电励磁直线同步电动机磁悬浮系统H∞鲁棒控制的研究*
2022-01-19蓝益鹏张明慧
蓝益鹏 张明慧
(沈阳工业大学电气工程学院,辽宁 沈阳 110870)
传统数控机床采用“旋转电机+滚珠丝杠”的驱动系统,由于存在中间传动装置,不能够满足现代工业所要求的高加工精度[1]。
较传统电机而言,直线电机没有中间传动环节、没有冲击、响应速度快、磨损和噪声小,但是运动平台和导轨之间存在较大的摩擦[2-4]。将电励磁直线磁悬浮同步电动机作为数控机床驱动系统,其水平方向产生的推力和垂直方向产生的悬浮力使电动机实现直线进给和稳定悬浮,改善平台和导轨间的摩擦。
但是电励磁磁悬浮直线进给平台系统具有较强的不稳定性,且在受到不确定性扰动或者端部效应等影响时,其参数也会发生变化,极大地增加了控制难度[5]。因此既要保证零传动,又要实现高效、可靠的控制性能,是系统控制器的设计难点[6]。
H∞鲁棒控制主要为了解决被控对象的不确定性扰动的问题,通过设计H∞鲁棒控制器可以使系统有更好的稳定鲁棒性和品质鲁棒性。
正是如此,H∞鲁棒控制也被许多学者相继研究。文献[7]设计了一种在非线性系统中执行器失效时H∞鲁棒控制系统,但是它的抗扰能力和容错能力有一定的范围。文献[8]提出混合H2/H∞鲁棒预测控制器设计方法,使永磁同步伺服电机系统负载变化时起到更好的抑制扰动的作用和稳定性。文献[9]则是基于线性矩阵不等式(LMI)设计了鲁棒H∞滑模速度控制器和电流控制器,该控制系统能够很好的抑制不确定性的外部扰动。
针对电励磁直线电动机的磁悬浮系统,本文提出一种磁悬浮系统H∞鲁棒控制方法,对电励磁直线同步电动机悬浮系统方向的状态空间模型进行线性化,将系统对扰动的不确定抑制问题归为H∞控制问题,通过解Riccati不等式的正定解,得到悬浮系统的H∞鲁棒控制器,并对其进行仿真研究。
1 电励磁直线电动机的结构和运行机理
电励磁直线电动机磁悬浮进给平台主要由运动平台,电励磁直线同步电动机与辅助导轨组成。如图1所示。
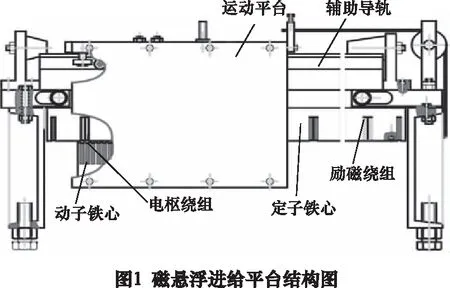
从图1可知其运动平台主要为两部分:动子部分和定子部分。
(1)动子部分:动子铁心和电枢绕组。在三相交流电的作用下,电枢绕组产生电枢磁场,从而产生电磁推力,推动平台运行。
(2)定子部分:定子铁心、励磁绕组、辅助导轨以及端座组成。在直流电的作用下,励磁绕组产生励磁磁场,从而铁心在磁场的作用下受到垂直向上的吸引力,吸引力与运动平台重力相当时,可保证电机的稳定悬浮。
2 电励磁直线电动机的数学模型
2.1 数学模型
在d-q轴坐标系下的电压方程和磁链方程[10-11]。
电压方程:
(1)
其中:ud、uq为电枢绕组d、q轴的电压分量;uf为励磁绕组的电压;id、iq为d、q轴的电流分量;if为励磁绕组电流;rs为电枢绕组电阻,rf为励磁绕组电阻;v为运动平台的运动速度,为极距;ψd、ψq为d、q轴的磁链;ψf为励磁磁极磁链分量。
磁链方程:
(2)
其中:Lmd、Lmq为直轴与交轴的主电感;Lσ为电枢绕组漏感;Lσf为励磁绕组漏感。
由电压方程和磁链方程可将电励磁直线电动机悬浮系统的数学模型描述为:
磁悬浮力方程:
(3)
(4)

(5)
悬浮方向的运动方程:
(6)
电压方程:
(7)
式中:m为运动平台的重量;δ为运动平台实际悬浮的气隙高度;fy为不确定性扰动;K1是磁悬浮系数,K1=5.659×10-6。
(8)
从式(8)可看出存在状态变量之间的非线性。即电励磁直线电动机磁悬浮系统是一个典型的非线性系统,由线性化后的线性模型可得到描述系统H∞鲁棒控制的状态空间模型。
2.2 模型的线性化
磁悬浮系统的模型线性化[13]:在系统平衡工作点对模型进行线性化,用泰勒公式在平衡点展开,忽略二阶以后的高阶项,从而得到一阶数学模型,再采用传统控制策略对其进行控制,借此取得良好的控制效果。所以本文在平衡点(i0,δ0)附近对磁悬浮系统进行线性化处理[14]。
Fy(i,δ)=Fy(i0,δ0)+KδΔδ+KiΔi
(9)
(10)
(11)
其中:
(12)
由式(9)~(11)可得
(13)
(14)
(15)

(16)

(17)
其中:A、B1、B2矩阵分别对应于式(16)中简写之后的矩阵;y为输出,即观测量等于系统的状态变量;z为评价函数;C1和D12为加权系数矩阵;u为输出;w为干扰。
3 H∞鲁棒控制器的设计
由式(16)知磁悬浮系统具有不确定性的扰动。这种不确定的扰动在磁悬浮伺服系统中,将会降低磁场定向的精度,影响控制系统稳态和动态性能。为解决被控对象的不确定性扰动的问题,采用H∞鲁棒控制,所以接下来将对电励磁直线电动机进行H∞鲁棒控制器的设计。
设系统增广被控对象的状态空间描述为
(18)
z=C1x+D12u
(19)
且rankD12=p,(A,B2)可稳定。即
(20)
由此设计悬浮系统状态反馈控制器
u=Kx,K∈Rp×n
(21)
定理1[15]:对于给定的γ>0,存在状态反馈矩阵K使得闭环系统(20)和(21)内部稳定且
‖Tzw(s)‖∞<γ
(22)
成立的充分必要条件是存在正定矩阵X>0满足Riccati不等式

(23)
如果上述不等式有正定解X>0,则使闭环系统稳定且式(22)式成立的反馈阵由下式给出
(24)
由式(16)可知增广被控对象中A、B1、B2矩阵分别为
(25)
(26)
(27)
加权系数矩阵C1和D12为:
(28)
(29)
式(28)和(29)中:q1、q2、q3、ρ为待取的加权系数。

所以由式(12)可计算得到
(30)
经过反复取试,C1和D12选择如下:
(31)
(32)
之后利用MATLAB解Riccati不等式(23),可得:
再由式(24)可以得到控制器的参数K如下所示:

(34)
4 仿真研究
电励磁直线电动机控制系统的仿真框图如图2所示,系统的位置环节是H∞鲁棒控制器,电流环用的是传统PI控制器。

EELSM参数:电枢电阻Rs=1.2 Ω,直交轴电感Ld=Lq=0.018 74 H,直轴主电感Lmd=0.095 H,极距=0.048 m,极对数Pn=3,电机动子以及平台质量M=10 kg,励磁电流if=5.7 A。
用Simulink对所提的控制策略进行仿真研究,并与PI控制器进行对比。
(1)电励磁直线同步电动机磁悬浮系统起动性能。
如图3为电动机磁悬浮系统起动时的气隙高度响应曲线。由图可以得出:磁悬浮系统采用PI控制时,大约0.138 4 s稳定在系统给定气隙高度,上升时间tr约为0.002 537 s,稳态误差ess约8×10-7m,没有超调;磁悬浮系统采用H∞鲁棒控制时,大约0.072 46 s达到稳定值,上升时间tr约0.002 535 s,没有稳态误差,没有超调。如图4,磁悬浮系统采用H∞鲁棒控制时,励磁电流到达稳定比PI控制系统所需时间较短。由上述可得,H∞鲁棒控制较PI控制系统来说,其到达稳定时间,上升时间,系统响应速度都比较快,动态性能和稳态性能都很好。


图5为悬浮系统起动时高度误差曲线,从图中可以看出起动时PI控制的系统误差为2.531×10-7m,H∞鲁棒控制的响应速度快,系统误差几乎为0 m,可忽略不计。

(2)电励磁直线同步电动机磁悬浮系统抗扰性能。如图6和图7,在0.3 s处突加15 N阶跃扰动,之后在0.6 s去掉扰动,观察其抗扰动性能。
如图6为阶跃扰动时气隙高度曲线,从图6中可以观察出悬浮系统采用PI控制时,气隙高度动态降落较大,大约6.0×10-5m,再次恢复到给定高度时间约为0.172 8 s;系统采用H∞鲁棒控制时,系统气隙高度降落约为1.6×10-5m,恢复到给定高度时间约0.05 s。由此可见H∞鲁棒控制控制系统时,系统的抗扰性能更好。
图7为阶跃扰动时悬浮系统励磁电流曲线,由图7可以看出:PI控制时,加扰动之后,系统电流恢复时间约为0.02 s,且抖振较大;H∞鲁棒控制加扰动之后系统电流恢复时间0.003 2 s,抖振较小。通过比较两种控制方法,H∞鲁棒控制抗扰动性能更好。


(3)电励磁直线同步电动机磁悬浮系统对端部效应的抗扰性能。用正弦函数f=15sin(20t)N来模拟端部效应,在0.3 s处加入正弦扰动,观察系统的抗扰能力。
图8是悬浮系统加入正弦扰动时的气隙高度曲线。由图8可看出:系统采用PI控制在加正弦扰动后,振荡比较大,抗扰能力差;采用H∞鲁棒控制的系统没有明显的振荡,跟随性能较好,抗扰能力较PI控制有明显的优越性。
图9是悬浮系统加入正弦扰动时的气隙高度误差曲线。从图9中可以观察出PI控制的高度误差很大,且加入正弦扰动之后波动较大;而H∞鲁棒控制则气隙高度误差很小,并且扰动之后几乎没有波动,有较好的抗扰能力。


5 结语
针对电励磁直线电动机磁悬浮系统,为提高其抗扰性能,提出一种H∞鲁棒控制策略,得到结论如下:
(1)对EELSM的结构和悬浮系统的悬浮机理进行分析,由于电枢绕组交轴电流产生的磁场对定子铁心的吸引力是随负载的变化而变化的,具有不确定性,将其作为扰动处理之后,从而可得到含有不确定性扰动的磁悬浮力方程,进一步推导出磁悬浮系统的运动方程。
(2)针对推导所得而建立的系统状态空间方程具有非线性,采用平衡点线性化的方法进行线性化处理,得到线性状态空间方程。
(3)对磁悬浮控制系统中存在扰动的不确定性,提出用H∞鲁棒控制策略抑制系统扰动,同时仿真结果表明H∞鲁棒控制策略使系统具有更好的抗扰效果。
