基于创新方法的产品创新及机构组合理论体系研究
2022-01-19李春明崔运静
李春明,刘 庆,崔运静,刘 晓,孙 凤,曹 惠
(1.中国石油大学(华东)机电工程学院,山东 青岛 266580) (2.山东石油化工学院机械与控制工程学院,山东 东营 257061)
创新是社会发展的原动力,在我国双创(大众创业、万众创新)的大背景下,创新方法理论体系的补充与完善对于促进和指导创新活动具有重要意义。网络化的普及推动了制造业的创新与发展。制造业与互联网结合的本质是将制造业、“互联网+”和双创背景紧密结合,从而优化产业结构、改善供给、释放和发展新动能、促进制造强国建设[1]。其核心理论的支撑是创新方法。创新方法在各高校均受到重视,各专业的课程均体现了对创新的重视[2-3]。本文在文献[4]的基础上,补充并完善通用创新方法、产品创新方法、机械组合方法的理论体系。
1 创新方法的四层结构体系
创新方法按照适用范围的级别可分为以下4个层次:
1)心理活动。联想、想象、克服思维定势、利用记忆的特点和挖掘创新想法等均以潜意识理论[5]为基础指导创新活动。阻碍创新的四大陷阱分别是大意、轻信、贪婪和浮躁。因此,在开展创新活动时要特别注意:培养细心观察及留意平常事件的习惯;坚定掌握第一手资料及追本求源的态度;提升淡泊名利及敢于坐冷板凳的境界;保持全力以赴、水滴石穿和脚踏实地的风格。
2)通用创新技法。指适合于各行各业各领域的创新方法。当明确了需要创新的问题之后,采用一些套路性技法对于提高创新速度及丰富创新成果具有积极的推动作用。
3)某一领域的创新方法。该层次的创新方法往往带有上面两个层次创新方法的影子,如基于想象的小人法[6]。随着社会的发展,改革成为各领域的重点研究问题。在政策制定、调整和完善上,也往往需要创新方法[7-8]。一些领域也逐渐形成了创新方法理论体系[9],如机械产品。
4)具体研究对象的创新方法。该层次的创新方法适用于机械、机构、洗衣机、微波炉等硬产品的创新,也适用于法规、章程、措施、政策等软产品的创新。
每个层次的创新方法都是下面几个层次创新方法的基础。
2 通用创新方法
通用创新方法可总结为以下6个方面。
1)移花接木法。特点是“用它山之石攻玉”,包括换元法、移植法和类比法等。
2)博采众家法。特点是“博采各家之长”,包括穷举法、集智法和组合法等。
3)捕捉灵感法。特点是“正确运用思维技巧”,包括观察法、提问法、多向法和放手法等。
4)转移阵地法。特点是“以退为进,在核心问题周围开展研究”,包括回源法、攻心法和简化法等。
5)移山填海法。特点是“获得别人的智力支持而完成自己的创新”,包括正确判断别人而吸取创新点的判谎法、使团队成员更好地工作的借智法和使合作者鼎力相助的协调法等。
6)惩前毖后法。特点是“分析与利用创新失误”,包括鉴误法、靶向法和指针法等。创新失误是指没有获得预期的创新结果。创新活动的探索性决定了创新失误的可能性。运用鉴误法可将失误经验当成财富,使失误的经历成为指向成功的路标,在哪里跌倒就在哪里站起来,然后寻求更适宜的探索途径。爱迪生进行了几千次灯丝材料的失败试验,确定了大量不适用的材料,最终发明了灯泡。运用靶向法可立足于实际而保证创新成果获得社会的承认和回报。创新成果必须与当时的社会需求相一致,否则会无人问津。1931年,英国的艾伦·道尔·卢布姆林申请了立体声技术的专利。1954年该专利失效两年后,市场上开始出现立体声唱片和放音设备。今天,这项技术已经普遍用于各种音响设备,为全世界带来欢乐,但是,专利申请人及其公司未能从中获得丝毫回报。运用指针法可基于基本的科学规律而避免脱离科学轨道,不使努力白费。要在创新过程当中不断地结合基本科学规律,做到定性分析与定量分析相结合,先用科学原理明确方向,再用专业知识努力工作,当遇到难题时,再用科学原理审视研究方向。
7)丰富理论法,如实践法、补漏法等。
在文献[4]基础上补充的方法主要有攻心法、简化法和放手法。
攻心法不作技术上、理论上或方式上的创新与改进,而是根据人的潜意识能影响人的意识和行为的原理,充分考虑消费者、设计者和交谈者的心理,通过产品的外形、色彩、包装、广告词等影响其潜意识,使其接受[10]。
简化法通过提炼要点、化整为零和降低难度等方式将复杂问题转化为简单问题。TRIZ(发明问题的解决理论)的最终理想解是简化法的主导思想。使用该方法的有以下实例:
1)圆珠笔芯因磨损而漏油。创新:限制油量,使基于当时制造技术所生产的笔尖在磨损之前会因用完了油而不存在漏油问题。
2)计算机读写设备的设计问题。创新:逐渐简化机械设备,出现了选数器、穿孔卡片、穿孔纸带、磁鼓存储器、硬盘驱动器、光盘和软盘驱动器等。
3)计算机便携式存储设备的设计问题。创新:逐渐增大容量比,出现了软盘、光盘、移动硬盘、U盘等。
4)1980年,手表的制造成本大且价高。创新:以塑料模块代替机械零件,使零件数由150减到51,制造成本随之减半,使降低手表价格成为可能。
5)力学理论问题。创新:作一些可接受的简化假设,然后采用数学手段推导出关系式,比如流体力学的雷诺方程和结构力学的有限元法等。
3 产品创新方法
产品创新方法主要有以下4个方面:
1)基于穷举法和组合法的功能实现法,包括功能分解、实现方式列举、方案筛选和评价等[8]。
2)TRIZ利用4法。①基于技术系统九大进化法则、最终理想解、发明问题的解决算法和科学知识库等的创新切入点确定法。②基于穷举法的技术冲突矩阵法[11]。③基于穷举法的物理矛盾分离法。④基于换元法的工艺系统物场分析法。
3)反向设计法。反向设计是以先进技术或产品的实物、软件(图纸、程序、技术文件等)和影像(照片、广告等)作为研究对象,探索并掌握其关键技术,然后开发出同类型创新产品的设计。该设计可使产品研制周期缩短40%以上,并可实现高起点创新。只复现原产品的功用可以打破外国对市场的垄断。如果有技术突破和提升,则可开发出更有竞争力的创新产品。日本的电器多数都是以“引进—提高—外销”模式发展起来的。
4)以点带面的方法。局部的创新也可形成新产品。①基于换元法的资源分析法,如电动车与汽车的动力源不同,其传动和操纵系统均有很大的创新空间。②运动协调设计法,机构各构体之间的运动协调设计可获得更高效、更轻便和更经济的机器,如自动化生产线上的各机械手。
由一个物体的运动获得其他物体的运动,并且各物体运动之间存在确定的关系,这种运动称为机械运动。机器是执行机械运动的装置,具有代替或减轻人类劳动、提高劳动生产率等功能。机构是机器的理论模型。机械是机器和机构的总称,指执行机械运动的装置及其理论模型。机械原理以理论力学和多(刚)体系统动力学为基础,研究机构的组成、运动特点、运动学和动力学等问题。机械设计以材料力学和弹性力学为基础研究机器的强度、刚度、稳定性、材料、受力、变形、承载等问题,包括设计新机器和改造旧机器两个方面。机械产品的创新最具实用价值和经济价值。
4 机构组合的创新方法
构体(构件)是机构(机器)中的运动单元。各构体之间的连接部分称为运动副。在机构当中,构体是刚性的,可抽象为由各运动副元素刚性连结而成的体。作平面运动的构体有3个自由(独立运动),两个相互垂直方向上的移动和一个转动。一个构体相对于另一个构体转动,则被约束住俩移动自由,两者之间的运动副为转动副。一个构体相对于另一个构体移动,相当于绕无穷远处转动,则被约束住一个移动自由和一个转动自由,两者之间的运动副为移动副。转动副和移动副属于二约束副。一个构体相对于另一个构体滚滑,则被约束住垂直于滚滑方向的移动自由,两者之间的运动副为滚滑副,属于一约束副。纯滚动副属于二约束副。有两个及两个以上转动副的构体称为杆(如曲柄、摇杆、连杆和多副杆等),有一个转动副的构体称为块(如滑块、导杆和摇块等),没有转动副的构体称为板(如十字滑块)。基于以上分析,如图1所示的平面机构自由数(自由度)Fn的计算公式为:
Fn=3n-2P2-P1=3×5-2×6-1×2=1
(1)
式中:n为活动构体数;P2为二约束副数;P1为一约束副数。如果将构体3处的虚约束去掉,则引入齿轮上下运动的自由。
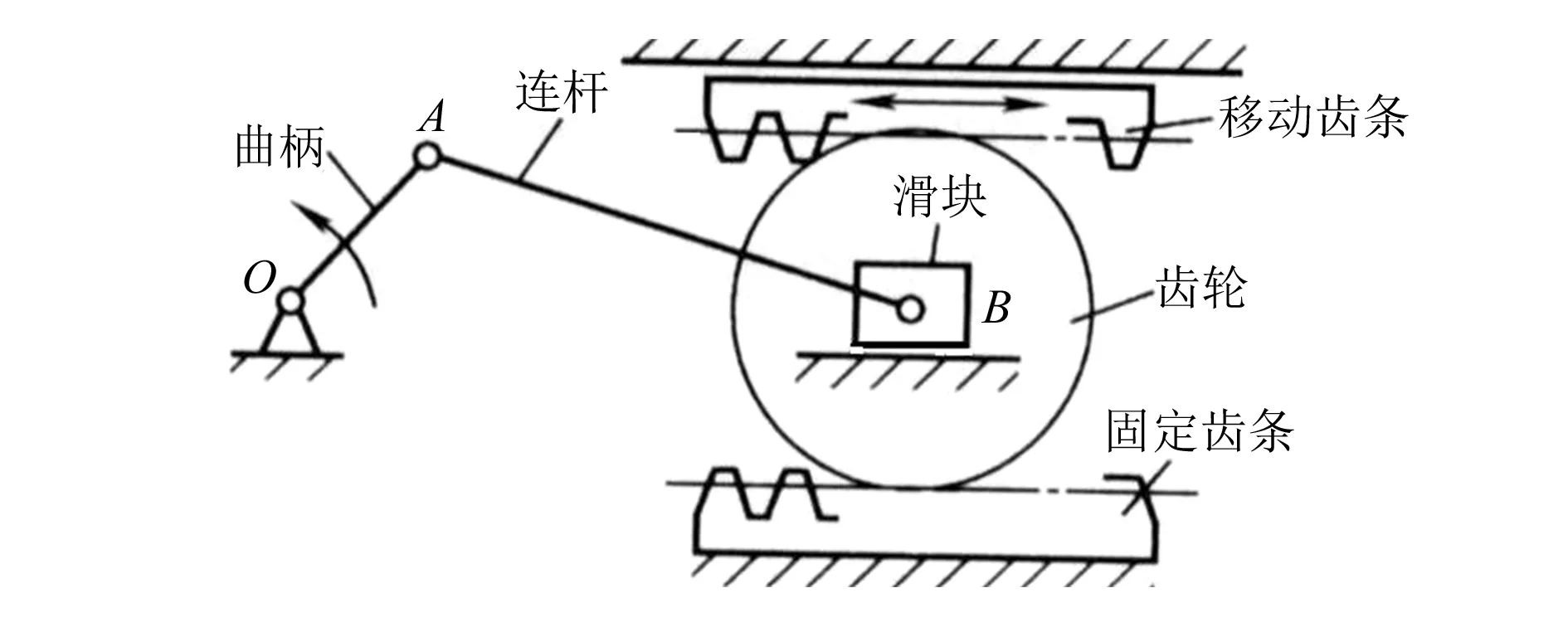
图1 平面机构
以平面四杆机构为基本机构,将一个活动构体及两端的俩转动副以滚滑副替代(一副三代),则演化出凸轮机构或齿轮机构;将一个构体以可伸缩柔体替代并将两端转动副放大为纯滚动副,该柔体相当于2个以转动副连接的构体链,则演化出带传动机构,具有2个自由,主动轮匀速转动时,从动轮转速随载荷的变化而变化;将一个构体以挠性体替代并将两端转动副放大为纯滚动副,该挠性体相当于3个以转动副连接而成的构体链,且中间构体以转动副与固定体相连接,则演化出链传动机构,具有1个自由;构体环上增加1个构体、增加运动副的1个自由或解除固定体的1个约束,则演化出俩自由机构。
将多个基本机构按照一定的规则组合起来称为机构组合。主要有以下4类形式:
1)串连式。前置机构的某个输出为后置机构的输入,两者有一对体固结(图2(a)),如牛头刨床的动力主机构。

图2 4类机构组合方式
2)并连式。俩基本机构的运动具有并连的形式,共有一对或多对体固结。协调运动双滑块的驱动机构为分解式(图2(b)),2个主动体固结。压缩机的双螺杆滑块驱动机构为固结式(图2(c)),2个从动体也固结。图2(d)为独立式,2个机构只有固定体相固结。图2(e)为一体合成式,具有2个主动体。飞机的双缸襟翼操纵机构为二体合成式(图2(f)),也具有2个主动体。
3)封闭式。基础机构有俩自由,附加机构有一个自由。两者有2对构体相固结。图2(g)可称为平动式,如齿轮连杆步进转角机构。如果主动体为左边转动体,则可称为被动式。如果主动体为右边转动体,则可称为主动式。
4)装载式。楫机构的机架(固定体)与舟机构的一个活动构体相固结(图2(h)),如挖掘机工作机构。
上述组合形式适用于2个组合机构及演化机构的组合。
每增加一个基本机构就增加一倍该机构的自由数,每固结一对活动构体就减1。这是计算复杂机构自由数的一个新算法。
5 结论
1)四层创新技法的结构体系为新方法的研究提供了较清晰的空间。
2)机械原理侧重于理论,机械设计侧重于实践。两者的概念均应与基础学科相一致,更应与语言的语义相一致。
3)机构创新方法包括组合、演化、穷举、宽泛等。机器创新方法包括整体和零件创新[12]等,本文完善了机构组合法。
