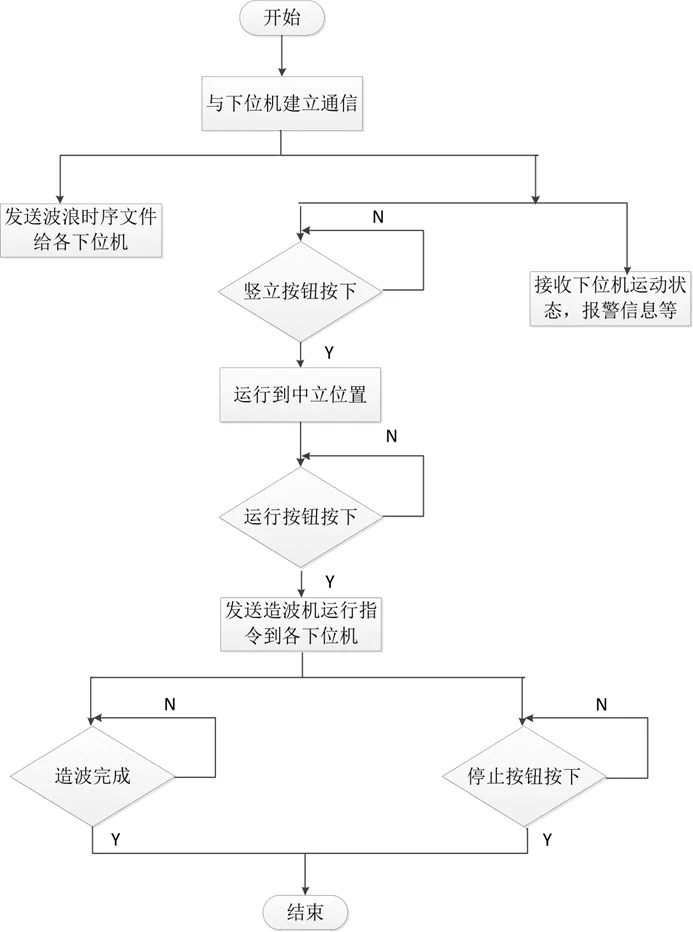
图6 上位机流程图
上位机软件是所有人机操作接口的汇总,造波机的常规命令操作和状态监控均在上位机上完成。本文下位机为3台倍福C5102控制器,上位机为1台工控机。上位机选用WIN10-64位操作系统,开发平台软件为C++和duilib界面库。上位机的主要程序流程如图6所示。上位机与各下位机之间建立SOCKET通信和ADS通信,SOCKET通信用于发送实时性要求不高但数据量大的波浪时序文件,ADS通信用于上下位机之间传递命令、运动状态和报警信息等数据。
上位机界面分7个页面:单轴设置页面用于设置各轴在中立位置时的编码器反馈值;运行界面用于发送命令及波浪时序文件;数据生成界面用于生成简单的波浪时序文件(仅为简谐波,复杂的波浪时序文件如不规则波,斜向波,三维波等均由专门的波浪模拟软件生成);曲线显示界面用于显示待运行的波浪时序文件YT图;报警管理用于接收并存储下位机发送来的故障和报警信息;轴屏蔽设置用于屏蔽某些轴使其不运动(常用于造波机组L型布置时,交角处若干造波板的处理);调试维护为选定造波板的点动运行。由于界面较多,本文仅展示最核心的运行界面,如图7所示。

图7 上位机运行界面
3.3 下位机软件
下位机有两重身份:SOCKET服务器(用于接收上位机发送的造波时序文件)和运动控制器(解析上位机的命令,控制驱动器和电机运行,并返回相关运动状态信息和故障报警信息)。下位机程序框图如图8所示。
造波机的运动控制一般根据波浪参数先计算出每块造波板的造波时序文件(造波机的位置序列),然后让它们按照各自的时序文件同步运动。倍福的TwinCAT NC FIFO功能非常适合这种控制。 FIFO把1个n维数组组成堆栈,数组中的值就是n个轴的位置序列。控制器要做的就是一边读入造波时序文件填充FIFO,一边调用FIFO_Start函数让驱动器和电机运行消耗FIFO数据。从而达到连续造波的目的。下位机采用自定义的FB_Fillfifo函数块实现这个功能:造波时序文件被分割成若干长度为iEntries,维数为iColDIM的数组单元,FIFO消耗了80%时,函数块置位bFeed信号要求填充1个数据单元,数组单元填入成功后函数块复位bFeed同时置位bUpDate。

图8 下位机流程图

图9 FIFO管理功能块
4 运行效果
大型多板造波机运动控制的的主要指标是造波板的动态跟随性和运动同步性,本文以运动幅度1度,运动频率1 Hz为例说明。
4.1 动态跟随性

图10 第250轴动态跟随性监控
监控第250轴的设定位置曲线和运行位置曲线,图10横坐标为时刻,纵坐标为造波板位置,绿色曲线为设定位置曲线,红色曲线为实际运行位置曲线。两条曲线基本重合,造波机动态跟随性良好。
4.2 同步性
监控第1轴和第300轴的运行位置曲线(如图11)红色曲线是第1轴运行位置曲线,绿色曲线是第300轴运行位置曲线,两轴时间延时为2 ms。本文监控了第1轴,第100轴,第101轴,第200轴,第201轴和第300轴的位置曲线,分析结论:不同控制器之间的造波板位置曲线延时为2 ms,同1控制器内的各造波板位置曲线延时为0(通过ms级TwinCAT自带录波软件无法分辨)。改变造波板的运动频率和运动幅度分析的同步性结果也相同。说明本文基于网络的大型造波机运动控制系统同步性良好。

图11 第1轴和第300轴同步性监控
5 结论与展望
本文介绍了一种基于网络的大型造波机控制系统,比较全面地阐述了造波机原理,造波机结构,控制系统的硬件部分和软件部分,并实际测量了造波板之间的同步性。该系统具有较好的同步运动性能和较好的可扩展性,非常适用于大型造波系统。当前造波技术研究的热门是主动消波技术:采集造波板上的浪高信号来实时修正造波机的运动。本系统补充相应的AD采样模块后可以满足主动消波的要求。
[1] A.N Williams, W W Crull, Simulation of directional waves in a numerical basin by a desingularized integral equation approach. Ocean Engineering, 2000. 27(6): p. 603–624.
[2] 郑文涛, 姚木林, 兰波,等. 水池摇板式造波机传递函数研究[J]. 船舶力学, 2011, 15(11): 1234-1239.
[3] 聂俊杰, 徐东亮, 王龙飞, 等. 基于EtherCAT 网络的伺服造波控制系统[J]. 组合机床与自动化加工技术, 2016(5): 91-93.
[4] 丁可. 基EtherCAT 的多控制器同步的造波机控制系统设计[D]. 大连: 大连理工大学, 2018.
[5] 史小磊. 基于BECKHOFFTwinCAT的开放式数控系统软件开发[D]. 哈尔滨: 哈尔滨工业大学, 2011.
Design of EtherCAT based motion control system of large wave maker
Xu Qingfa, Zhang Jiankang, Wu Xiaosheng, Qian Bin, Zhou Yiping, Tao Zhoudong
(Wuxi Dongfang ocean testing equipment Co., Ltd, Wuxi 214082, Jiangsu, China)
TP273
A
1003-4862(2022)01-0019-04
2021-06-24
徐青发(1981-),男,高级工程师,主要从事电气控制技术。Email:lampade@126.com