面向森林环境地面激光数据的树干提取与定位*
2022-01-22班厚恒陈茂霖王溪雨
班厚恒, 陈茂霖, 黄 浩, 王溪雨
(重庆交通大学 土木工程学院,重庆 400074)
森林是地球上可再生资源及陆地生态系统的主体。对森林资源进行高效、准确监测是保证林业生态安全和经济效益的关键[1]。树的位置、高度等信息的获取都可以通过树干提取来完成[2-3],人工法是传统的树干提取方法,但费时费力,而且由于人为或技术问题,获取的数据精度不高[4-6];自动化的调查方法能大大提高数据采集处理的效率,因而成为相关研究的主要关注点。近年来,三维激光扫描技术作为主动遥感技术设备,在高精度森林三维参数提取研究中被广泛应用并且具有优越性[3],越来越多的学者基于不同平台的三维激光扫描技术与树干拟合算法,提出了一系列获取树木详细信息的方法,如曹明兰等实践了一种无人机倾斜摄影系统与背包式三维激光扫描系统相结合的森林景观三维场景建模方法[7];袁春东等利用车载激光扫描系统采集了园林绿化的三维点云,提取了行道树的位置、胸径等参数[8]。但上述两种方法受限于平台成本较高或无法应用于较为密集的林区。王祺等提出一种基于蚁群算法和B样条曲线拟合技术实现树木胸径的自动提取[9];Carlos Cabo等选择将垂直方向上具有连续性的体素作为树干候选点,利用最小二乘法拟合实现树干的提取[10]。但以上方法仅对无遮挡的树木进行实验效果良好,缺乏对复杂环境下树木的实践。可见目前国内外研究多是基于小范围简单环境,或是从理论层面提高定位精度,而缺少直接适用于复杂环境下工程实践的树干定位方案。
本文以树干点云的提取作为主要导向,针对森林环境探索适用于森林场景点云分类的样本提取原则和特征类型,提出了一套实践性较高的基于地面激光扫描数据的森林环境下树干坐标提取流程,为相关工程的树干提取工作提供参考。
1 基本原理
利用激光扫描数据来提取森林环境下树干位置的坐标,需要解决的主要问题是从整体点云数据中识别并提取出单木点云数据,计算得到树干的位置坐标。
本文采用的方案是:首先,对原初数据进行滤波处理,得到地面点与非地面点,对非地面点分别采用特征提取和手工选取的方式得到树干点,同时,对地面点进行建模得到3D地面模型;其次,对特征提取得到的树干点云进行聚类得到单木点云,对单木点云进行拟合计算得到树干位置坐标;然后,将手工选取得到的树干点与3D地面模型结合,手工点出两者结合处的三维点得到树干位置的参考坐标;最后,将拟合计算得到的树干位置坐标与树干的参考位置坐标进行比对,验证方法的可靠性与准确性。研究的数据处理流程如图1所示。
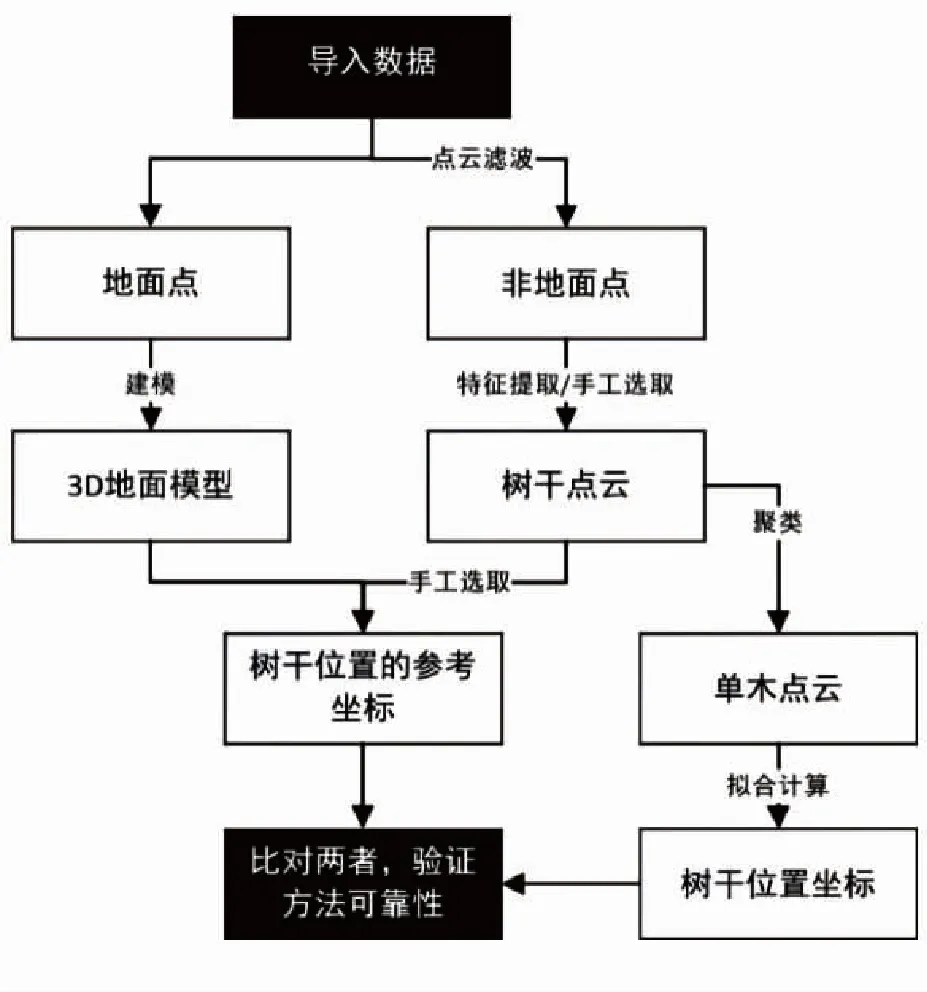
图1 数据处理流程
2 数据处理
2.1 数据滤波
数据滤波的目的是分离原始点云数据得到非地面点数据与地面点数据,并在一定程度上排除噪声点的干扰。本文所采用的分离方法为布料模拟滤波算法(Cloth Simulation Filtering,CSF)[11],该方法适用于多种自然条件下的地面点与非地面点识别与分离,具体原理为:先将激光点云数据倒置,在点云上方设置模拟布料,通过设定布料网格分辨率以确定并生成模拟粒子数;令每个粒子按重力下降,落到距离对应顶部激光点阈值范围内的位置停止,将该位置确定为该粒子的高度,迭代计算,确定所有粒子的高度,此时,所有模拟粒子覆盖在倒置的点云数据上,只需要判断每个粒子与其下方对应的激光点之间的距离是否大于设定的阈值,就可得知该点是否为地面点,从而实现地面点与非地面点的分离。
2.2 树木特征提取
原始点云数据进行滤波后,可得到分离后的地面点与非地面点,非地面点中包含各类地物点云数据,因此,需要提取出树干点云。本文采用的是基于多尺度维度特征的分类方法提取树干,该方法由Brodu N等提出[12],点云在特定位置和尺度下可以划分为三类:(1)一维线状点云;(2)二维面状点云;(3)三维空间点云。可以根据不同尺度下的点云特征,逐点对点云进行主成分分析计算,描述点云在空间上的三维特征,进而实现点云在三维场景中的分类。
维度特征的计算过程如下:
(1)首先,计算样本点在给定尺度下的局部维数特征Pi,将点云数据的坐标定义为一个数据集C,C={Pi=(xi,yi,zi)},i=1,…,N。
(2)以点云中任意一点为球心,尺度S作为球的直径,由于不同尺度下点云的维数特征不同,因此,对点云的不同尺度进行主成分分析计算能得到不同特征值λi,i=1,2,3,按照λ1>λ2>λ3的顺序进行排列,由此可计算得到其各维度下的维度特征值Pi:
(1)
(3)若P1>P2、P3,则说明一维线型特征最大;若P2、P1>P3,则说明二维面状特征最大;若P1~P2~P3,则说明三维空间特征最大,且P1+P2+P3=1。
各特征值表示了样本点属于三个维度标签的概率,三维点云的三维特征越明显,则三个特征值的比例越接近,此时点云分类就越容易。如图2所示,为对树冠点与树干点进行维度特征提取后的结果基于不同的点云维度区分,进行渐变颜色渲染,可以看出,树干部分与树冠部分基本被区分为蓝色与绿色。

图2 树冠点与树干点维度特征提取(局部)
2.3 拟合计算树干位置坐标
分离树干点与树冠点后,对树干点云进行聚类处理以得到单木点云数据,由此可对单木数据进行拟合计算得到其坐标。树干坐标即树干底部与地面接触的位置,因此,对单木数据的拟合可仅考虑树干最底部的位置,从而达到简化计算与降低编程难度的目的。本文采用最小二乘法[13]对树干点云进行圆拟合以计算出单棵树干的坐标,原理如下:
根据圆方程有:
(x-a)2+(y-b)2=r2
(2)
式中,(a,b)为圆心坐标;r为圆半径。
展开式(2)可得:
x2+y2-2ax-2by+a2+b2=r2
(3)
令A=2a,B=2b,C=a2+b2-r2,可以将式(3)简化为:
x2+y2-Ax-By+C=0
(4)
最小二乘拟合要保证v=∑(x2+y2-Ax-By+C)中的v最小,可根据偏导计算使其对各个参数的偏导均为0,使v最小,解得:
(5)
2.4 树干位置参考坐标提取
为了验证计算得到的树干坐标结果是否可靠,需要得到树干位置的参考坐标,将其与计算得到的树干位置坐标进行比对。本文采用的方法是基于地面点云构建三角网3D地面模型,将特征分离得到的树干点云数据与其结合,手工点出树干与地面模型结合处的三维点,将此点坐标作为树干位置的参考坐标。
2.5 结果可靠性验证
结果的优劣需要有指标来进行衡量,本研究采用召回率-准确率来评价算法,其计算公式如下:
(6)
式中,Recall为召回率;Precision为准确率;TP为正确检测数(True Positive);FP为错误检测数(False Positive);FN为漏检数目(False Negative)。
在本文中,TP为正确检测出的树干位置,FP为被误检的树干位置,FN为漏检的树干位置。一般而言,召回率与准确率越高,算法效果越好。
3 实验分析
3.1 点云滤波并构建地面模型
实验采用的数据是在武汉珞珈山区域利用Reigl-VZ400扫描仪采集得到的森林环境下一测站数据,扫描仪设定的角分辨率为0.04°。首先,采用RiSCAN软件中的布料模拟滤波算法功能分离得到地面点与非地面点,结果如图3(a)所示,蓝色部分点云为非地面点,黑色部分为地面点,图3(b)为分离后整个测站的地面点云。
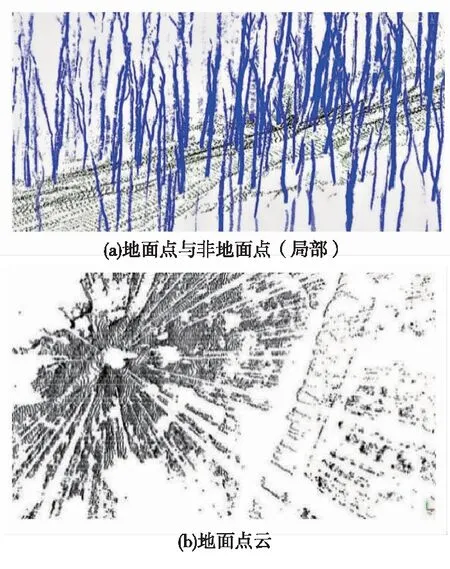
图3 点云滤波
然后,利用CloudCompare软件的模型构建功能对地面点云进行建模,构建三角网3D地面模型。得到的地面模型如图4所示,由蓝色到红色代表高程逐渐增加。
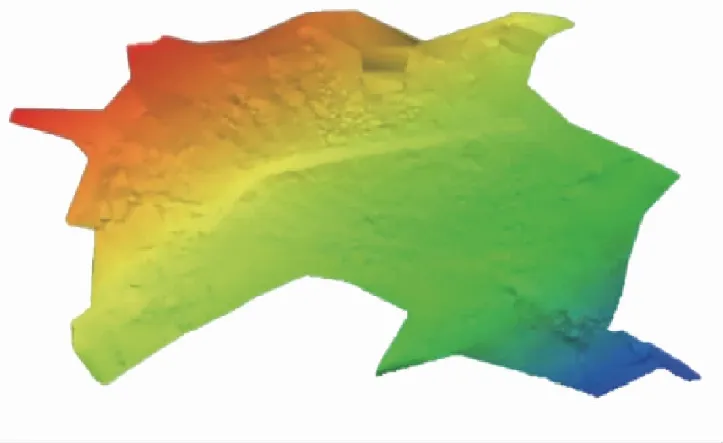
图4 地面模型构建
3.2 树干点提取结果
实验采用CloudCompare软件的基于多尺度维度特征的分类功能对非地面点进行特征提取,首先,需要人工选出多组不同的树干与树冠样本,基于该样本,利用CloudCompare的分类模型训练功能构建分类模型,图5(a)为一组人工选取的树干与树冠样本。再利用分类模型对非地面点云进行特征提取,从而分离得到树干点,分类模型的优劣直接影响特征提取的分类结果。图5(b)为利用分类模型进行特征提取后,非地面点云的分类结果,其中,红色部分是树干点云,蓝色部分为树冠点云。

图5 特征提取分离树干点与树冠点
3.3 拟合计算树干坐标并提取树干位置参考坐标
利用CloudCompare软件的聚类功能对通过特征提取得到的树干点云进行聚类,可得到单木点云数据,然后,采用MATLAB软件编写代码,使用最小二乘法对单木进行圆拟合便可计算得到树干位置坐标。
为获取树干位置的参考坐标,将3.1步骤中滤波得到的非地面点与构建的地面模型导入Geomagic软件,手工获得一测站下树干位置的参考坐标。如图6所示,每一个绿色点即为一个手工点选的树干位置参考坐标。
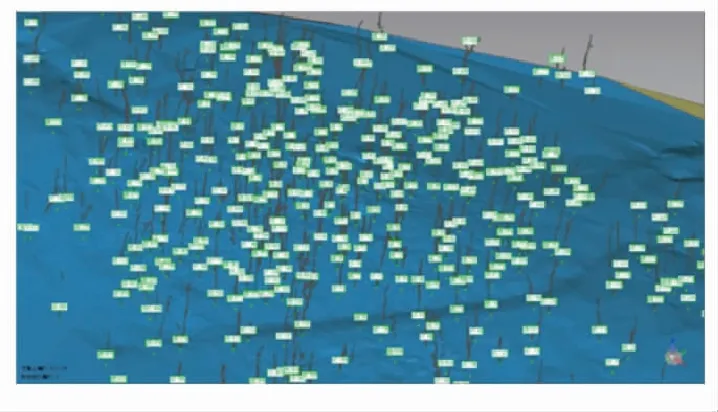
图6 树干位置参考坐标提取
3.4 实验结果
仅一组实验数据不足以说明方法的可靠性,因此,本实验在3.2特征提取阶段,通过选取多组样本,共构建20组不同的特征模型对非地面点数据进行特征提取,再对每一组数据进行拟合计算共得到20组计算结果,将20组结果与树干位置的参考坐标进行比对,以召回率-准确率作为指标,得到结果如表1所示。结果中有12组的准确率在80%以上,其余均高于70%;而召回率有9组高于80%,其余则低于70%。较高的准确率代表拟合计算得到的树干位置坐标能与树干位置的参考坐标相对应,表明计算得到的树干位置坐标基本正确;相对较低的召回率代表部分树干位置的参考坐标没有被计算出,即存在漏检现象。依据实验结果,可知本文的方法存在一定数量树干的漏检,但计算结果较为精确。

表1 可靠性验证
参考点与一组计算点的局部对比图如图7所示,○点为正确检测出的树干位置,×为误检的树干位置,*为漏检的树干位置,可看出正确检测树干分布广,误检树干较少,而漏检树干明显较多,这与表1实验组结果反应的较高准确率、较低召回率相吻合;且经观察,越靠近测站中心(坐标(0,0)处)误检与漏检树干越少,越靠近测站边缘误检漏检树干越多,以上现象表明,该实验中,检测精度与树干点距测站中心的距离成反比,距离越远精度越低,误检与漏检树干越多。

图7 参考点与计算点比对(局部)
4 结 论
本文提出了一种面向森林地面激光扫描数据的树干提取、拟合和定位的完整解决方案,以布料模拟滤波算法分离地面点与非地面点;利用基于多尺度维度特征的分类方法实现非地面点云的自动分类;构建三角网3D地面模型并与非地面点结合提取得到树干位置的参考坐标;采用最小二乘法成功实现了对单木数据的拟合并计算得到树干位置坐标;以召回率和准确率为指标,编写了评定树干坐标计算精度的代码,验证了本文所提出方法的可靠性与准确性。该流程得到的结果在测站中心区域附近准确率高,符合预期,未来拟从提高聚类精度、召回率方面进一步完善和改进。
