基于机器人视觉的银行预警安防智能机器人设计
2022-01-16任雁,刘佳
任 雁,刘 佳
(河南林业职业学院,河南 洛阳 471000)
在机器人视觉的自动报警机器人中,最重要的工作就是实现机器人对运动目标的跟踪[1],对目标特征的提取和对目标进行图像分割是这项技术的基础和关键。其中目标动作特征作为最主要的识别分割。目前许多监控设置只能够录制案发视频,却不能在案发时迅速发出警报,导致许多案件不能被及时发现,给破案造成了难度。
1 总体设计
银行预警安防智能机器人基于机械视觉通过感知模块来实时监测当前区域人们的运动状态[2],对于银行预警安防机器人,能够准确检测出当前人们的运动状态,而后通过主控模块控制机器人的警报发送;通过定位模块定位机器人所处位置,并可以通过手势识别来判断银行的情形。
利用宽动态摄像头等组成的感知模块,能够实时、准确地检测人们的动作。然而,由于环境本身的固有特性,随着色彩、光照的外界变化,会产生不同程度的偏差,必须通过一些补光方法,对色彩采集数据进行融合,使拍摄的图像与真实现场相吻合,其设计流程图如图1所示。

图1 设计流程图
2 特征检测
2.1 特征提取
机器人基于机械视觉,通过特征提取能够侦测到目标在监控区域内的动作,通过特征提取模块,进行模块对比来判断目标动作异常。
特征提取模块可以分为两项,分别是特征提取、手势识别。其中图像处理的初级运算是特征提取,其通过分析检查所有单个的像素,从而确定这个像素是否代表了某个特征。
单目视觉的静态手势作为一种极为简单的识别技术,是手势识别目前能够运行的基础。手势识别这种模板匹配技术可以匹配待识别的手势特征和提前储存的模板参数特征,进而测量它们之间的相似度并完成任务。手势识别会自动选取最小距离对应的模板手势作为它的识别结果。
2.2 动态侦测
本机器人使用图像差分运算和图像的小波变化来完成对目标的动态侦测,见图2。

图2 动态侦测直方图
3 特征处理
3.1 小波压缩
小波压缩[3]能够有效地将资料压缩至最小,能够使信息被迅速处理,便于数据的传输压缩方法来确保本机器人对目标监控的实时性和准确性。
图3 是二维离散小波转换的算法流程图,输入讯号x[m,n],由图3 中顺序可以得到,沿n 方向做离散小波转换做完一阶二维的离散小波变换。可以看出高频部分,左下角位水平方向的边缘,右上方为垂直方向的边缘,右下方为图像的角落。而左上角为低频,可继续做小波转换,分出更粗略、接近原影像的缩图,来达到压缩效果。

图3 算法流程图
3.2 高斯去噪
高斯噪声可以被高斯滤波去除,高斯滤波属于一种平滑的线性滤波,广泛地应用于图像处理过程中减少高斯噪声的工作[4],高斯滤波的实质是加权平均在处理整幅图像的应用,它的目的是得到每个单个像素点的加权平均值,对图像上每一个像素点本身和其相邻区域的像素进行加权平均。
每一个在图像中的像素都能使用模板扫描得到,在确定了每一个像素的值后,该模板中心点像素的值就会被先前由模板扫描确定的像素的加权平均后的灰度值代替。
高斯噪声会任选一组瞬时值中的n 个,它的值服从正态分布,即按n 个变数的高斯概率定律来分布,属于随机噪声,以下是它的概率密度函数表示:

高斯函数的密度函数曲线如图4 所示。

图4 高斯函数密度曲线图
3.3 手势识别
手势识别是在现有手势识别基础上通过解决手心追踪定位问题来实现手势的识别和实施性的高效性[5]。
一个特定图像中的所有颜色和具有与其相似的颜色的像素点均可被手势识别中的自适应阈值经过操作得到,自适应阈值能够识别被二值化处理的图像中莫表区域的特征,获取目标手势区域需要对二值化处理的图像进行腐蚀,图像平滑处理和膨胀处理,以便自适应阈值读取其中的手势信息,确定当前的手势,进行图像目标区域特征的识别[6],见图5。
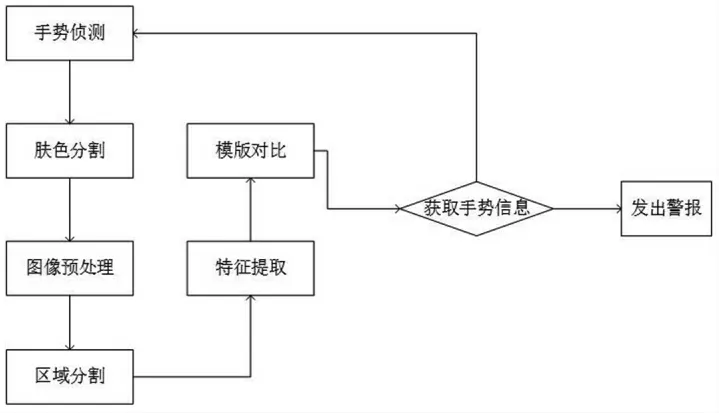
图5 手势识别流程图
手势识别算法在机器人中完成目标手势的确定和判断[7],见图6。

图6 手掌的二值化图像
(1)确定肢体最长和最边缘的位置,手掌最先被确定,第一次扫描手覆盖的区域,将该区域中最大的一列确定为MN,再记录最长的像素为DMax和它包含的列数k,接着进行下一次扫描,确定并标记手的各个边缘,如左边缘AE,右边缘BF。以上的具体操作法方法为:当手的最边缘第一次出现列数满足小于或等于k 且图形像素点的颜色连续三次相同时,将之一列像素记为PQ,这一列的编号记为kPQ。
手的上边缘:如果扫描的图像区域中有格式大于DMax的像素点,并且其列数满足小于或等于kPQ,该像素区域的像素变化幅度最明显,则将其记为MK,编号为LMK。
经测试,一个正常人的五根手指张开时最左边缘和最右边缘的最长部位之间的比值很接近0.50 或0.66 等数值。
(2)中点圆弧曲线确定。确定AB、CD、EF 后,分别取起点,记为M、K、N,其坐标依次为M(XM,YM)、K(XK,YK)、N(XN,YN)。位于一段圆弧中心的极半径经过三个确定的点,可用三角函数求出该极半径。进而求得直线MK、NK的中垂线的方程L1、L2 随后求的L1 与L2 的交点O,此交点即为由M、K、N 三点确定的唯一圆O(X0,Y0)的圆心,其圆心坐标及半径R。
(3)确定最大内接圆和其备选点后,在圆弧MN 上均等取出一定个数的点作为手掌的备选点,文章以选取五个作为演示,例如其中一个备选点为P,我们记该点到手心的每一个边缘的直线距离为D1、D2、D3、D4、D5,被选取的点在扫描过的区域内外接圆半径的最大值将由以上数据中的最小值代替。
分别计算被选取的五个备选点最大外接圆半径,确定其圆心为P,并将其最大直径记为DMax,由此得到手指到手心最大内切圆的半径,手心的近似位置即为点P 所在位置。
(4)手指交割圆的确定[8]。将以上过程确定的手心近似位置点P 作为圆心,并以DMax的1/2 为半径画圆,然后逐个检查该圆上每个像素点突变程度,从而判定手掌的具体位置以及手指和所画的圆相交的情况,理解这个手势具体的含义。
4 实验结果
图7、图8 为不同光照条件下原始图像对目标进行特征提取并进行二值化的结果,从中可以看出系统在不同环境下有着很好的适应度。

图7 光照强时
在图7 情况下机器人能准确地提取出目标的二值化图像,对比模板后不会进行报警;图8 情况下,机器人根据目标的手势动作,对比模版后已经显示报警。其中图7为目标无动作异常时,图8 是目标使用手势提取功能。

图8 光照弱时
基于机械视觉的银行预警安防智能机器人的手势识别的实验结果如图9 所示。

图9 实验结果图
5 结论
在本文中,作者提出了一种新的方法,它不仅能够检测目标的动作特征还能检测手势,主要过程是:
(1)提取RGB 图像中的肤色物体,通过选择最近位置来确定目标的位置。
(2)从深度图像中分割目标更精确的形状,根据RGB 图像中检测到的近似的位置,然后得到手的二进制图像,如果两个目标同时被检测,可以使用二均值聚类成功将其分开。
(3)通过计算每个手连接区域的最大内切圆的中心来确定手掌上中心,通过Graham 扫描算法找到每只手的凸包,通过组成等腰三角形和为等腰定点设置最小阈值,从凸包定点中选择点来组成指尖。
(4)通过与数据库中的手势进行对比,发现一致时报警。
