基于工作过程的工业机器人技术一体化教学模式探究
2022-01-17苏紫珍
苏紫珍
(福州第一技师学院,福建 福州 350108)
0 引言
工业机器人已成为制造业加速转型升级,生产力提升的代表。据统计,截至2020年12月中国工业机器人的数量从2015年的32996套增加到了237068套,达到7倍多的增长量,2021年,我国各领域将使用超过100万台的工业机器人,与此同时工业机器人行业高素质技术技能人才的供需矛盾也随之突显。据相关数据表明,机器人应用人才需求量将超过20万,并且每年以超过20%的速度增长[1]。技工院校作为高素质技术技能人才培养基地的重要组成部分,应加快人才培养模式改革,创新教学模式,努力提高培养质量,为工业机器人产业提供人才保障。
1 工业机器人专业教学现状
1.1 实习实训基地的建设较为缓慢
工业机器人专业的教学实训基地建设基本处于起步阶段,又由于生产型的工业机器人系统设备价格较高,且占地面积较大,教学实训场所无法同时容纳太多台设备,学校只能购置少量的实体工业机器人以供学生实操练习。因此,实训场地和设备无法满足实训教学活动,专业建设中还需加快设备的添置进度。
1.2 专业教师的教学能力比较弱
主要师资是原先机电专业教师转型为工业机器人专业教师,或是毕业之后进入技工院校从事专业课程教学。部分教师由于欠缺系统的教学理论学习和专业技能实践,在进行教学设计时,不能把握教学重难点,教学方法运用不当,教学评价手段不科学等问题较为突出。因此,专业教师在专业技能和教学能力水平方面都亟待提升。
1.3 理实一体化的课程体系不够完善
工业机器人专业课程体系中的专业知识较多,具体包括计算机控制、电子技术、机械学、工程力学等学科的内容,知识覆盖面广且理论知识复杂抽象,对技工院校的教学提出了挑战。目前,多数学校采用常规的理论加实训的方式开展教学,理论知识部分,由于内容涉及三维空间位置的计算和想象,对技工院校学生来说学习难度还是比较大,学生经常无法深入思考学习。实训部分,由于设备工位不足,实训内容与工作岗位契合度不高等原因,实训课无法有效开展。因此,便造成了学生的理论知识不扎实、实训操作技能水平不高,无法达到企业对工业机器人专业人才的需求。
2 工业机器人技术教学改革基础
技工院校理实一体化教学模式能够有效地将理论和实践有机融合,对于技能人才的培养有着重大意义[2]。笔者所在院校目前已建立工业机器人实训基地,配备了以ABB IRB120工业机器人为核心的多功能实训平台及与该工作站相似匹配的虚拟仿真平台,致力于推动“教,学,做一体化”教学改革。本文以工业机器人码垛任务的项目教学为例,探索基于工作过程的工业机器人技术一体化教学实践。
3 基于工作过程的一体化教学实践
工业机器人码垛项目任务采用在线示教的方式编写码垛的作业程序并验证任务程序的有效性。机器人码垛的动作主要分为抓取工件、判断放置位置、放置工件等一系列子任务,最终码垛结果为圆柱块码两层。学生前续课程已学习机器人基本操作的示教编程。
3.1 设计思路
基于工作过程的一体化教学以学生为中心,通过项目任务的引导,学生主动完成学习任务。课堂以视频展示工作情景导入工作任务,以此调动学生学习专业知识的主动性,通过营造实际工作情景氛围来激发学生的兴趣,形成自主学习和团队合作的意识,学生在完成工作任务中体验成功,产生动力,养成自主学习积累的习惯,进而发展自主学习的能力[3]。
3.1.1 教学目标
知识与能力目标:了解工业机器人的码垛结构的特点、分类及机械部件,掌握码垛单元的控制流程。能够运用模拟仿真软件对项目任务进行模拟仿真,完成立体码垛单元控制程序简单设计与调试;情感与素养目标:形成敏、严、专、精的精神,形成团队意识和创新意识,养成爱岗敬业的职业素养。
3.1.2 教学方法
讲授法。通过现场演示教学,让学生加深对机器人码垛工作站的直观认识,切入点是教学内容的项目任务。在教师的引导下,观察码垛机器人的运动,分析其运动轨迹及控制流程;任务驱动法。引导学生根据码垛任务的工作流程,确定工件的码垛方法及控制流程方案,进行模拟仿真,确定任务分配及实施。
3.2 教学过程
教学过程根据课堂实施流程、教师和学生的活动角度以及各环节的意义目的进行,具体如表1所示。
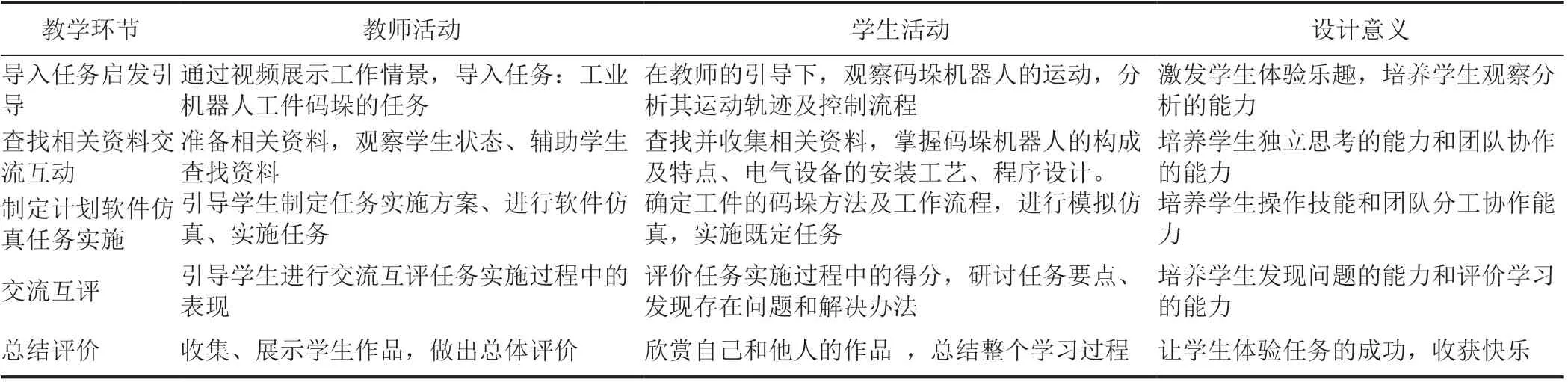
表1 课堂设计表
3.3 教学评价
通过将工业机器人技术专业的人才培养目标、技工院校学生学习特点以及一体化教学目标三者有机结合,构建以任务过程评价为主,任务结果评价为辅的教学评价模式。任务过程评价主要包含职业素养评价(占比20%)和任务中各关键节点的成绩(占比40%),任务结果评价主要是理论知识成绩(占比10%)和专业技能水平评价(占比30%)。评价方式有教师评价和学生互评,两项评价权重各占50%。其中,职业素养和专业技能水平评价通过教师评价的方式进行,具体包含学习态度、操作规范、团队协作能力和职业核心能力;任务节点成绩和理论知识成绩由学生互评的方式产生。
3.4 教学反思
(1)教材的选择存在局限性。目前,教学中多以实训设备配套的工业机器人操作编程教材为主,内容还是以工业机器人的理论基础知识和工业机器人常规操作及编程方法为主,具有普遍适用性,但是基于项目任务式一体化教学活动的开展,需要教材以项目任务为单元进行设计,应包含一体化课程任务描述、学生学情分析、知识技能、教学活动策划、任务实施和评价考核等,同时应具有很强的引导性和知识应用性,大部分教材仍无法满足相关要求。(2)数字化教学资源比较缺乏。教学资源分为硬件资源和软件资源,目前大部分院校还处于建设实训基地增加硬件设备阶段,仍然需要投入大量经费,而教学资源库建设需要既懂工业机器人专业课程又精通课件制作技术,更是处于探索期,缺乏高质量的教学资源,连带教学的硬件资源利用不够充分[4]。
4 提高教学质量的策略
加强实训条件建设。基于工作过程的一体化教学需要配套一定的教学环境,例如分组围桌教学的桌椅、加装虚拟仿真教学系统的多媒体教室等。也可通过校企合作等方式共建共享实训基地,努力做到教学环境与企业工作环境相吻合,教学过程与工作过程相一致。
创新教学方法手段。一是教学设计的创新,包括详细的教学计划、教学实施过程和教学评价方案等,教学设计中要强调学生的技能学习和工匠精神,形成团队意识和创新意识,养成爱岗敬业的职业素养。二是教学内容的创新,专业课程紧密对接工作岗位,在教学项目中结合技能竞赛和职业技能等级证书,探索岗课赛证融通。三是在教学评价的创新,进一步探索基于工作过程的考核,通过任务计划和实施过程情况评价学生学习成果。
组建模块化教学团队。2019年8月,教育部等四部门关于《深化新时代职业教育“双师型”教师队伍建设改革实施方案》中提出:“建设高素质“双师型”教师教学创新团队,实施团队合作的教学组织新方式、行动导向的模块化教学新模式”[5]。加强专业教师队伍建设,尤其是“双师型”队伍的建设是推进一体化教学模式改革和提高课堂教学质量的关键所在,因此需要鼓励专业教师进入技术性岗位实践锻炼,坚持不懈地推动教师专业发展。
5 结论
基于工作过程的工业机器人技术专业一体化教学是对接企业实际生产过程的教学模式,实践表明,在教学过程中学生先通过虚拟仿真平台的模拟,然后在设备上进行实操验证,同时以任务过程评价为主的教学评价模式,不仅能有效激发学生的兴趣,还能客观反映学生对技能掌握的情况。
