卫星动量轮异常掉电故障研究
2022-01-20王凯琳王俊彦杜黎明赵铁军耿玉玲
王凯琳,王俊彦,杜黎明,赵铁军,耿玉玲
(1.北京航天飞行控制中心,北京 100094;2.内蒙古军区,内蒙古 呼和浩特 010050)
1 引 言
卫星姿态控制系统中,一般采用动量轮作为执行机构,其主要组成包括飞轮驱动器和发电机、支承(位于轴承上的组合件)、飞轮及其动力控制传动线路等。依据“动量矩守恒”定律,当随意改变给定飞轮的旋转角度和动量时,就会产生一个反作用控制力矩,其大小与飞轮的角动量变化率成正比[1]。
某平台卫星正常模式采用V+L动量轮构型,由2个V形安装的50Nms动量轮MW1、MW2和1个用于备份的25Nms反作用轮RW组成。俯仰和滚动轴由V形安装的动量轮或L形结构的偏置动量轮和反作用轮进行控制,同时加速、减速动量轮实现对Y轴的姿态控制,滚动误差通过差动改变动量轮在Z轴上角动量进行连续控制,以满足精度要求。偏航轴采用被动控制方式,偏航误差的修正靠偏置角动量与轨道运动耦合来实现。V形轮安装示意图如图1所示,反作用轮的角动量方向与MW1或MW2的角动量的Z轴分量方向相反,以保证+L、-L形的合成角动量方向仍在-Y方向。MW1与本体-Y轴成20°偏向于+Z方向,MW2与本体-Y轴成20°偏向于-Z方向。反作用轮RW(25Nms)沿Z轴安装。飞轮的测速电路在姿轨控分系统中,采样周期为2.56s,测速精度为1.024rpm,飞轮的转速方向在姿轨控分系统中通过硬件处理后与转速信号一起送到OBC计算机。
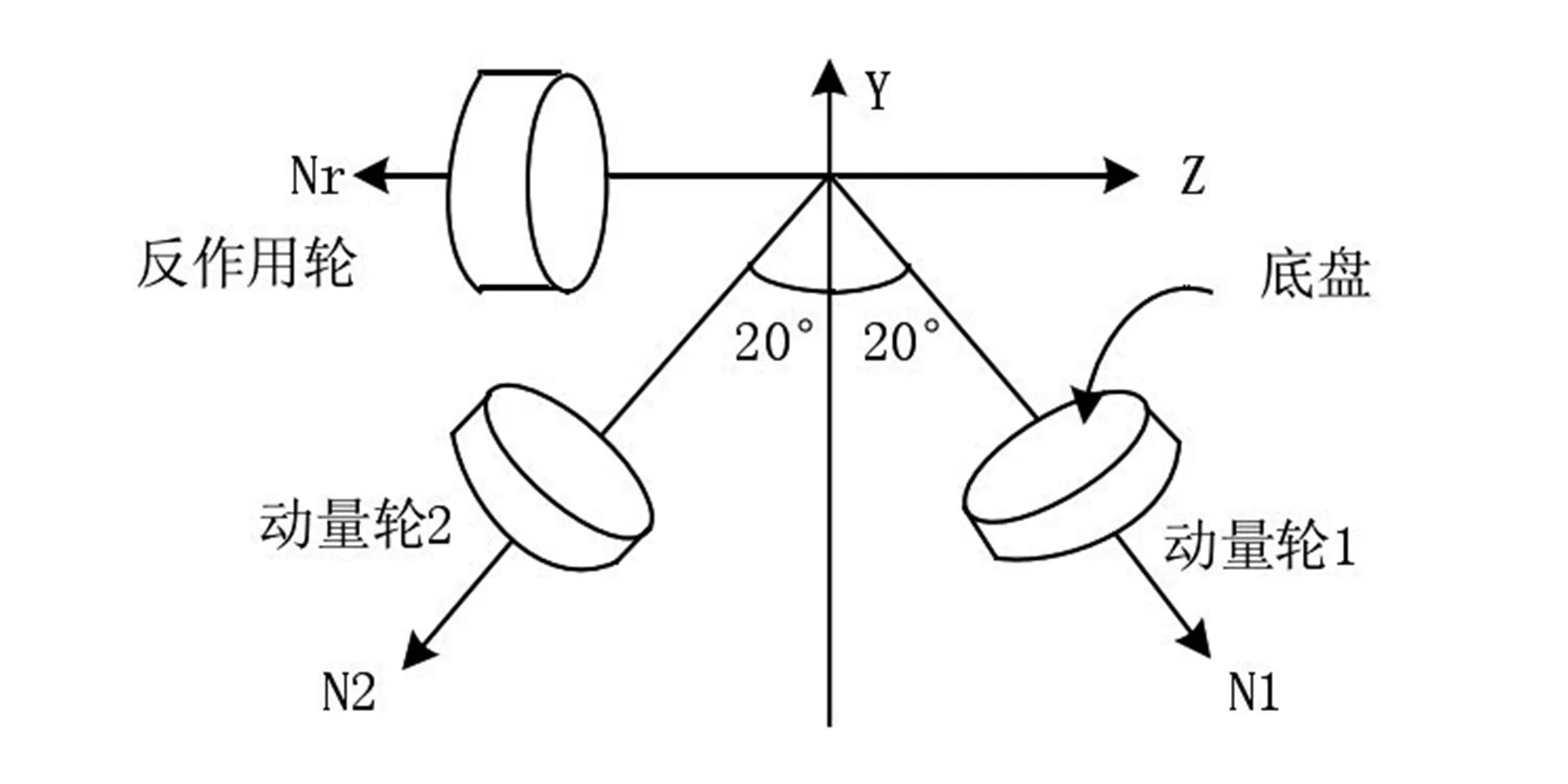
图1 动量轮安装示意图
对于动量轮,其遥测信号有动量轮的转速、动量轮角动量、动量轮力矩控制电压、动量轮马达电流以及动量轮的轴承温度,通常考虑采用一种划定监测信号极限值的方法来对上述几种观测量进行精确监测。
2 卫星异常现象
此卫星动量轮2发生掉电现象时,马达电压由26.33V突变为-0.53V。5min以后,由于动量轮2掉电造成卫星滚动轴姿态超差,控制分系统按照预定设计,转入软件故障报警模式。应用软件根据软件控制报警模式程控自动开启太阳敏感器线路盒SSE-A,陀螺线路盒GAE-A,启动陀螺马达,开启电源变换器PVC-B和PVC-C,切换推进线路盒至UPSE-A,卫星姿态由正常模式下的动量轮控制转为软件故障报警模式下的推力器控制。图2为卫星发生掉电故障时的动量轮2的马达电压、马达电流和转速曲线,图3为姿态曲线。
3 卫星异常现象原因分析
对动量轮掉电前后的指令发送情况进行复查,在动量轮组件异常断电前后的过程中未发送遥控指令。同时,复查了PVC输出电压遥测数据,在轨发生动量轮异常掉电现象前后,PVC输出电压在正常范围内,所以并不存在触发动量轮线路盒欠压保护动作的条件。若动量轮出现短路等故障,会造成供电电源出现过流,使过流保护电路工作,切断前置级电路,这会使动量轮快速制动。而遥测数据表明,卫星动量轮2制动力矩较小,与动量轮的损耗力矩吻合,未出现短路造成的制动力矩。
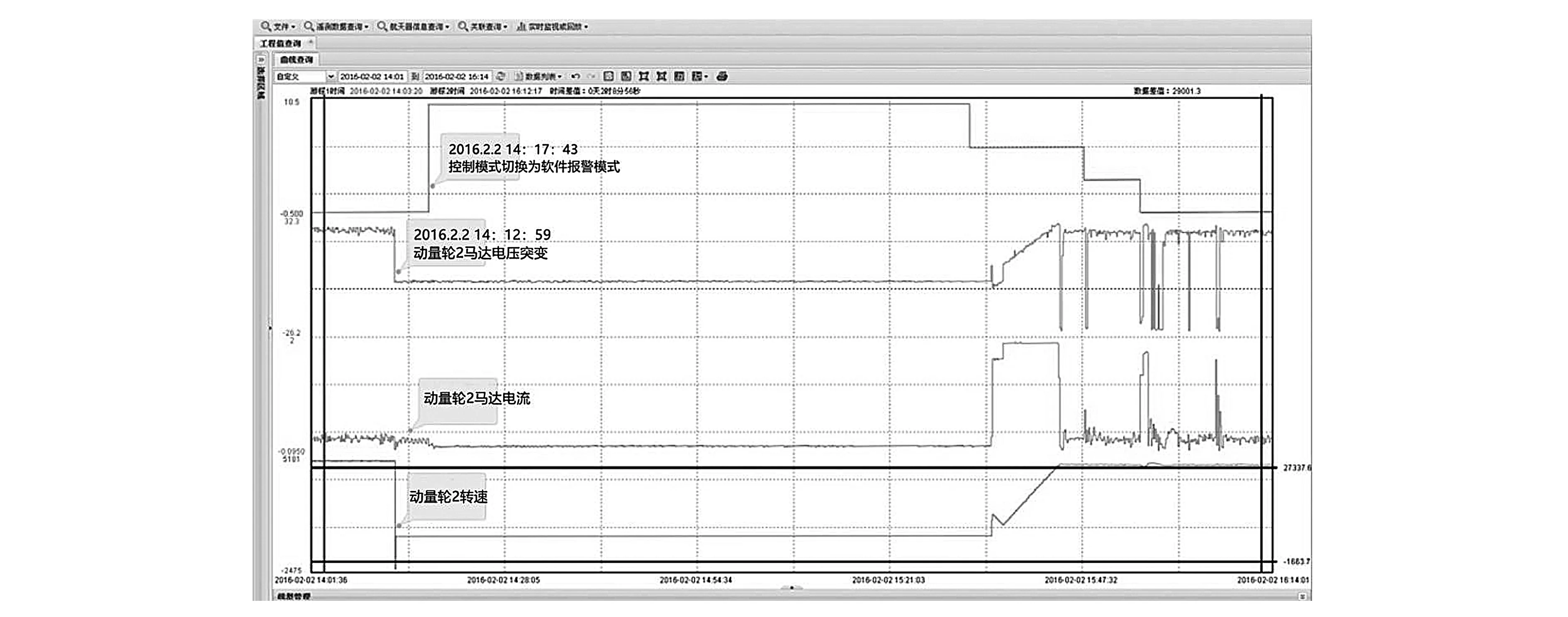
图2 动量轮2转速及马达电压遥测曲线
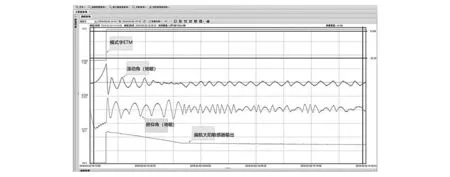
图3 软件故障报警模式下的卫星姿态
动量轮线路盒产品设计有过流保护电路,该电路包含辐射敏感器件。若动量轮线路盒遭受空间环境干扰,此时的辐射敏感器件由于空间单粒子事件发生输出误翻转,将导致过流保护电路误动作,遥测显示为动量轮电源状态为“断电”,转速遥测为“零”,与真正发生过流保护的情况是一致的。
在轨发生空间单粒子事件的可能性是始终存在的,因此在轨运行过程中可能由于单粒子事件导致过流保护电路中的辐射敏感器件误翻转。辐射敏感器件发生翻转后,将触发过流保护电路动作,切断动量轮组件供电通路上MOS管的输出,并引起过流保护电路误锁定,其最终现象表现为动量轮异常断电。因此,空间干扰极有可能是发生动量轮掉电故障的原因。
4 故障影响分析
4.1 姿态影响
动量轮2掉电后,卫星由正常模式转入软件故障报警模
式,这两个模式的指标精度如表1所示。
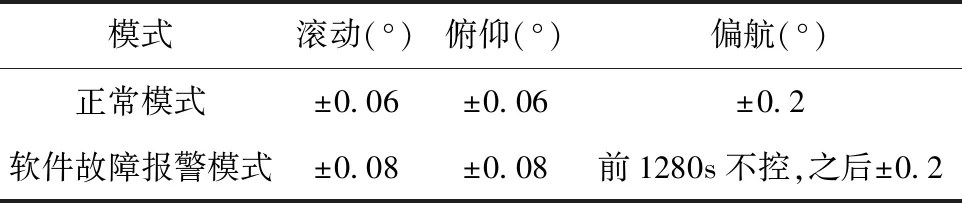
表1 正常模式和软件故障报警模式的指标精度
由图3可知,卫星因动量轮2掉电故障转入软件故障报警模式后,滚动和俯仰姿态误差只略微增加,但由于偏航轴在转入软件故障报警模式后1280s不控(此时间为陀螺加温时间),偏航轴误差达到33°左右,卫星的滚动和俯仰姿态未发生较大变化。
4.2 推进剂消耗影响
故障前后,推进系统各推力器喷气时间见表2。由表可知,卫星此次故障10N推力器共喷气295.61s,多消耗推进剂约1182.44g。

表2 卫星10N推力器喷气时间(单位:秒)
4.3 动量轮性能影响
卫星动量轮组件2再次启动后,升速过程中的动量轮马达电压、电流、转速曲线见图4。对该特征参数曲线进行分析可知,卫星动量轮2功能和性能正常。
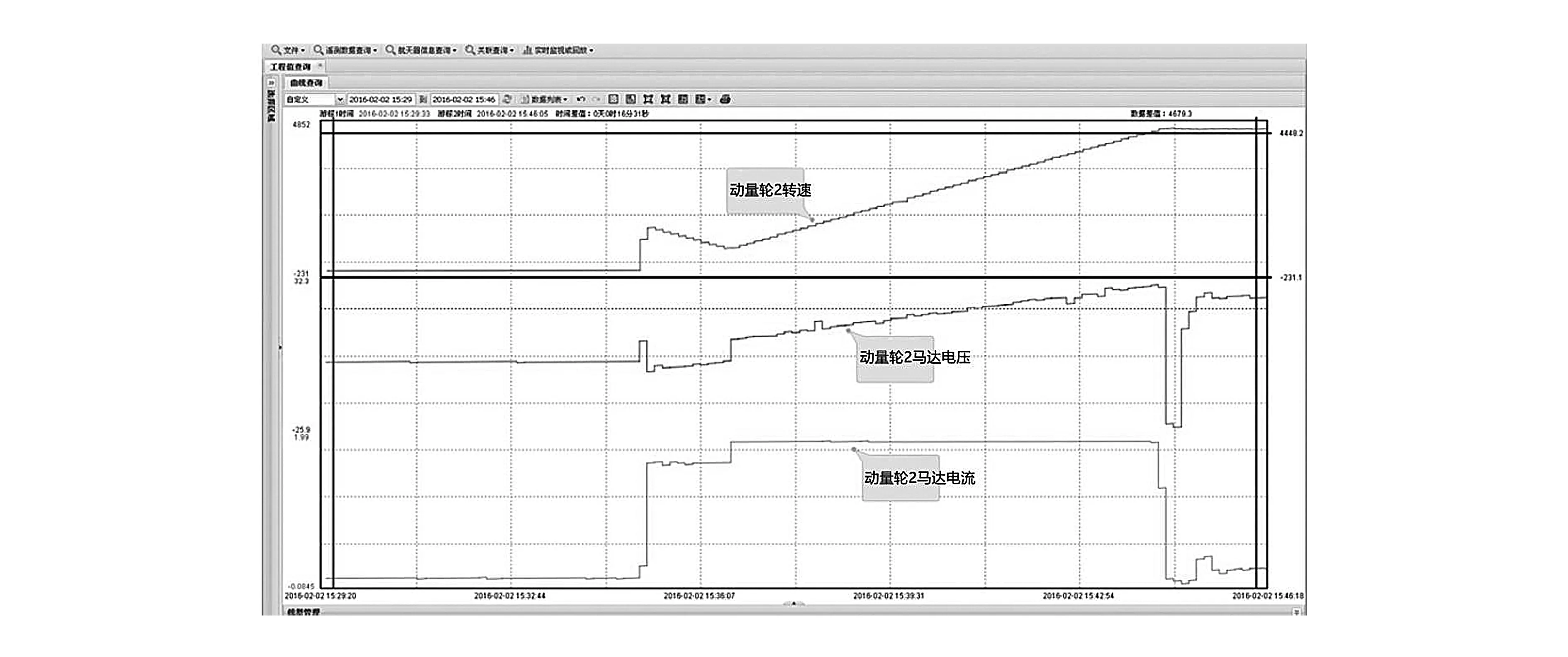
图4 卫星动量轮2重新加电后启动过程特征参数曲线
综上所述,卫星转入软件故障报警模式,其根本原因是动量轮组件2掉电引起卫星滚动轴姿态超差。从动量轮组件的转速、马达电压以及控制分系统供电部件PVC的输入电流、输出电压等遥测数据可知,动量轮组件2掉电的原因与其自身有关,与动量轮的供电情况和使用工况无关。从动量轮重新加电后特征参数遥测数据判断可知,卫星此次的动量轮异常掉电不影响动量轮本身的工作特性及性能。
5 解决措施
单粒子翻转是在轨卫星出现故障的常见原因。东四平台卫星同步轨道设计了软件故障报警安全模式,其是姿态长期超差软件报警后进入的对地指向安全模式,简称ETM。设计安全模式是为了在地面站介入之前星上先进行相关处理,争取更多的处理时间。
此外要研究如何提高卫星的可靠性,平时还需要关注的问题是:由于太空中的环境很复杂,而且卫星太阳能轨道的种类繁多,因此需要进一步做好对空间环境和单粒子效应的预示和防护措施。除了单粒子效应外,充放电效应也会为卫星的可靠运营带来安全隐患,这是亟待探索和研究的关键性内容。
为了增强和提高卫星在轨故障检测发现的实时性和定位精度的准确率,可设计一套对故障进行诊断与预测的管理系统。2016年,哈尔滨工业大学的陈天阳基于漏斗模型并结合DSP的制作工艺,建立了MOS器件的电荷收集机理,并计算出了单粒子效应的临界能量。基于SRIM软件对地面模拟福射试验中经常使用的锎源进行了仿真计算,得到了锎源的通量与能量的关系。采用锎源进行DSP处理器的单粒子效应地面模拟试验,通过分析大量的统计数据,得到了单粒子翻转截面、单粒子翻转个数与芯片距锎源距离的关系、每个地址上16个存储单元的单粒子翻转频率,试验研究结果可为我国通信卫星的空间单粒子效应安全防护管理措施的研究提供理论依据和技术指导[2]。
6 结 论
在卫星长期管理中,要重视卫星遥测的异常变化,对其变化原因要结合卫星相关遥测进行分析,不能孤立地看待每一个遥测。对于卫星测控要重视卫星模拟器的作用,对卫星出现的任何异常,都要在卫星模拟器上模拟分析各种可能性,从而有助于找出故障原因。
