航速对潜艇操纵性影响分析
2022-01-22彭立程胡坤罗向前
彭立程 胡坤 罗向前
(中国人民解放军海军潜艇学院,山东青岛 266199)
潜艇航速大小及变化速度对潜艇水下操纵有不同程度的影响。特别是当潜艇面临舵卡、舱室进水等紧急情况时,及时改变潜艇航速对于挽回潜艇掉深具有不可替代作用。本文根据潜艇水下运动坐标系和符号规则,利用潜艇垂直面操纵运动方程及模型潜艇参数建立潜艇水下运动模型,采用Qt creator编程,对潜艇水下舵卡、舱室进水两种紧急情况进行仿真,并利用Matlab对仿真结果进行画图分析,制定了高速航行尾舵卡下潜舵与微速航行舱室进水2种危险情况的航速使用方案。
1.潜艇运动模型
1.1 潜艇垂直面运动模型
本文采用国际水池会议(ITTC)推荐的和造船与轮机工程学会(SNAME)术语公报的体系确立坐标系和符号规则[1],如图1所示。
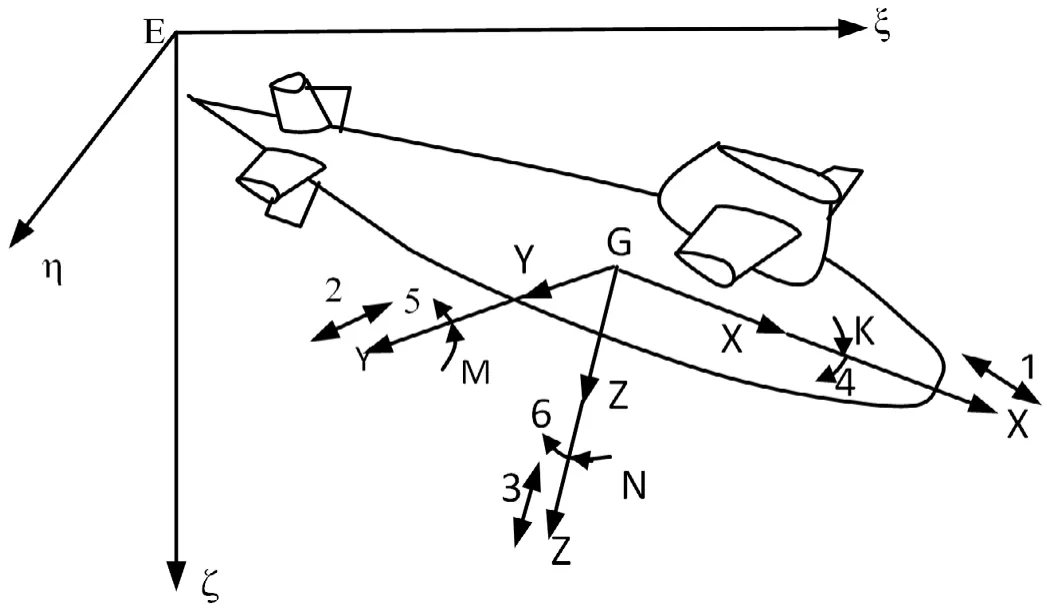
图1 坐标系与符号规则
坐标系采用2种右手坐标系:一是固定坐标系E-ξηζ(简称“定系”),固定于地球;另一个是运动坐标系G-xyz(简称“动系”),随艇一起运动,各坐标轴均按右手系确定。
潜艇在水下航行时,除了火灾以外,最大的安全隐患来自舵卡和舱室进水两方面[2]。操艇人员应适当的措施,如增速、停车减速、倒车和吹除潜艇主压载水舱等措施挽回潜艇[3]。本文重点对潜艇进行大舵角与中、高速等强机动工况进行研究,因此采用垂直面操纵运动非线性方程式[4]:
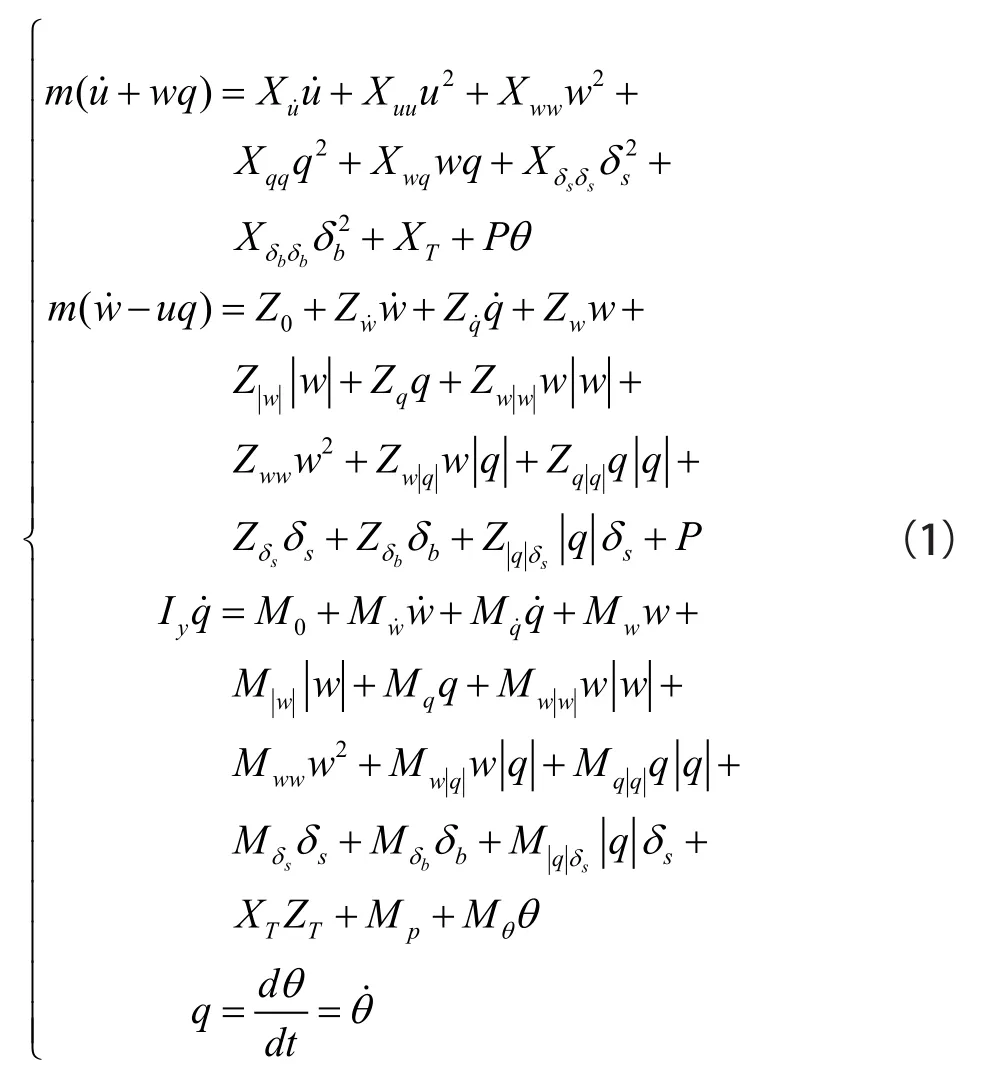
式中:m为水下全排水量的潜艇质量;u、w为潜艇沿坐标轴Gx、Gz的运动速度;、为潜艇沿坐标轴Gx、Gz的运动加速度;p、q为潜艇绕坐标轴Gx、Gy的旋转角速度;、为潜艇绕坐标轴Gx、Gy的旋转角加速度;X、Z为潜艇沿着坐标轴Gx、Gz的力;M为潜艇沿着坐标轴Gy的力矩;Iy为潜艇对坐标轴Gy的转动惯量;θ为潜艇的纵倾角;δb、δs为首、尾升降舵舵角;P为潜艇所受重力。
1.2 潜艇舱室进水模型
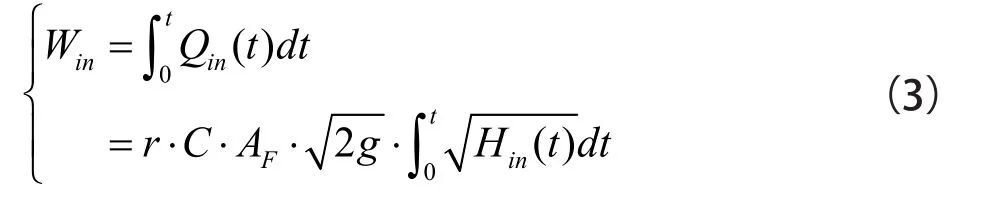
根据文献[5],潜艇舱室破损进水时,其进水流量为:

式中:AF为破口面积(m2);r为海水比重(取1025 kg/m3);C为水流经破口时的收缩系数;Hin为破口处舱内外压头差(m);g为重力加速度(9.8m/s2)。
对Qin积分,得到破损舱室进水量:
设潜艇破损舱距潜艇重心的位置为(x0,z0),则压头差Hin的表达式:
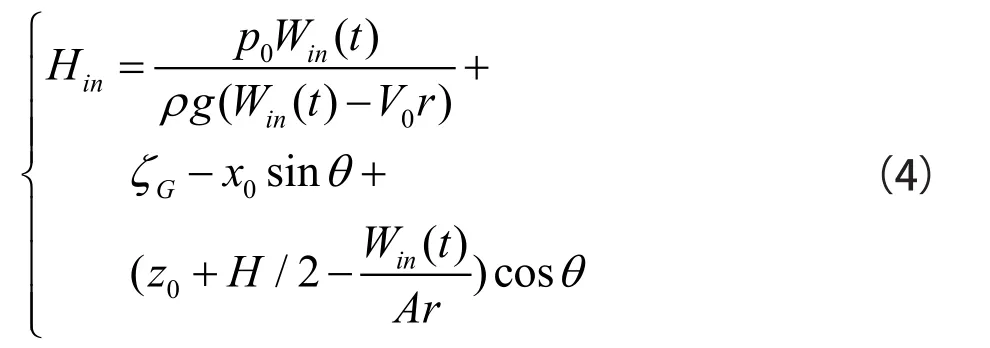
式中:p0为舱室的初始气压(取一个标准大气压);V0为舱室的初始气体容积(m3);A为舱室平均底面积;H为舱室高度。
则潜艇的损失浮力:

假设潜艇破损引起的损失浮力ΔP作用于Gi(xGi,yGi,zGi),由于其方向总是铅垂,所以在定系中其分量为{0,0,ΔP},经定系到动系的坐标转换,ΔP的分量在动系的表达式为:
ΔP对动系原点的力矩为:
2.航速对潜艇水下操纵运动影响分析
2.1 潜艇航速划分及特点
潜艇航行过程中,倒车工况大多使用于紧急情况,进车工况大致分为微速区、低速区、中速区和高速区。各速区特点如下:
微速区大多采用主电机经航工作制。由于航速较低,消耗电量较小,较为省电,能有效延长潜艇水下待机时间;螺旋桨转速低,噪音较小,可以有效提高潜艇隐蔽性,适用于潜艇长时间隐蔽航行。
低速区潜艇具有较好的操纵性,在适当航速下可以较为准确计算潜艇浮力差与力矩差,适用于潜艇下潜后行进间均衡以及日常训练操作。
中速区潜艇具有较高航速与机动性,适用于潜艇水面较长距离航渡与水下较大强度的机动。
高速区潜艇航速高,主电机耗电量大,螺旋桨噪音高,潜艇听测能力受限,适用于潜艇紧急规避攻击、动力抗沉或短时间长距离机动。
2.2 潜艇航速对操舵的影响
潜艇水下航行过程中,通常情况下,用首舵控制深度,尾舵控制纵倾,首、尾舵的作用效果随航速而变,中、高速主要用尾舵;微速、低速主要用首舵。采用1.1中坐标系与公式以及模型潜艇参数进行编程,仿真条件:潜艇初始深度200m,分别在微速、低速、中速、高速条件下,首舵操下潜满舵,其深度变化曲线如图2所示;潜艇初始深度200m,分别在微速、低速、中速、高速条件下,尾舵操下潜10°,其深度变化曲线如图3所示。
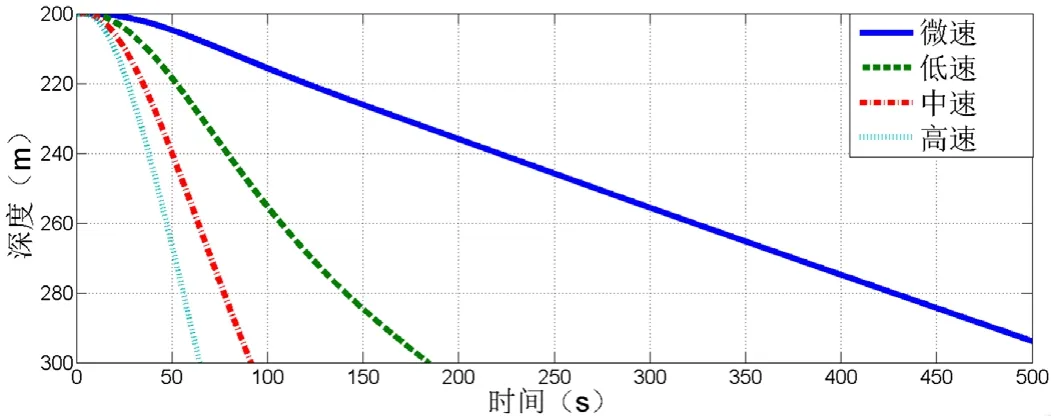
图2 不同航速首舵下潜满舵深度变化图
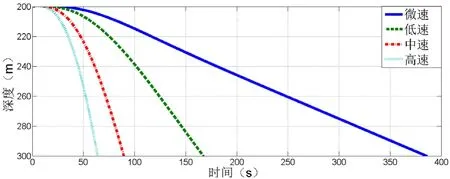
图3 不同航速尾舵下潜10°深度变化图
由图2、图3可知,潜艇首、尾舵操下潜舵一定舵角时,潜艇深度变化随航速增大而增大,并且在中、高航速时,潜艇在50s~100s便可达到300m深度,由此可以得到,中、高速区遭遇舵卡情况时,尾舵卡对潜艇安全威胁最大,留给潜艇指挥员的处置时间非常短,需要迅速做出决策。
2.3 潜艇航速对均衡的影响
潜艇水下航行过程中,需要及时采用注(排)水与首尾调水的方式均衡潜艇。一般来讲,微、低速航行时静力起主要作用;中、高速航行时水动力起主要作用。当潜艇由高速转换到低速时往往艇重,特别是微速航行,需要及时补充均衡。
潜艇水下遭遇舱室进水情况时,由于水泵排水速度有限,大多情况下无法抵消舱室进水对潜艇造成的影响,特别是首部舱室进水对潜艇安全航行影响更大。采用公式(2)~(7)建立舱室进水模型,仿真条件:潜艇初始深度200m,一舱破损面积0.05m2,进水60t后堵漏成功,分别在微速、低速、中速、高速保持不变的情况下,采用操相对上浮舵并进行应急吹除中组挽回,其深度变化曲线如图4所示。
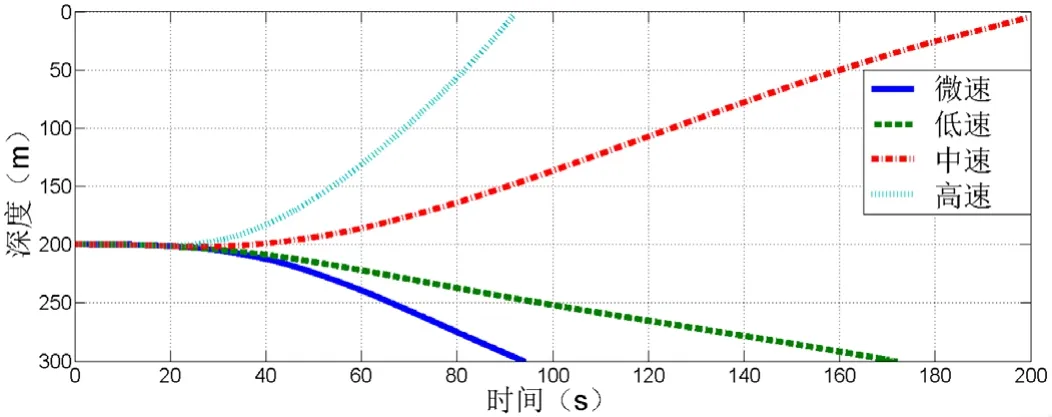
图4 不同航速下挽回一舱破损深度变化图
由图4可知,在微速与低速情况下,潜艇仅利用操舵与高压气吹除方式无法挽回潜艇深度;在中速与高速情况下,由于舵效较高,可以有效挽回潜艇深度,且航速越高挽回越迅速。
3.舵卡与舱室进水情况下潜艇航速使用方案
由2.2、2.3可知,潜艇中、高速航行过程中,尾舵卡下潜舵较大舵角对潜艇航行安全影响较大;潜艇微、低速航行过程中,舱室进水对潜艇航行安全影响较大。
3.1 高速航行尾舵卡下潜舵航速使用方案
潜艇高速航行时,由于水动力起主要作用,当尾舵卡下潜舵较大舵角时,会迅速导致潜艇首倾与深度增大,需立即降速,并采用首舵操上浮满舵、高压气应急吹除、均衡等措施挽回。舵卡仿真过程中,只需将舵角设定为某一值即可。仿真条件:潜艇初始深度200m,高速航行尾舵卡下潜舵20°,分别采用立即停车+吹除首组、立即停车+吹除中组、立即倒车+吹除首组、立即倒车+吹除中组,同时首舵操上浮满舵进行挽回,其深度变化如图5所示。
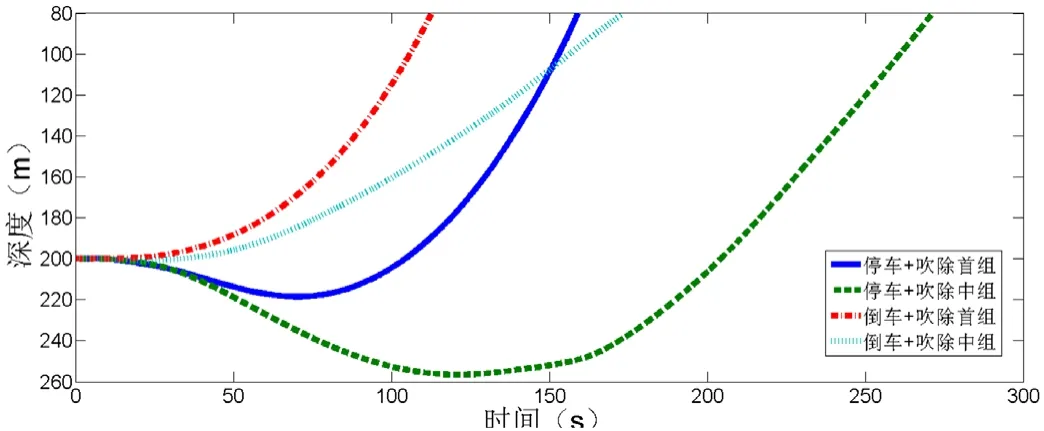
图5 高速挽回尾舵卡深度变化图
由图5可知,潜艇高速航行发生尾舵卡时,采用上述4种方案均可有效挽回潜艇掉深,且采用立即倒车+吹除首组方案挽回效果最好。
3.2 微速航行遭遇舱室进水航速使用方案
潜艇微速航行时,由于静力起主要作用,当遭遇舱室进水时,容易造成下潜惯性,若破损位置靠近艇首,还容易造成首倾惯性,需立即增速,并结合操相对上浮舵、高压气应急吹除等措施进行挽回。仿真条件:潜艇初始深度200m微速航行,一舱破损面积0.05m2,进水60t后堵漏成功,分别采用立即增速、延迟10s增速,同时操相对上浮舵进行挽回,其深度变化如图6所示。
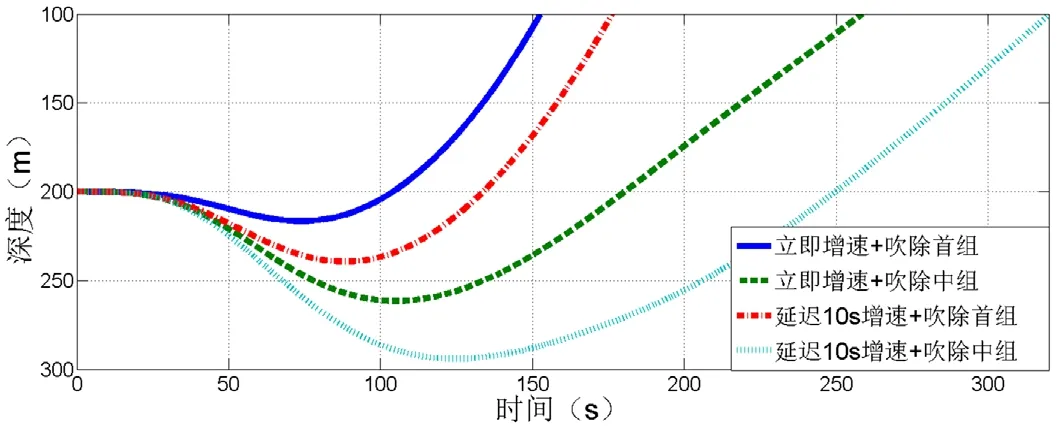
图6 微速挽回舱室进水深度变化图
由图6可知,潜艇微速航行遭遇舱室进水时,采用上述四种方案均可有效挽回潜艇掉深,且采用立即增速+吹除首组方案挽回效果最好。
4.结语
本文通过分析影响航速变化快慢的原因、航速划分及其特点、航速对操舵及均衡影响,得出以下结论:潜艇高速航行时尾舵卡下潜舵对潜艇航行安全影响较大;潜艇低速航行时舱室进水对潜艇航行安全影响较大。针对上述危险情况迅速改变航速是潜艇挽回掉深的关键,并制定了相应挽回方案。
