求解最小包容球问题的一类光滑逼近算法
2022-01-19柏雪婷
李 尧, 蒋 毅*, 柏雪婷
(1.四川师范大学 数学科学学院,四川 成都 610066;2.四川师范大学 可视化计算与虚拟现实四川省重点实验室,四川 成都 610066)
在Rn空间中,令闭集合
Bi∶={x∈Rn:‖x-ci‖≤ri,i =1,2,…,m},它是以ci为球心,ri≥0 为半径的球.给定一组球

最小包容球问题是找一个能够包容B 中m个球且半径最小的球,简称SEB 问题.该问题可以表述为非光滑凸优化问题
由于函数f(x)是严格凸的,所以问题(1)的解存在且是唯一的.
最小包容球问题应用于位置分析、军事行动等方面,它本身也是计算几何学中的一个有趣的问题[1-5].当维数n≤30 时,文献[5-7]中的方法在理论和数值实验中都能得到令人满意的结果;然而,这些方法在处理维数n >30 时的效率比较低下.
近年来,许多学者考虑n ≥100 的情况.Pan等[8]首先将具有一定组合性质的问题(1)转化为一个包含极大值函数φ(t)=max{0,t}的确定非光滑问题,然后使用CHKS 光滑函数[9-10]来逼近φ(t),由此建立了一个全局收敛的拟牛顿算法.Zhou等[11]利用对数指数光滑逼近[12]的思想提出了一种有效求解最小包容球问题的算法.基于此类方法的启发,本文提出了一类光滑逼近算法.
在本文中所有向量都是列向量.设Id表示d ×d单位矩阵,co(S)是集合S⊆Rn的凸包.对于凸函数f:Rn→R,∂f(x)表示f在x处的次微分.
1 光滑逼近
首先,问题(1)中的f(x)可由线性优化问题重新定义如下:

问题(3)满足强对偶定理,对于任意x∈Rn,其最优值与对偶线性规划的最优值相同.因此,有

其中,ω和ui是与约束和λi≤1(i =1,2,…,m)相关的拉格朗日乘子.由于

且ui≥0,令

将上式代入(4)式的目标函数,消除变量u,可以得到

因此,原问题(1)转化为了非光滑优化问题,具体如下:

因为φ(fi(x)+ω)是不可微的,所以本文利用光滑函数对其进行逼近.应用的光滑函数如下:

文献[13-14]证明函数φ(t;p)满足如下性质.
引理1.1对任意p∈(0,1],函数

满足:
(i)φ(t;p)是严格凸的可微函数,且
根据光滑函数φ(t;p),定义如下函数

下面考虑光滑无约束优化问题

首先,证明函数Φ(ω,x;p)的相关性质.
引理1.2问题(8)中定义的函数Φ(ω,x;p)具有以下性质:
(a)对任意ω∈R,x∈Rn和0 <p1<p2,则

(b)对任意ω∈R,x∈Rn和p >0,则

(c)对任意p >0,Φ(ω,x;p)是连续可微且严格凸的.
证明(a)对任意p >0,t∈R,有

又因为fi(x;p)随p 严格增加,对于任何0 <p1<p2,则有
(b)经过简单的计算,可以得到

对任意ω∈R,x∈Rn和p >0,由上述等式可推出如下不等式关系成立:
上述2 个不等式相加,可以得到

又根据Φ(ω,x;p)的定义得

故不等式

成立.
(c)对任何p >0,显然Φ(ω,x;p)是连续可微的.下面证明Φ(ω,x;p)是严格凸的,由(8)式可得

由(10)和(11)式得
其中第一个不等式是由λi(ω,x;p)的非负性和▽2fi(x;p)的表达式得到的,第二个不等式是由Cauchy-Schwartz不等式得到的.这表明对任意p >0,Φ(ω,x;p)是ω和x的联合严格凸函数.
2 光滑逼近算法
由引理1.1 和1.2 可知问题(8)是问题(6)的光滑逼近.因此,给出如下光滑逼近算法.
算法A步骤1令σ∈(0,1),(ω0,x0)∈R×Rn,∊1,∊2>0 和p0>0.
步骤2k 取值0,1,2,…,序列(wk,xk)按如下方式产生:使用有限内存BFGS 算法求解光滑无约束优化问题

得到相应的最优解记为(ωk,xk),且满足

步骤3若pk≤∊1,则停止计算,输出(ωk,xk);否则,转步骤4.
步骤4令pk+1=σpk,更新k ∶=k+1,转步骤2.
算法A采用有限内存BFGS方法求解问题(12),它能有效地求解维数较大的最小包容球问题.接下来,将证明算法A的收敛性以及求出的最优解就是问题(1)的最优解.
引理2.1设{ωk,xk}k≥1为算法A 产生的点序列,则{xk}k≥1的极限点为问题(1)的最优解.
证明设{ω*,x*}为{ωk,xk}的极限点,并假设当k→+∞时,{ωk,xk}→{ω*,x*}.由于{ωk,xk}是问题(12)的解,则

此外,由(1)和(6)式,可以推断出
定义指标集如下:

由(15)式,fi(x)和max{0,t}的连续性,可以得到



由(14)式可以得到

则(18)和(19)式表明
0∈co{∂fi(x*),i∈I(x*)}=∂f(x*).从而,x*是问题(1)的最优解.因此,要完成引理2.1的证明,只需要证明(20)式成立.
首先,由(17)式可以很容易地推断出

现在,分别考虑|I(x*)| =1 和|I(x*)| >1 的情况,其中| I(x*)|表示集合I(x*)中的元素个数.
情形1如果|I(x*)| =1,则假设

由(21)式可以推断出,对于足够大的k,有

结合λi(ωk,xk;pk)的定义有
又由(13)式可以得到

由(23)和(24)式可以得到(20)式成立.
情形2如果|I(x*)| >1,则很容易证明(21)式严格成立,即

否则,一方面有

另一方面,(17)式表明


它表明(20)式成立.因此,引理2.1 的证明完成.
定理2.2设{xk}为算法A产生的点序列,如果x*是问题(1)的唯一最优解,则
证明对于任何k≥1,通过引理1.2 和算法A,可以看出

由f(x)是强制的,可知水平集

是有界的.结合(26)式,有{xk}⊂L.因此,{xk}在Rn中有界.如果x*是问题(1)的唯一最优解,则引理2.1 表明

3 数值实验
下面给出数值实验结果.使用Core i7 2.4 GHz个人电脑,在Matlab 环境下,运用算法A 和文献[8]中的算法求解最小包容球问题.算法中的参数定义如下:

采用文献[8]的随机序列


球的半径ri和球心ci(i =1,2,…,m)依次设置为,…,顺序如下:

初始点设为ω0=0 和x0=0.
数值结果汇总在表1 和表2 中,欧几里德空间的维数和球的个数分别用n 和m 表示,平均CPU时间用时间(单位:s)表示,平均迭代次数用迭代次数(单位:次)表示.
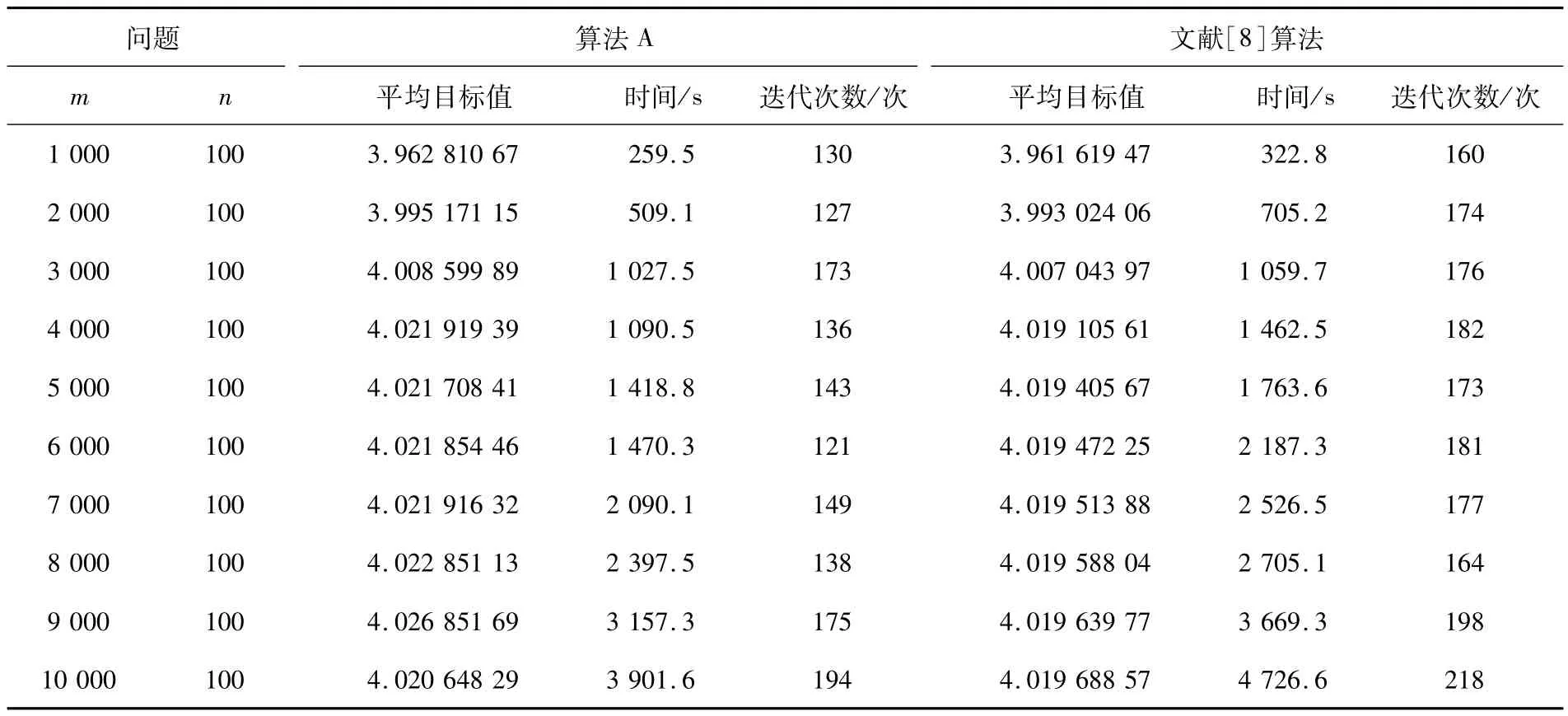
表1 n固定时,算法A与文献[8]中算法的比较Tab.1 Performances of Algorithm A and that used in reference[8]with fixedn

表2 m固定时,算法A与文献[8]中算法的比较Tab.2 Performances of Algorithm A and that used in reference[8]with fixedm
对于每对(m,n),用437、441、445、449 和453代替整数445,对(27)式中产生的5 组数据分别运行本文的算法.表1 和表2 中的结果均取平均数.当球的个数m 增加时,本文所给算法A 的平均CPU时间比文献[8]中的算法快的优势越明显,并且当维数n增加时,算法A具有同样的优势.
与文献[8]中算法相比,算法A有2 个优点:一是在处理的数据逐渐增大时,算法A具有计算的速度优势;二是它的迭代次数比文献[8]中的算法要少.因此,本文所给的算法A 对于求解最小包容球问题是有效的.
