舰船噪声 DEMON 线谱的机器自动识别与轴频提取研究
2022-01-19靳登攀
靳登攀
(海装装备项目管理中心,北京 100071)
0 引言
水中目标识别是被动声呐与海洋环境监测领域的关键技术。舰船辐射噪声是目标识别的信号源。国内外学者开展了大量研究,力求通过舰船噪声实现舰船类型与状态的准确识别[1-5]。舰船辐射噪声源可分为3大类:机械噪声、螺旋桨噪声、水动力噪声。在高出临界航速时,螺旋桨噪声是主要的噪声源。螺旋桨噪声中既有宽带连续谱、窄带线谱,又有幅度调制分量[6]。宽带连续谱是由螺旋桨转动而引起的空化噪声,调制分量为轴频、叶频及其谐波对空化噪声的幅度调制,往往调制在数百~数十千赫兹的宽频段上。通过解调处理计算出的调制谱中通常存在着若干离散线谱,其位置对应螺旋桨的轴频、叶频及其谐波。利用这些离散线谱估计螺旋桨的轴频和叶片数,为被动目标检测和分类识别提供了有力的工具。随着水下无人系统的发展,自主与智能技术越来越受到重视。目前舰船噪声分类识别领域提取的线谱、解调制谱与倒谱等特征,多属于收集信号后人为的分析。
对于长期无人值守的海洋环境监测等无人系统,通过舰船辐射噪声自动识别与提取DEMON谱中的线谱,并自动提取轴频与叶片数,对于自主目标识别具有重要价值。本文主要研究机器自动识别线谱与提取轴频的方法。
1 舰船噪声调制与解调原理
舰船噪声可表示为图1所示的模型[7]。
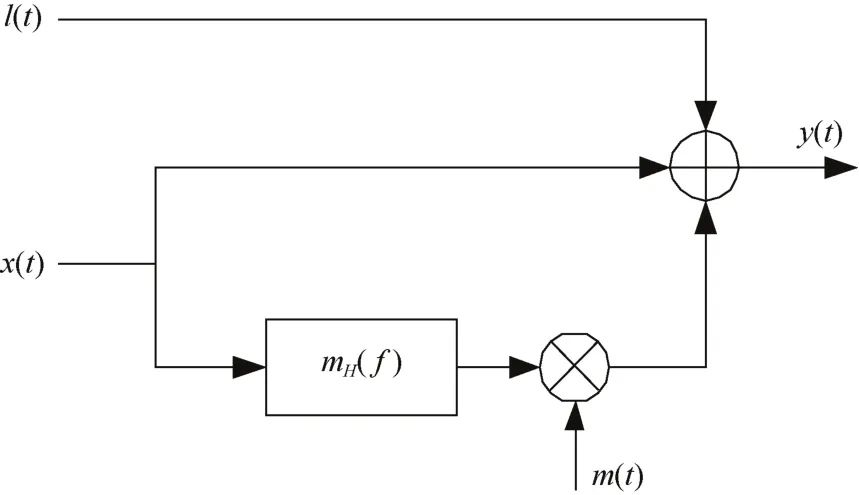
图1 舰船辐射噪声模型Fig.1 Model of ship-radiated noise

式中:l(t)表示初相随机的正弦信号,它反映了舰船周期性旋转机械发出的线谱;x(t)表示平稳高斯各态历经的随机过程,它表征了舰船噪声连续谱;m(t)≤1表示慢变化周期调制函数,它的频率远低于x(t)的中心频率,反映了螺旋桨周期性转动对螺旋桨噪声的调幅作用;mH(f)称为调制深度谱,反映了螺旋桨周期性调制在频域上的不均匀分布。在所研究的某一频带内,可认为mH(f)是一个常数,可并入m(t)中。于是式(1)变为

式(2)等号右边,表征线谱的第1项频率较低,表征包络谱的第1项频率较高,可通过解调制信号处理方法分析。
不失一般性,可定义:

式中:w0为调制轴频;An,θn分别为轴频的n次倍频调制分量的调制幅度和初相位。
上式中调制信号m(t)携带目标信息,对s(t)进行解调制处理可以得到它的功率谱,即所谓的DEMON谱。常用的解调制分析方法有平方检波法、希尔伯特变换法、小波变换法与非线性算子法等。
平方检波滤波法解包络的原理如下:对于式(2)中的调制信号,为了方便理论推导,先不考虑直接辐射的线谱与噪声分量,并设调制波为m(t)=asinΩt,载波为单频x(t)=cosωt,得:

对输入信号做平方运算,并滤去ω的高阶谐波项,可得:

其中,低通滤波的截止频率Flpf满足下述关系:

从式(6)可以看出,通过低通处理,可以获得调制频率的基频和二次谐波分量。这里是以单频调制波为例分析的,对于式(3)的谐波调制,解调后获得基频和多次谐波分量。
考虑到工程上的实用性,这里采用平方检波法简化而来的绝对值检波法。过程如图 2所示,先对输入信号进行带通滤波,再取绝对值后低通滤波,进行谱分析就可以获得调制谐波线谱序列。

图2 绝对值低通解调处理框图Fig.2 Sketch diagram of low pass demodulation of absolute value
2 调制线谱的自动提取
m(t)的功率谱中包含了若干线谱,线谱是以某种方式叠加在连续谱上的。连续谱变化比较平缓,谱的斜率通常较小。当然也存在连续谱部分谱曲线偶然发生局部较快地上升或下降的情况,但绝不会像线谱那样在较小的频率范围内突然上升后又发生很快的下降,因而连续谱是构不成“峰”的。连续谱中只可能有平缓而宽广的隆起,这种隆起的斜率比谱峰的斜率要小得多,而宽度则大得多[8]。
根据线谱与连续谱的区别,可归纳出以下提取线谱的方法。
1)第1步:找出拐点,即满足斜率要求的谱峰。
作为线谱的谱峰的左右边界分别要满足一定的条件,即左边界必须有超过斜率门限的正斜率;右边界必须有绝对值超过斜率门限的负斜率。另外,还必须满足为构成谱峰所必需的左右边界的搭配关系:右边界的左边必须是一左边界;左边界的右边必须有一右边界。
线谱频率一般选在峰尖位置,即谱峰范围内局部极大值的位置。
2)第2步:进行连续谱的平滑,设置峰高门限。
连续谱的平滑采用双通分离窗算法,这种算法因为其计算量小而被广泛应用。目标辐射噪声信号的线谱具有集中而稳定的能量,设定峰高门限(所谓峰高,应该是从当地连续谱的极限起算的相对峰高),将高于该门限的线谱挑出。
3)第3步:归并线谱:将相邻线谱间隔小于3 Hz的线谱归并为1根线谱。
在实际的线谱图上,由于谱线可能存在较高的旁瓣,1根谱线可能会被误判为2根谱线;其次,就是在相距很近的 2根谱线之间可能存在旁瓣叠加产生较高的点,也可能会被误判为线谱。因此,需要对上述可能造成误判的谱线进行剔除。
3 调制线谱序列的轴频估计
在提取DEMON谱线谱序列后,可采用最大公约数法估计其轴频,轴频对应螺旋桨转速。对于舰船辐射噪声,同样调制信号对不同频带噪声的信号调制度是不同的,有的频段调制强,有的频段调制弱,某频段对应的 DEMON谱可能只有某几根DEMON线谱,而另一频带对应另外不同频率的几根DEMON线谱。如何利用各频段的DEMON线谱信息得到目标轴频信息,这里给出2种方案:①综合利用所有频带的DEMON线谱,将提取出的疑似线谱综合,用来进行轴频的估计;②通过判定准则提取出调制最好的信号频段,其原则是同时考虑提取线谱个数最多和成倍频关系的线谱数大于3和线谱总数的一半的基准。
本文采用最大公约数算法[9]提取轴频,简述如下。
1)差频。设DEMON谱经过净化得到M根有序线谱fm,相互间分别求差频Fi,j:

差频取值范围即为轴频取值范围,这里设定轴频取值范围为 3~60 Hz,落在该范围外的差频舍去。将差频数组元素从小到大排列,得到差频数组{Fi,j}。
2)差频数组{Fi,j}中可能含有相等或近似相等的元素,统计在容限范围内相同差频的个数,定义为品质因数sn,并在新的差频数组中只保留1次该差频记为Fn。记新得到的差频数组为{Fn},设含有N个差频。
3)用每一根线谱fm去除以差频数组{Fn}中的每一个差频。定义品质因数qn,每一个差频Fn对应一品质因数qn。若:
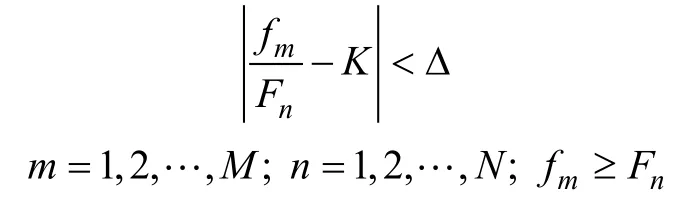
成立,则Fn所对应的品质因数qn加1(品质因数qn的初值均设为0)。式中:qn为含有M根线谱的序列{fm}中有qn根线谱是差频Fn的倍频;K为(fm/Fn)的四舍五入值,是正整数;Δ为误差控制量,其大小依据差频Fn的大小而定。
当Fn≤10Hz时,取Δ=1/Fn;当Fn>10Hz时,取Δ=2/Fn。此过程即为在差频数组{Fn}中提取线谱序列{fm}的最大公约数,品质因数qn最大值对应的Fn即为所求。
4)每一差频对应2种品质因数sn、qn,将它们相乘,定义第3种品质因数:mn=sn×qn。品质因数mn的最大值对应的差频即为轴频。
5)当不同差频所对应的品质因数mn相同时,取对应品质因数qn最大的;当品质因数qn也相等时,就要先分析这2个线谱频率是否成谐波倍数关系,满足则取小的那个频率,不满足则选取差频大的那个频率。
4 海试数据处理
对试验船数据进行了处理。首先按1/2倍频程把宽带信号划分为5个频带,分别通过绝对值检波求解调制谱。图 3(a)、3(b)、3(c)、3(d)、3(e)分别表示频带 I、II、III、IV、V这 5个频带的DEMON谱与线谱提取结果,其中背景线表示连续谱的平滑曲线,“o”表示提取出的线谱序列。从图中可以看出,频带IV与V的解调制效果比较好。对于其它试验船噪声样本,最佳调制频段会有变化。但一般来说,在高频段解调制效果比较好。

图3 各频带解调制谱Fig.3 DEMON spectrum of each frequency band
对图3中5个频带DEMON谱提取的线谱进行综合,得到图4所示的线谱序列。对线谱序列用最大公约数法提取轴频,轴频估计的处理过程中设置频率门限去除低频线谱的干扰,最后估计出的轴频为3.1 Hz。同时也提取了调制最好的信号频段,通过机器的自动判断,选取频带IV进行了轴频的估计,估计结果一致。

图4 各频带综合线谱提取结果图Fig.4 Synthesized line spectra of all frequency bands
5 结束语
本文对舰船辐射噪声进行了DEMON谱分析,并在 DEMON分析的基础上进行了机器自动化线谱提取和轴频的估计。海试数据的处理结果表明,在某些频段上调制强,某些频段上调制弱,为了充分利用调制信息,综合了各频带DEMON谱信息,采用最大公约数法进行轴频的估计。研究结果表明:采用机器自动化DEMON线谱自动识别与线谱提取是可行的。
