水下攻防武器能源动力技术发展现状及趋势
2022-01-15史小锋党建军胡利民
史小锋, 党建军, 梁 跃, 胡利民, 路 骏, 乔 宏
水下攻防武器能源动力技术发展现状及趋势
史小锋1, 党建军2, 梁 跃1, 胡利民1, 路 骏1, 乔 宏1
(1. 中国船舶集团有限公司 第705研究所, 陕西西安, 710077; 2. 西北工业大学 航海学院, 陕西西安, 710072)
能源动力系统是水下攻防武器的心脏, 其性能很大程度上影响了水下攻防武器的任务范围和作战效能。文中从分析水下攻防武器对能源动力技术的需求出发, 以鱼雷和无人水下航行器为重点, 梳理了水下攻防武器能源动力技术的发展现状, 介绍了美国、俄罗斯、日本以及欧洲各国在能源动力技术方面的特点, 从热动力能源、电动力能源、热机和电机4个方面探讨了水下攻防武器能源动力技术的发展趋势。总结得出, 水下攻防作战逐渐显示出无人化和体系化的特点, 要求水下攻防武器具备远航程、宽速域、大深度的能力, 而能源动力技术则相应地围绕高能量密度能源、高功率密度动力2个主题持续发展。
水下攻防武器; 能源动力系统; 鱼雷; 无人水下航行器
0 引言
水下攻防武器主要是指鱼雷、反鱼雷鱼雷、无人水下航行器(unmanned undersea vehicle, UUV)、反UUV武器等用于水下攻防作战的各类武器, 主要承担反潜、反舰、鱼雷防御、UUV反制等任务, 是执行水下攻防作战的必要装备, 也是海军水下攻防装备体系中的重要组成部分。
根据未来水下攻防作战任务需求, 水下攻防武器的典型作战模式包括远程快速精确打击、超远程巡航隐蔽攻击、大深度反潜等, 要求水下攻防武器具备远航程、宽速域、大深度的能力。
重型鱼雷作战一般分为中低速线导隐蔽接敌段和末端高速攻击段, 为保证快速接敌和对敌目标的有效打击, 导引接敌段速度一般不小于25 kn, 末端高速攻击段不小于50 kn, 且要求鱼雷的最大航速为目标航速的1.5倍以上。随着现代大型舰艇编队对潜探测距离的进一步扩大, 重型鱼雷要进一步提高打击半径, 满足反潜防区外精确打击要求, 需要鱼雷航程由目前的50 km提高到80~100 km; 随着现代大型舰艇的航速不断提升, 如美国濒海战斗舰的最高航速可达45 kn, 需要鱼雷最大航速由目前的50 kn提高到70 kn。
超远程巡航打击是一种非接触自主作战形式, 以海区控制、水下定点打击为目的, 对航母编队、海上兵力集团以及运输船队等实施打击的新型水下作战方式。以兵器深入替代兵力深入, 实现对航母编队的威慑和打击, 也可在有限时间内封锁港口和航道。攻击型UUV从敌防区外释放, 以中低速(4~12 kn)航渡上千公里至预定的控制或封锁海域; 到达就位点后, 以低速(4 kn左右)巡航模式搜索目标; 发现目标后解算目标运动要素并占领攻击阵位, 变高速(35 kn以上)攻击模式直接对目标实施打击。
为满足大深度反潜作战需求, 鱼雷最大作战深度应覆盖目标潜艇最大下潜深度。例如, 美国“海狼”级核潜艇航深达到610 m, 前苏联“阿尔法”级核潜艇航深达到900 m[1]。
能源动力系统作为水下攻防武器的心脏, 是将水下攻防武器自身携带能源的化学能或电能转换为推进其航行的机械功, 其性能和特点不仅决定了鱼雷武器主要战技指标(航程、航速及航深), 同时也决定了其隐蔽性、维修性和安全性等方面的性能。为满足上述作战任务需求, 并适应于水下特殊环境(海水阻力和压力等), 对水下攻防武器的能源动力系统提出了以下独特要求:
1) 在有限的体积和质量约束下, 所用的能源形式具有高能量密度的特点, 所用的动力形式具有高比功率和高效率的特点, 以满足水下攻防武器的航速和航程需求;
2) 能够不依赖大气中的氧气独立工作, 克服航行深度变化带来的海水背压影响, 保证推进功率基本稳定;
3) 具备多速制工作能力, 以增大航程, 提高隐蔽性等, 满足多任务功能需求;
4) 具有尽可能低的振动能级与辐射噪声, 具有宽频域的声隐身性能, 既不影响自导系统工作, 又避免被敌方探测, 如有废工质排出, 应尽可能溶解于海水, 降低航迹影响;
5) 可多次重复使用;
6) 存储周期长, 储存后能快速可靠启动工作;
7) 具有高安全性, 携带无腐蚀和无毒(或低毒)能源;
8) 工作可靠, 便于维护操作和使用。
上述特殊要求使得水下攻防武器的能源动力技术独具特色、自成体系, 其他行业成熟的能源动力形式难以采用, 因此一直是困扰水下攻防武器性能大幅提升的重大技术瓶颈。
文中以鱼雷和UUV为重点, 分析了水下攻防武器能源动力系统的特点, 介绍了国外在水下攻防武器能源动力领域的研究历程和最新进展, 结合水下攻防作战需求, 探讨了水下攻防武器能源动力技术的发展趋势, 并对我国水下攻防武器能源动力技术未来发展的重点方向提出建议。
1 水下攻防武器能源动力技术发展现状
1.1 鱼雷能源动力技术
1.1.1 美国
美国拥有雄厚的经济实力、工业生产能力以及科技后盾, 是鱼雷能源动力领域的头号强国。20世纪50年代之前, 美国鱼雷以电动力为主。具体来说, 除MK16和MK17鱼雷使用烃燃料+H2O2为能源、涡轮机为动力, MK40鱼雷使用固体火箭发动机推进外, 其余如MK27~MK45、MK47等十多个型号均为电动力。20世纪50年代以后, 美国鱼雷逐渐转为以热动力为主。图1归纳了美国鱼雷装备及其能源动力技术的发展历程。
在轻型鱼雷方面, 采用OTTO-II单组元燃料、凸轮活塞式发动机研制了63 kW功率的热动力系统, 用于MK46 Mod1~Mod7和MK54高性能轻型反潜鱼雷, 构建了美国半个多世纪的轻型反潜鱼雷发展基础。20世纪70年代后, 为对抗前苏联1000 m大深度双层核动力潜艇, 历经20多年发展了以Li/SF6金属能源、高速蒸汽涡轮机为标志的闭式循环热动力系统, 使轻型鱼雷航速达到50 kn, 航深达到1100m, 该热动力系统应用于MK50鱼雷。
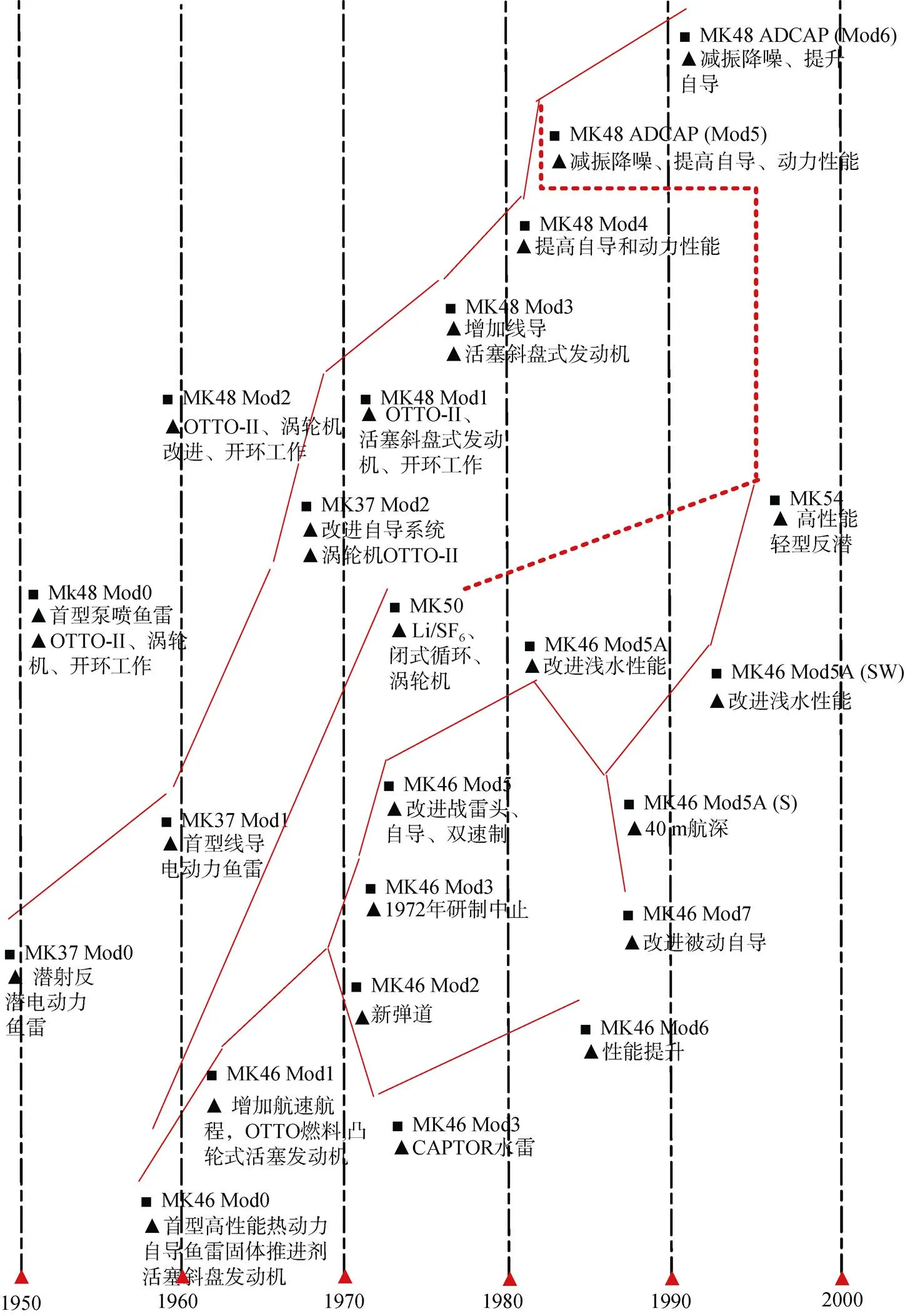
图1 美国鱼雷装备及其能源动力技术发展历程
在重型鱼雷方面, 自20世纪60年代中期提出发展OTTO-II燃料的MK48热动力通用重型鱼雷, 奠定了活塞发动机动力系统在MK48系列鱼雷上的应用基础, 之后在减振降噪、增加速制、降低低速下限和提升高速上限等方面不断改进, 形成Mod3、Mod4、Mod4M、Mod5(ADCAP)、Mod6AT和Mod7等系列产品[2]。
1) OTTO-II单组元燃料活塞机动力系统
为满足324 mm直径轻型反潜鱼雷需求, 美国研发了采用OTTO-II单组元燃料, 功率为63~ 120 kW的一系列对转输出的筒型轴向活塞发动机, 其动力转换机构分为双向凸轮和周转斜盘式两类。功率63 kW的动力装置采用单速制和双速制工作模式, 使用5缸对转轴向活塞发动机, 双向正弦凸轮式动力转换机构以及固定燃烧室, 应用于MK46和MK54鱼雷。
为满足533 mm直径重型鱼雷需求, 美国研发了采用OTTO-II单组元燃料、功率150~400 kW的一系列单轴输出的斜盘活塞发动机。动力系统为双速制或三速制, 旋转燃烧室最大工作压力为35 MPa, 大功率发动机采用单转输出, 低功率发动机采用单转或对转输出, 应用于MK48鱼雷。MK48鱼雷能源动力系统在其后续改进的重点是满足55 kn高速制和28 kn低速制的三速制工作和减振降噪改进, 其改进过程及要点见图2。
2) OTTO-II单组元燃料涡轮机动力系统
美国重型鱼雷用燃气涡轮机动力系统1962年开始立项, 并由美国西屋电气公司研制, 使用OTTO-II单组元燃料, 开式循环工作, 单轴输出功率260 kW。在与活塞发动机动力竞标失败后, 西屋电气公司提出了具有噪声小、功率大特点的涡轮机动力改进方案, 最终应用于英国“旗鱼”鱼雷。
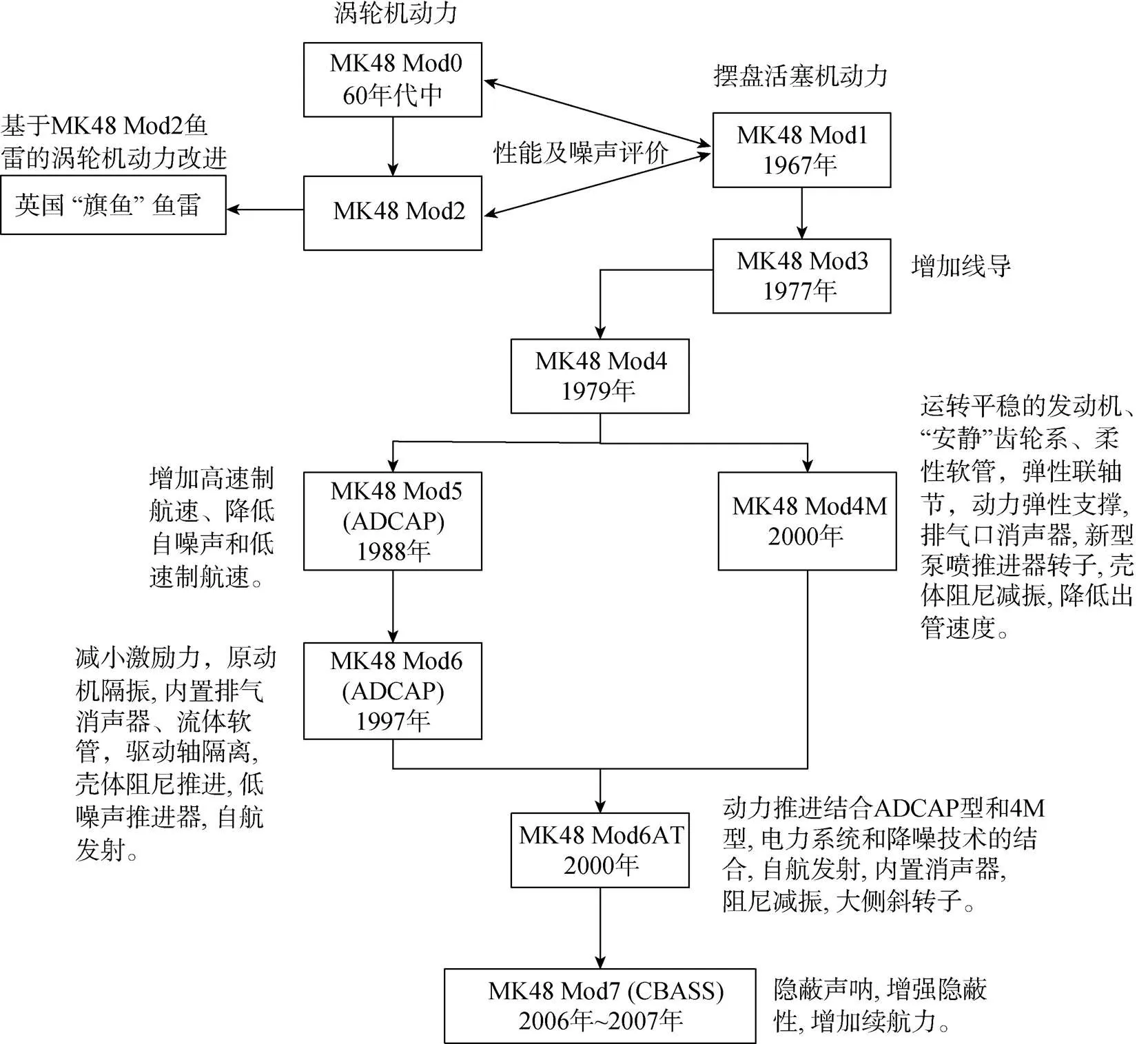
图2 MK48鱼雷能源动力系统研制及改进历程
3) Li/SF6能源闭式循环动力系统
贮存化学能推进系统(stored chemical energy propulsion system, SCEPS)是一种基于Li/SF6能源的闭式循环汽轮机动力系统, 具有无乏工质航迹、工作效率与深度无关、运转平稳、能量密度和功率密度高等优点, 其采用的闭式兰金循环的理想转换效率为33%, 实际转换效率为21%。该系统首先由美国TRW公司提出并研制, 之后由宾夕法尼亚州立大学接管继续研究, 可称之为鱼雷能源动力领域的划时代发明。在此基础上, 美国进一步开发了更先进的ADSCEPS(advanced SCEPS)系统, 大幅提高了兰金循环效率, 并应用于MK50轻型反潜鱼雷。但是, 该系统比MK46鱼雷能源动力系统结构复杂, 制造和使用成本相对较高, 加之国际形势发生变化, 因而未大批量装备部队。
近年来, 以“紧凑型快速攻击武器”计划为背景, 美国重拾Li/SF6能源闭式循环汽轮机动力系统的研发, 以替代高成本零部件, 并提高系统可靠性。2020年, 美国诺斯罗普·格鲁曼公司将该技术应用于171 mm口径超轻型鱼雷原型样机并测试成功。目前, 该超轻型鱼雷项目已列入美海军研制计划, 装备“弗吉尼亚”级攻击核潜艇。
1.1.2 俄罗斯
俄罗斯继承了前苏联的雄厚基础, 紧跟世界技术发展潮流, 形成独有的技术发展道路。20世纪30~40年代, 前苏联以重型反舰鱼雷为目标, 自主研发煤油+空气(氧气)为能源的活塞发动机动力系统, 同时引进德国技术和人才发展煤油+ H2O2为能源的涡轮发动机动力系统。50~60年代, 在将上述技术形成多型鱼雷装备的同时, 开始反潜/反舰通用鱼雷能源及动力技术的探索。70~80年代, 发展了单组元燃料斜盘活塞发动机和金属水反应燃料闭式循环动力技术, 并系统开展了鱼雷振动噪声特性及控制措施的研究。进入90年代, 由于国家局势动荡, 其鱼雷能源动力技术发展速度放缓, 但也减少了海军不切实际需求的干扰, 凭借雄厚的技术基础在斜盘活塞发动机、HAP三组元涡轮机技术研究和相应鱼雷装备研制中取得了突破, 在满足俄罗斯海军需求的同时进入国际市场。图3归纳了俄罗斯鱼雷装备及其能源动力技术的发展历程。
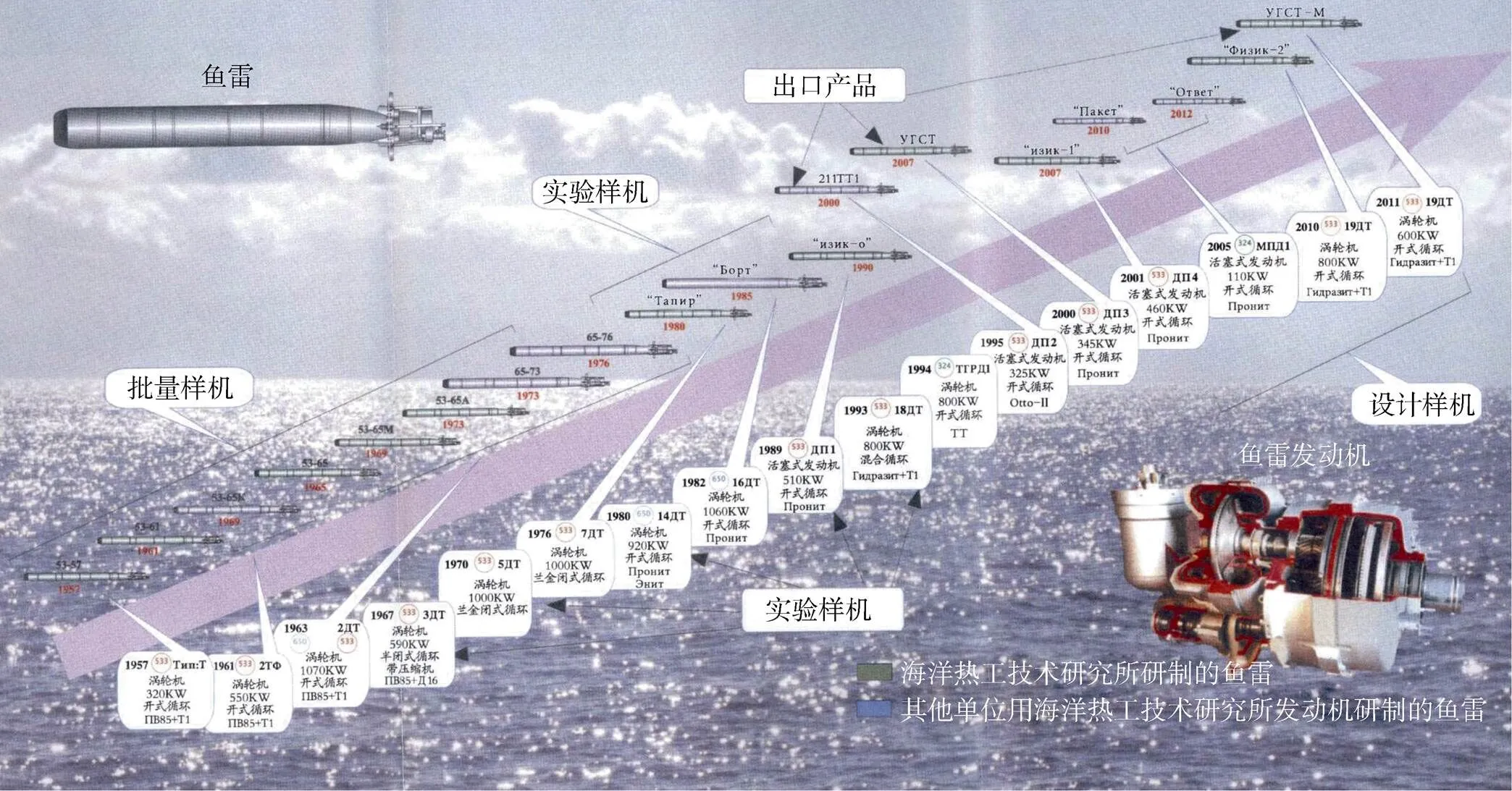
图3 俄罗斯鱼雷装备及其能源动力技术发展历程
1) H2O2+煤油+海水三组元燃料涡轮机动力系统
以H2O2+煤油+海水为能源的燃气涡轮机动力系统是前苏联在20世纪40~70年代重点研究的鱼雷能源动力技术, 研制了3型反舰鱼雷用涡轮机动力系统, 其输出功率由320 kW增加到1070 kW, 支撑了8型鱼雷型号, 使得鱼雷最高航速达到70 kn, 最大航程达到50 km。解决的重大技术问题和取得的标志性成果有:
a. 掌握了使用固体催化剂分解H2O2, 使用分解产物点燃碳氢化合物燃料;
b. 使用海水作为涡轮发动机工质成分, 在宽温度范围确保海水喷入条件下H2O2与煤油的有效燃烧;
c. 可变传动比减速器的鱼雷涡轮发动机;
d. 含2个燃烧室和喷嘴的涡轮机调控系统, 保证任何深度下双速制恒定功率输出;
e. H2O2的长期贮存和远程监控系统;
f. 通过采取减震降噪措施, 涡轮机动力的振动能级比活塞机动力低20~30 dB。
2) OTTO-II单组元燃料活塞机动力系统
20世纪60年代末~80年代, 为了发展大深度通用型鱼雷, 在深入了解和掌握美英等国鱼雷动力技术的基础上, 前苏联研究了OTTO-II单组元燃料和高比功率活塞发动机等技术, 研制出仿美国MK46鱼雷的ДП-294凸轮活塞发动机、200 kW的ДПО-14对置式凸轮活塞发动机、510 kW斜盘活塞发动机。上述研究成果虽然大部分未形成装备, 但为后续通用型鱼雷发展奠定了坚实基础。
进入90年代国家动荡的艰难时期, 俄罗斯研发了345 kW和460 kW斜盘活塞发动机, 形成了50 kn和55 kn通用重型鱼雷装备, 其最大航深达到500 m, 满足40~50 km的作战航程需求。在轻型反潜鱼雷方面, 研发了110 kW的斜盘活塞发动机, 装备于30~50 kn双速制轻型反潜鱼雷, 最大航程达到20 km, 最大航深达到600 m。
3) OTTO-II+HAP+海水三组元燃料涡轮机动力系统
20世纪60年代末~80年代, 前苏联研制了直径650 mm反舰鱼雷用920 kW和1 060 kW两型大功率双速制涡轮机动力系统, 采用OTTO-II单组元燃料, 完成了陆上台架和实航验证, 最大航速时航行深度600 m, 降速后最大航行深度可达800 m。虽然直径650 mm鱼雷最终选择了H2O2+煤油+海水三组元燃料涡轮机动力系统方案, 但上述研究工作为涡轮机动力系统的后续发展奠定了坚实的基础。
进入90年代国家动荡的艰难时期, 为弥补经费的不足, 俄罗斯研制了面向国际市场的线导通用重型鱼雷UGST, 其采用OTTO-II单组元燃料和斜盘活塞发动机[3]。为提升UGST鱼雷性能以获得更多国际订单, 随后将其动力系统升级为HAP+OTTO-II+海水三组元燃料的涡轮机动力系统, 可实现最高航速65 kn, 最大航深400 m, 混合航程60 km。
4) 半闭式与闭式循环动力系统
在1966~1968年期间, 前苏联开发了异丙基碳硼烷+92%~95% H2O2能源的大深度、大功率半闭式循环涡轮机动力系统, 其能量密度比煤油+ H2O2高30%, 燃烧产物中不可凝气体减小3/5。该型动力系统仅完成部分参数的功率试验, 可满足500~600 m最大航深范围内55 kn的鱼雷航速需求, 但未达到800 kW的预定功率指标。1969~ 1985年, 前苏联开发了金属水反应能源的多速制、1 000 kW闭式循环涡轮机动力系统。其显著特点是采用已在超空泡鱼雷验证、30~40 mm/s燃烧速度的镁金属药柱, 实现了动力系统的闭式循环工作, 不受海水背压影响; 采用了鱼雷头部排出燃烧产物的排气方式, 实现了辐射噪声的屏蔽, 没有明显的航迹。在研制过程中共完成近900次的陆上台架和实航试验, 仅燃料燃烧系统试验就进行了110次, 形成了几十项技术发明。但是由于研制周期过长、国家财政经济困难等因素影响, 特别是受OTTO-II单组元燃料活塞发动机动力系统研制进展顺利的影响, 上述项目在进入国家发展计划前被取消。
5) 金属燃料水反应发动机动力系统
金属水反应冲压发动机是俄罗斯独具创新的鱼雷能源动力技术, 应用于世界首创的超空泡反舰鱼雷“暴风雪”[3]。该发动机是以Mg基金属燃料与海水反应生成工质, 以推动鱼雷在水下空泡流场中以200 kn以上航速高速航行, 其航程可达10 000 m。
6) 涡轮喷水发动机动力系统
涡轮喷水发动机也是俄罗斯独具创新的鱼雷能源动力技术, 应用于直径400 mm轻型反潜鱼雷A3。该发动机在水下点燃固体药柱产生燃气, 燃气带动涡轮旋转驱动泵喷推进器, 可使A3鱼雷实现60 kn的航速, 最大深度为400~800 m, 最大航程为900~3400 m。
7) 核动力系统
2018年, 俄罗斯总统普京在国情咨文中公开了“波塞冬”核动力鱼雷。同年, 俄罗斯国防部首次公开了“波塞冬”核动力鱼雷的测试画面。据称该雷直径为1.5 m, 长24 m, 采用核动力推进, 携带核战斗部, 具备跨洲际打击敌方沿岸目标和航母编队的能力。分析公开资料可知, “波塞冬”核动力鱼雷采用了尺寸小、启动快、功率密度高的核反应堆, 其中液态金属冷却核反应堆可能性较大, 且与亚历山德罗研究所研制的AMB-8型核反应堆密切相关。
1.1.3 欧洲
20世纪50年代, 由于核动力潜艇的发展, 潜艇航行深度大大增加, 不受背压影响的电动力鱼雷成为反潜的主要武器, 法、德、意等欧洲海军强国开始大力发展鱼雷电动力技术, 重点解决高能量密度和使用安全的鱼雷动力电池。20世纪50年代以前, 电动力鱼雷均采用传统的铅酸蓄电池。60年代前后, 重型鱼雷先后采用Ag-Zn二次电池和一次电池, 轻型鱼雷则采用Mg/AgCl海水电池。80年代末又成功研制轻型和重型鱼雷用的Al/AgO电池。另一方面, 英国和瑞典对热动力技术有较强的自主研发能力, 逆势研制了OTTO- II+HAP+海水三组元燃料涡轮机动力系统和煤油+ H2O2双组元燃料凸轮活塞发动机动力系统, 走出了具有自己特色的独立发展道路。
1) Al/AgO电池+无刷直流电机动力系统
Al/AgO电池是战雷用一次电池, 以铝合金为负极, AgO为正极, 电解液以固态储存的NaOH为溶质, 以海水为溶剂, 采用双极性堆式结构。Al/AgO电池最初由美国海军水下战中心于20世纪70年代按相关专利开展应用研究, 原拟作为先进轻型鱼雷(advanced lightweight torpedo, ALWT)的备选方案, 后由于选用SCEPS而中断了发展。法国海军装备技术局于1977年委托SAFT公司继续开展相关技术研究, 1980年正式按新一代轻型鱼雷的要求进行研制, 并于1986年首次进行海上实航试验, 为1990年服役的法国“海蟮”轻型反潜鱼雷和1999年服役的法国、意大利两国共同研制的MU90轻型反潜鱼雷所采用[4]。在重型鱼雷方面, 意大利的“黑鲨”鱼雷[5]、法国的F21鱼雷以及德国的DM2A4鱼雷[6]均采用了Al/AgO电池。
2) OTTO-II+HAP+海水三组元燃料涡轮机动力系统
20世纪70年代末, 马可尼公司按英国海军参谋部第7525项要求决定研制一种可与美国MK48 ADCAP型鱼雷竞争的新型自导热动力重型鱼雷——“旗鱼”鱼雷。该鱼雷以OTTO-II+ HAP+海水三组元燃料为能源, 采用从美国购买的MK48 Mod2型鱼雷的涡轮机技术, 研发了可变速的21TP01涡轮机, 采用转速闭环控制, 通过改变变量泵斜盘角的方法调节燃料供应, 实现动力系统的速制转换以及变条件下的恒功率输出。通过使用HAP氧化剂极大地提高了鱼雷的航速, 其最大航速达到70 kn, 航程40~54 km, 最大作战深度约900 m。
3) H2O2+煤油双组元燃料活塞机动力系统
瑞典一直以H2O2为氧化剂发展能源动力技术, 在研究多种燃料的基础上, 选择了85% H2O2和15%煤油配比的双组元燃料, 研制了七缸轴向凸轮活塞发动机, 并应用于TP62和TP2000重型鱼雷。为减小发动机的振动传递, 整个发动机安装在鱼雷壳体内的隔振元件上, 并选择较低的工作转速, 使得与活塞相连的滚子与凸轮在运动过程始终接触。排出的废气经包围在发动机外围的冷凝器凝结成液态水和气, 冷却水被回收利用, 剩余的CO2经两级压缩排除雷外。由于CO2溶于海水, 因而鱼雷航迹不明显, 有利于隐身。
1.1.4 日本
日本是世界上较早使用鱼雷和自行研制鱼雷的国家之一。19世纪末, 日本在中日甲午战争和日俄海战中首先大量使用了从国外购买的鱼雷。 1910年, 其自行研制的第一型43式鱼雷问世, 使日本进入世界鱼雷生产国之列。第二次世界大战前, 日本鱼雷有了较大发展, 研制出了20多种新型鱼雷。其中, 1933年研制的93式氧气鱼雷, 直径为610 mm, 航速49 kn, 航程为20 km, 是当时直径最大、速度最快、航程最远的鱼雷。二战后, 日本战败, 鱼雷事业一度萧条。20世纪50年代中期, 日本建立海上自卫队, 靠购买美国鱼雷供部队使用。虽确立了自行开发国产鱼雷的方针, 但自行研制仅处于起步摸索阶段。60年代初, 日本经济逐渐恢复, 在美国的支持下开始重建鱼雷工业, 在防卫厅下成立了第五(鱼雷)研究所承担鱼雷研制工作, 并确立长崎制造厂、日立制造厂、神户制钢厂、日本电气和三中电气等为鱼雷及其发射装置的生产基地, 又在相模湾建立了鱼雷靶场, 从而形成鱼雷科研、生产和试验一条龙体系。
纵观日本战后几十年鱼雷的发展, 一方面紧跟美国, 尽可能引进美国当时先进的鱼雷; 另一方面在消化、借鉴美国先进鱼雷技术的基础上开展独立研制, 力图在动力等关键性能方面赶超美国。例如日本89式鱼雷, 它是一型反潜反舰通用重型鱼雷, 于70年代初参照美国MK48Mod1型鱼雷研制, 于1989年定型小批量生产并服役, 其能源动力系统采用酒精+H2O2、具有强制排气功能的斜盘活塞机动力系统, 满足航速40 kn和55 kn双速制工作, 最大工作深度为900 m, 混合航程50 km。由于酒精+H2O2双组元燃料比OTTO-II单组元燃料能量密度更高, 使得89式鱼雷的性能甚至优于MK48Mod1型鱼雷。又如日本97式鱼雷, 它是一型轻型反潜鱼雷, 于80年代初参照美国MK50鱼雷研制, 采用Li+SF6能源闭式循环动力系统。2012年, 日本开始研发新一代GRX-6潜用重型鱼雷, 其最突出的特点在于能源动力技术, 由于采用了氢氧能源, 可使航程提高至80 km, 航深提高至1 200 m。
1.2 UUV能源动力技术
1.2.1 美国
美国海军迄今已开展多项装备攻击型核潜艇的UUV项目计划, 包括近期水雷侦察系统(near- term mine reconnaissance system, NMRS)、远期水雷侦察系统(long-term mine reconnaissance system, LMRS)、任务重组式UUV(mission reconfigurable UUV, MRUUV)、大直径MRUUV(large diameter MRUUV, LDMRUUV)以及“曼塔”(Manta)探索型UUV等。图4为美国研制的各型UUV。

图4 美国研制的各型UUV
进入21世纪后, 美国海军提出“21世纪海上力量”战略构想, 计划将在2030年前组建一支由2 000艘不同级别UUV组成的水下舰队, 主要用于浅海、近岸、港口处对敌情报搜索和侦查监视, 进行反潜战和反水雷作战, 满足国防和反恐需求[7]。2004年, 美国海军又发布了新的UUV发展规划, 提出为适应长期情报监视、侦查或作战需求, 需研发长续航力、高可靠性的能源动力系统, 将现有UUV续航力从10~40 h提高至几天甚至几周[8]。在上述需求的刺激下, 美国的民用UUV公司开始涉足军用UUV领域并获得成功, 例如Remus系列、Bluefin系列UUV均是从民用成熟产品改进而来, 其动力电池普遍采用锂离子电池。但锂离子电池的能量密度提升空间有限, 为满足UUV未来发展需求, 可实现更高能量密度的燃料电池逐渐受到美国海军重视[9]。
1) 锂离子电池
锂离子电池是现在应用最为广泛的电池之一, 其具有比能量高、电动势高、循环使用寿命长、无记忆效应等优点。自1990年日本将锂离子电池商品化以来, 其优越的性能获得了世界各国的关注。21世纪初, UUV开始应用锂离子电池, 其航速和续航力都得到了一定程度的提高。随着锂离子电池技术的进步, 其性能提升的同时成本进一步降低, 并逐步替代银锌电池等成为UUV普遍使用的电池。例如美国的REMUS系列和Bluefin系列UUV(见图5)均采用了锂离子电池[10]。

图5 Bluefin-12D UUV及其锂离子电池
2) 燃料电池
2011年, 美国发布了2项燃料电池动力UUV项目, 分别为大直径UUV(large displacement UUV, LDUUV)创新性海军样机项目和长航时UUV (long endurance UUV, LEUUV)未来海军能力项目。LDUUV项目旨在研制一型直径48 inch(约1.22 m)的大排水量UUV, 通过港口布放和回收, 可在公海潜航或在近海执行超视距任务。LDUUV项目要求燃料电池容量达到1.8 MWh, 比能量达到1 000 Wh/L, 从而将续航力增加至70 d, 期间可加注燃料实现多次启停[11]。LEUUV项目旨在研制一型直径21 inch(约0.53 m) UUV, 要求其燃料电池动力系统比能量达到300~500 Wh/L, 续航力30 h, 期间可加注燃料实现多次启停[12]。2012年, 美国海军研究局分别向General Atomics公司、Sierra Lobo公司、UTC公司、Nextech材料公司、Lynntech公司、Fuel cell Energy公司等多家公司和研究机构授予合同, 为LDUUV和LEUUV项目研发燃料电池动力系统, 相关研究进展归纳如下。
a. 20世纪90年代, United Technologies Cor- poration公司(后更名为International Fuel Cells公司)在美国国防部高级研究计划局的资助下研制了由4个质子交换膜燃料电池组成的15 kW推进系统, 拟应用于48 inch(约1.22 m)直径的UUV。该系统已完成了500 h实验室测试, 但未进行海上实航试验[13-14]。
b. 2012年, 美国海军研究署授子Fuel cell Energy公司380万美元研发合同, 用于为LDUUV研制固体氧化物燃料电池动力系统。该系统以JP-l0燃油和液氧为燃料, 可产生1 800 kWh的电能, 满足LDUUV航行70 d的需求。Fuel cell Energy公司已完成280 kW固体氧化物燃料电池研制和28 000 h寿命测试[15]。
c. General Atomic公司和Infinity公司联合研制了用于LDUUV的5 kW质子交换膜燃料电池动力系统。其中: Infinity公司负责研制燃料电池, 其特点是采用了先进的被动排水技术和简化的辅机设计[16]; General Atomic公司负责研制铝水反应制氢装置, 已完成40 h不间断测试[17]。
d. 2014年, Nextech公司(后更名为Nexceris公司)研制了用于LEUUV的固体氧化物燃料电池动力系统, 采用JP-l0燃油和液氧为燃料, 可提供2.5 kW输出功率和40 h续航时间[18]。
e. Lynntech公司研制了用于LEUUV的质子交换膜燃料电池动力系统, 采用硼氢化钠和H2O2作为燃料。燃料电池产生的水可与硼氢化钠反应产生氢气[19]。
f. 2011年, API公司研制了氯酸钠制氧装置, 可产生50 kg氧气。该制氧装置随后与Nextech公司的固体氧化物燃料电池动力系统集成, 并应用于LEUUV[20-21]。
g. Sierra Lobo公司在LEUUV项目资助下研制了质子交换膜燃料电池动力系统(见图6), 采用液氢和液氧作为能源, 燃料电池输出功率10 kW, 续航时间85 h。 Sierra Lobo公司针对液态氢氧能源突破了套管式反应预热、多层绝热、低温液体质量传感器、脉冲管式冷却等关键技术, 结合Teledyne公司专门研发的质子交换膜燃料电池, 使燃料电池动力系统的比能量达到350 Wh/kg以上[22]。
图6 Sierra Lobo公司研制的LEUUV及其燃料电池
1.2.2 德国
德国ATLAS Elektronik公司研发了著名的“海鳍”鱼雷。2001年, 该公司启动了DeepC UUV的研制工作[23]。DeepC UUV有3个相连的舱室, 1个是载荷舱, 另外2个动力舱各装有1个质子交换膜燃料电池(见图7)。该燃料电池由ZSW公司研制, 每个燃料电池含30个电池单体, 输出功率1.8 kW。氢气和氧气分别储存在35 MPa和25 MPa的气瓶中, 可提供140 kWh的总能量[24]。
1.2.3 法国
法国HELION公司是核电巨头AREVA集团的子公司。2005年, 该公司启动了IDEF UUV的研制工作(见图8)。该UUV采用的质子交换膜燃料电池由63个电池单体组成, 输出功率1.5 kW, 额定工况下效率约为55%。该燃料电池安装在一个充满氮气的密封容器内, 使其在惰性环境中工作, 以防止气体泄漏和氢氧混合爆炸。氢气和氧气分别储存在30 MPa和25 MPa的气瓶中, 可提供36 kWh的总能量。2009年10月, IDEF UUV共进行了7次下潜航行试验, 2次试验间隙采用标准的氢氧气瓶为其加注燃料, 氢氧加注时间均不超过1 h, 显著小于电池充电所需时间[25]。
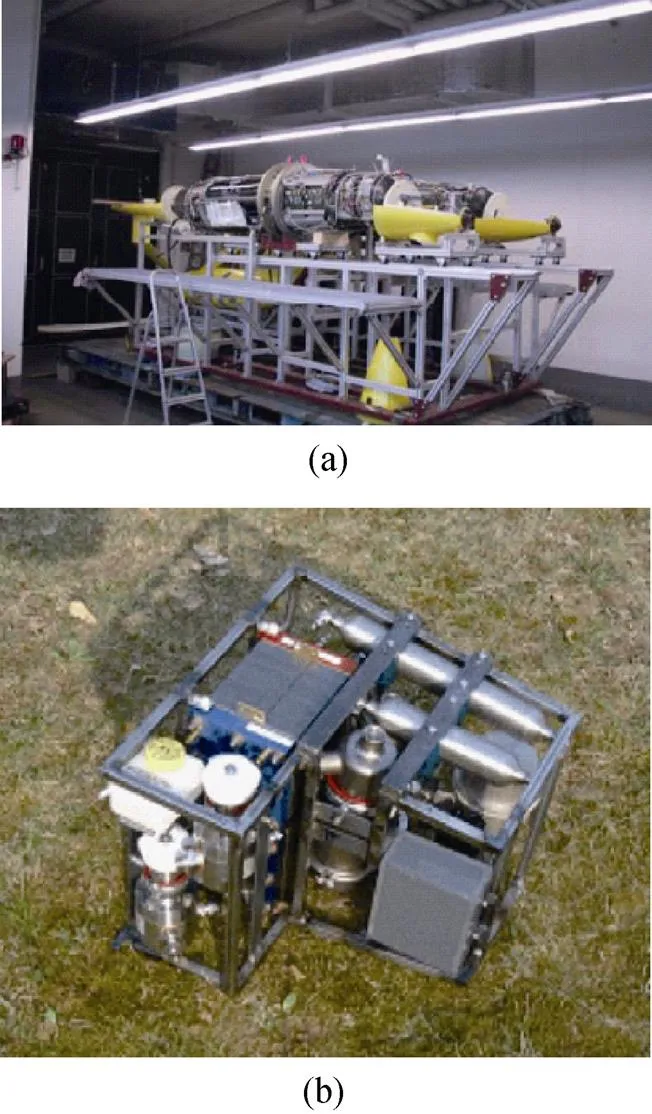
图7 DeepC UUV及其燃料电池
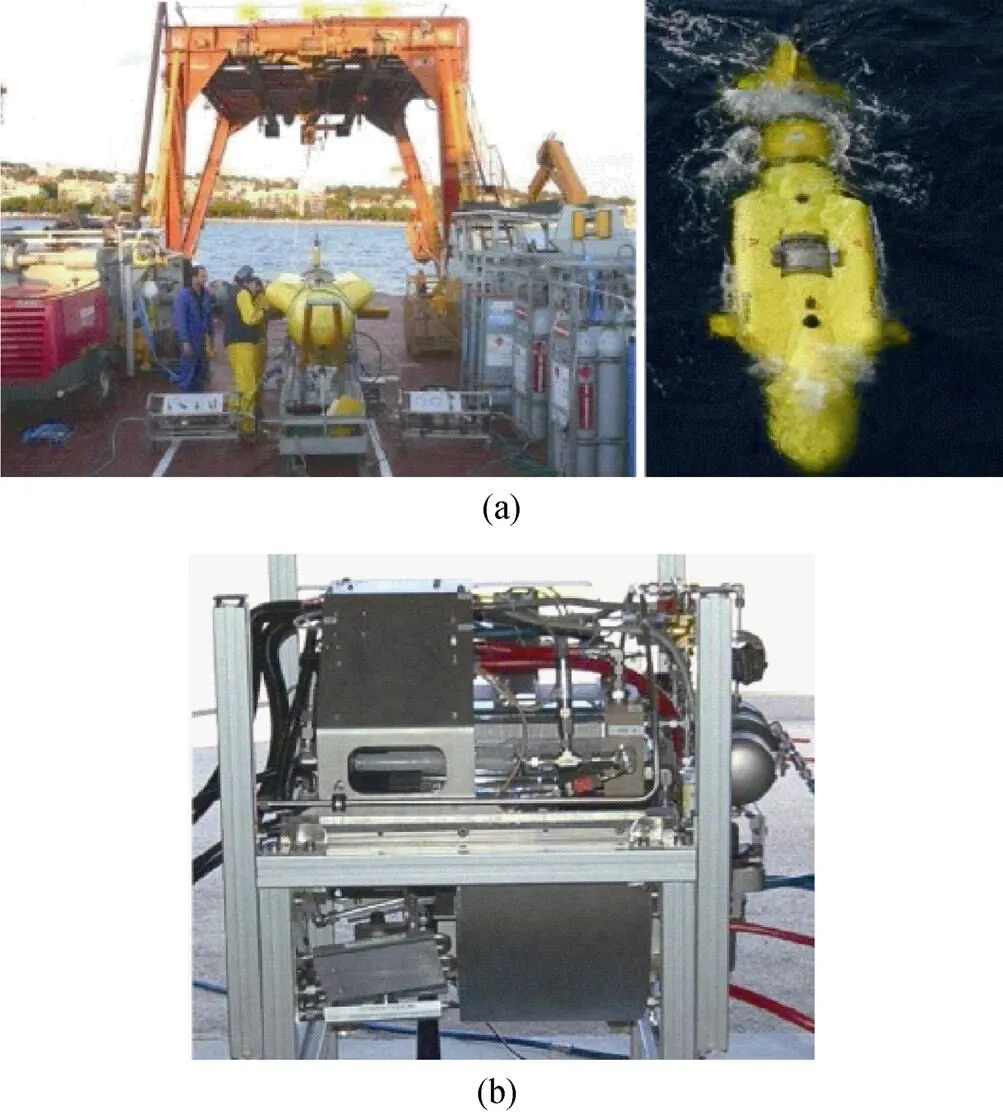
图8 IDEF UUV及其燃料电池
1.2.4 日本
日本三菱重工从1998年开始研制Urashima UUV(见图9)[26]。该UUV采用2个2 kW的质子交换膜燃料电池, 利用金属氢化物为燃料电池供氢[27]。为防止氢气泄露, 采用2个钛金属壳体的压力容器将燃料电池和金属氢化物分别包裹。氧气储存在容积0.5 m3、压力为14.7 MPa的高压罐中。在2005年2月的海试中, Urashima UUV创造了单次航行317 km的新纪录, 所用航时为56 h, 平均航速约为3 kn, 航深800 m[28]。
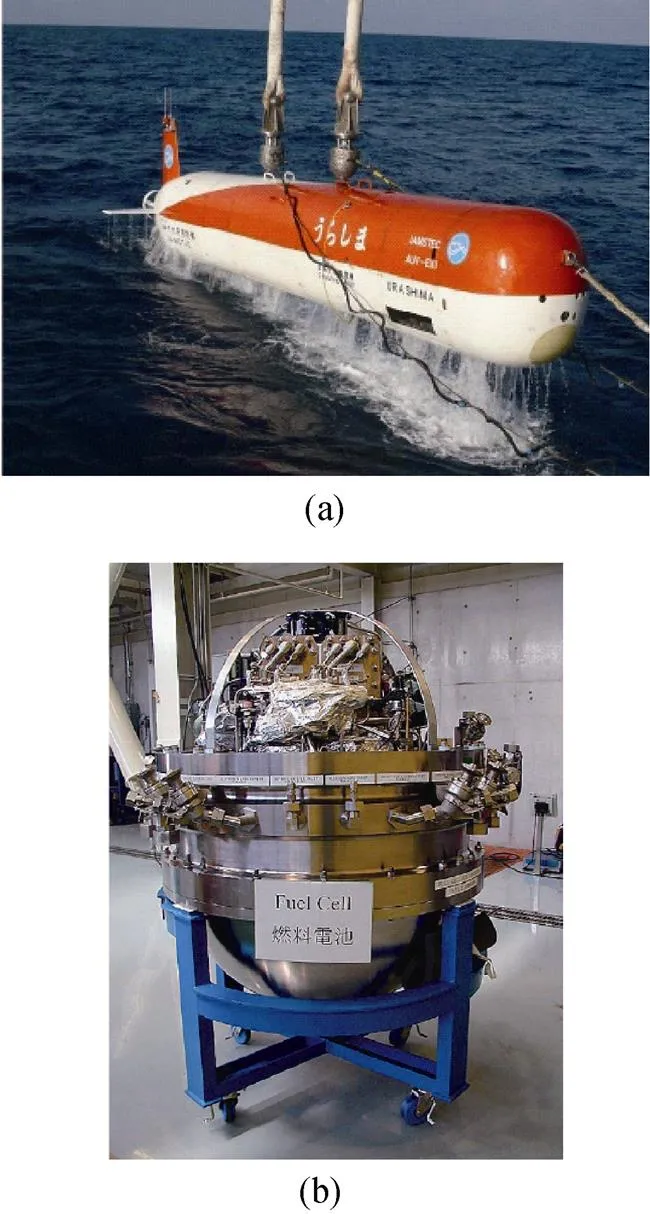
图9 Urashima UUV及其燃料电池
2 水下攻防武器能源动力技术发展趋势
从未来水下攻防作战任务需求出发, 水下攻防武器正朝着“更快、更远、更深、更静”的方向发展, 同时也对能源动力系统提出了独特的要求。分析水下攻防武器能源动力技术发展现状, 其技术发展目标始终围绕寻求更高能量密度的新能源和更高功率密度的新动力。其中, 新能源必将受到格外的重视, 新能源的应用必将牵引新动力的开发, 从而带来水下攻防武器新的变革。
2.1 高能量密度新能源技术
2.1.1 热动力能源技术
各种热动力能源性能参数及优缺点分析如表1所示。通过分析得到热动力能源的发展趋势如下。
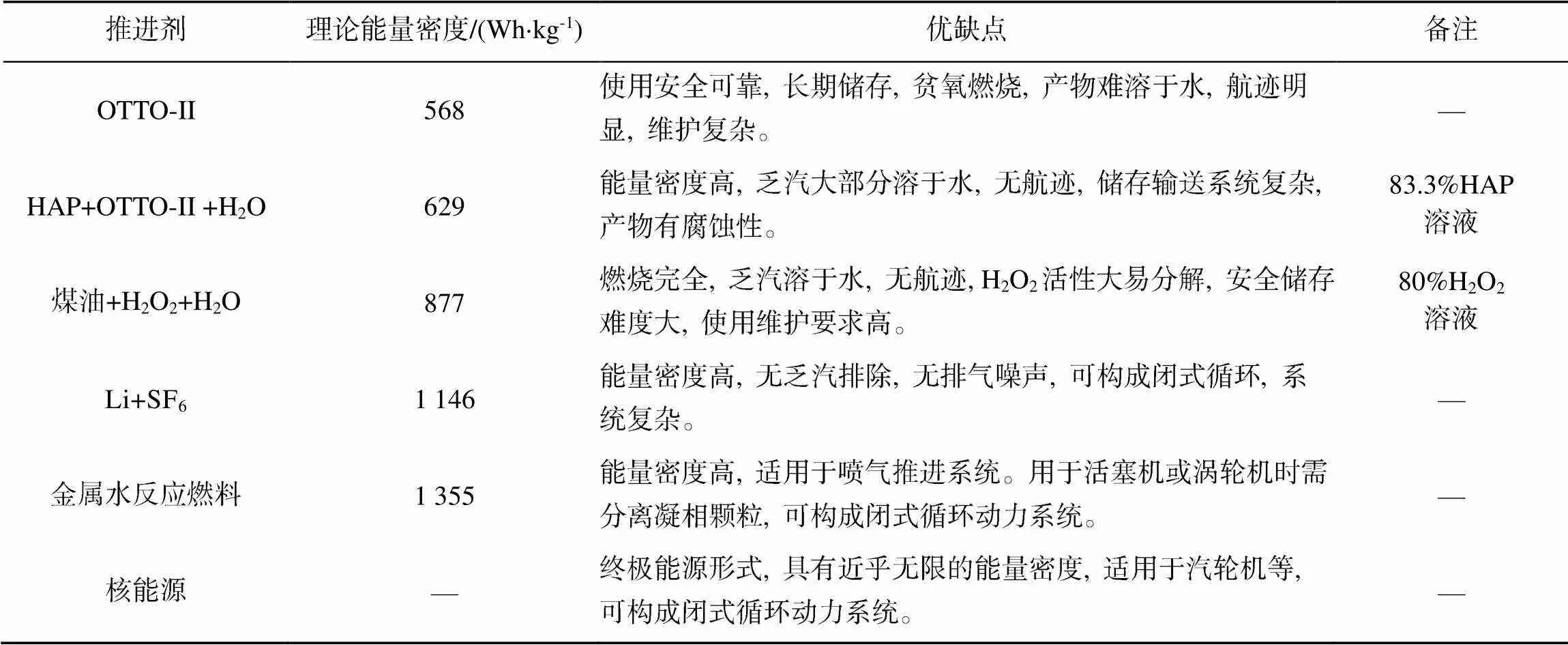
表1 热动力能源性能参数及优缺点
1) 鱼雷
OTTO-II单组元燃料一直是鱼雷使用的主要能源, 其有利于简化能源供应系统, 但能量密度提升空间有限。
三组元燃料(H2O2+煤油+海水、OTTO-II+HAP +海水)的能量密度高于单组元燃料, 且具有良好的航迹隐身性, 但会增加能源供应系统的复杂性。三组元燃料的未来发展重点是安全性较好的OTTO- II+HAP+海水三组元燃料。
Li+SF6(锅炉反应器)、金属水反应燃料均是以活泼金属为基础, 其能量密度比三组元燃料更高, 且可实现动力系统的闭式循环工作, 降低成本后是未来鱼雷新能源开发的主攻方向。
核能源具有近乎无限的能量密度, 是战略型鱼雷的终极能源, 可使鱼雷具备跨洲际打击能力。
2) UUV
Li+SF6韦克(Wick)燃烧的热管反应器, 可与兰金循环汽轮机、布雷顿循环涡轮机、斯特林发动机等组成闭式循环动力系统, 适用于UUV小功率、长时间工作的应用场合, 其能量密度比较高, 是UUV能源的发展方向之一。
2.1.2 电动力能源技术
各种电动力能源的理论比能量如表2所示。通过分析得到电动力能源的发展趋势如下。
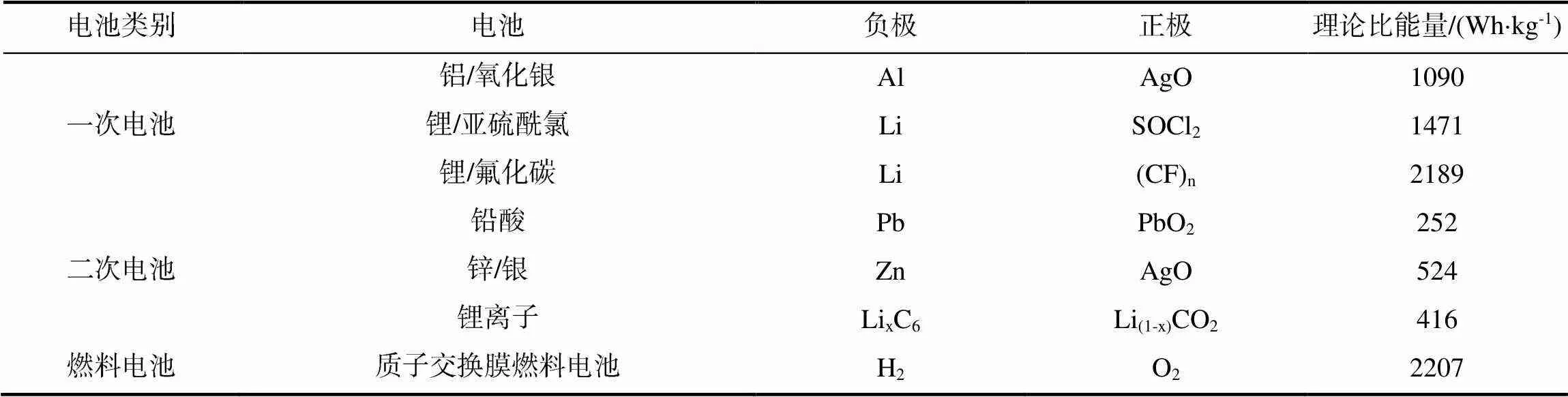
表2 电动力能源性能参数
1) 鱼雷
各国海军现役的鱼雷动力电源主要为水系贮备一次动力电池, 如Mg/AgCl电池、Mg/CuCl电池、Zn/AgO电池、Al/AgO电池等。虽然水系贮备一次动力电池受制于稳定工作电压偏低, 导致其质量比能量较有机体系能量密度低; 但水系电池电导率较高、热容大的优势能帮助其在大功率成组时具备更高的体积比能量, 且较易实现电池组的热管控。
以Li/CFx电池、贮备式金属氧化物锂电池等为代表的有机体系高能电池虽然具有更高的能量密度, 但其在有限体积内大功率电池组高速工况下容易热聚集, 进一步解决热管理问题后, 可能成为未来鱼雷动力电源的主要发展方向。
2) UUV
各国海军现役的UUV电源主要为锂离子电池, 具有比能量高、电动势高、循环使用寿命长、无记忆效应等优点, 将会长期用于UUV。
燃料电池的能量转换效率比热机高2~3倍, 而氢氧能源是目前可预见的能量密度最高的非核能源, 燃料电池结合氢氧能源可实现高于一次电池和二次电池的能量密度, 是极具潜力的UUV动力电源。
2.1.3 混合能源技术
1) 热-电混合能源
热动力能源和电动力能源可构成热-电混合能源, 具有技术成熟度高、使用成本便宜等优点, 是UUV的能源方案之一, 例如美国海军近期采购的波音公司“虎鲸”UUV即采用了柴油/锂电池混合能源系统。
2) 电-电混合能源
燃料电池和大倍率一次电池可构成电-电混合能源, 充分利用氢氧能源能量密度高、燃料电池能量转化效率高的特点, 提高航程; 另一方面, 利用一次电池功率密度高、放电倍率大的特点, 提高航速。这种电-电混合能源既有高能量密度高, 又有高功率密度, 是水下攻防武器动力电源的重要发展方向。
2.2 高功率密度新动力技术
2.2.1 热机技术
热机发展重点在于开发体积紧凑、质量轻、功率大、效率高的原动机, 其具体发展趋势分析如下。
1) 鱼雷
活塞发动机的燃料经济性和深度特性较好, 对深度的变化不敏感, 但受鱼雷尺寸、质量和材料机械性能等限制, 进一步提高功率十分困难。目前, 轻型鱼雷活塞发动机功率可达100 kW级, 重型鱼雷活塞发动机功率可达500 kW级。
涡轮发动机结构相对简单、输出功率大、工作可靠, 可大幅提高鱼雷航速。目前, 重型鱼雷涡轮发动机功率可达1 000 kW级, 采取减振降噪措施后涡轮发动机的振动能级将显著低于活塞发动机。另外, CO2超临界工质涡轮发动机采用布雷顿热力循环, 可大幅提高功率密度和能量转换效率, 是未来涡轮发动机的重点发展方向。
金属燃料水反应发动机属于固液混合的火箭发动机, 可直接推动鱼雷在水下航行, 使鱼雷航速达到200 kn以上, 适用于超空泡鱼雷。
2) UUV
兰金循环汽轮机、布雷顿循环涡轮机、斯特林发动机等可构成闭式循环动力系统, 结合Li+SF6(热管反应器)等新型能源, 可以实现比锂电池+电机更高的能量密度和功率密度, 是UUV动力系统的发展方向之一。
2.2.2 电机技术
1) 鱼雷
永磁同步电机具有功率密度高、效率高、噪声低等优点, 功率密度可实现3.0 kW/kg以上, 将成为未来5~10年甚至更长的一段时间内鱼雷推进电机的主要发展方向。
集成电机推进器是一种将电机移出鱼雷壳体外直接同推进器组合的新型推进装置, 具有高功率密度、高效率、安静等特点, 其功率密度可达5.0 kW/kg, 是极具潜力的发展方向之一。
2) UUV
低速、大扭矩的永磁同步电机是目前国外无人潜航器普遍采用的推进电机方案, 相较于无刷直流电动机, 永磁同步电机在低速性能、噪声特性、转矩脉动等方面均表现更出色, 因此在未来一段时间内仍是UUV推进电机的主要发展方向。
集成电机推进器的高功率密度、高效率、安静等特点也适用于UUV, 故也是UUV推进电机的重点发展方向。
3 结束语
进入21 世纪, 水下攻防作战逐渐显示出无人化和体系化的特点, 要求水下攻防武器具备远航程、宽速域和大深度的能力。相应的, 水下攻防武器能源动力技术则围绕高能量密度能源、高功率密度动力两大主题发展。此外, 水下攻防武器的声隐身与维修保障性也与能源动力系统密切相关。
1) 远航程: 远航程可以充分保证发射平台的安全性, 提升对敌威慑效能。实现远航程的根本在于高能量密度的能源, 应着重开发高能电池、氢氧燃料电池等新型能源, 并探索微型核能源在水下攻防武器的应用。
2) 宽速域: 宽速域可使水下攻防武器适应不同作战任务需求, 满足水下攻防作战的体系化、网络化及协同化要求。因此, 应积极开发高能电池动力系统、涡轮发动机动力系统以及适应超高速需求的金属水反应冲压发动机动力系统。
3) 大深度: 深海是地球上未被充分开发利用的区域, 必将成为未来海上军事斗争的主战场。应积极开发适应大深度的半闭式循环、闭式循环动力系统, 以及全海深电池。
4) 声隐身: 声隐身对水下攻防武器的作战效能有着决定性的影响, 因而是当前水下攻防武器最为关注的技术指标之一, 而能源动力系统是最主要的振动噪声源之一。随着探测技术的发展, 振动噪声控制频率应进一步向低频、高频延伸, 实现全频域的声学定量设计。
5) 维修保障性: 通过模块化设计实现不同水下攻防武器的能源动力系统通用化可以减小维修保障负担。此外, 能源动力系统在设计时应充分考虑维修保障性, 尽可能延长大中期检修周期, 实现一次维修多次循环使用。
[1] 李宗吉, 高永琪, 王树宗, 等. 现代鱼雷-水下导弹[M]. 北京: 兵器工业出版社, 2016.
[2] 吴晓海. 美国MK48系列鱼雷发展历程带给我们的启示[J]. 鱼雷技术, 2006, 14(3): 7-9.
Wu Xiao-hai. Inspiration from the Developmental Process of US MK48 Series Torpedoes[J]. Torpedo Technology, 2006, 14(3): 7-9.
[3] 傅金祝. 苏联/俄罗斯水中兵器的发展[J]. 现代舰船, 2007(9): 34-37.
[4] 卢军, 陈立强, 崔和. 先进的多任务轻型鱼雷MU90[J]. 鱼雷技术, 2006, 12(1): 57-60.
Lu Jun, Chen Li-qiang, Cui He. Advanced multi-role lightweight torpedo MU90[J]. Torpedo Technology, 2006, 12(1): 57-60.
[5] 邹宇. 来自罗马的“黑鲨”鱼雷-意大利白头公司研制的重型鱼雷[J]. 国际展望, 2003(24): 73-75.
[6] 李伟, 刘海光, 王华荣. 德国战后第2代重型鱼雷技术发展研究[J]. 舰船科学技术, 2020, 42(11): 185-189.
Li Wei, Liu Hai-guang, Wang Hua-rong. The Development of the Second Generation of Heavy Torpedo after the War II in Germany[J]. Ship Science and Technology, 2020, 42(11): 185-189.
[7] 路骏, 白超, 高育科, 等. 水下燃料电池推进技术研究进展[J]. 推进技术, 2020, 41(11): 2450-2464.
Lu Jun, Bai Chao, Gao Yu-ke, et al. Progress on Underwater Fuel Cell Propulsion Technology[J]. Journal of Propulsion Technology, 2020, 41(11): 2450-2464.
[8] U.S. Navy. The Navy Unmanned Undersea Vehicle Master Plan[R]. USA: U.S. Navy, 2004.
[9] 蔡年生. UUV 用动力电池现状及发展趋势[J]. 鱼雷技术, 2010, 18(2): 83-85.
Cai Nian-sheng. Review of Power Battery for UUV with Development Trends[J]. Torpedo Technology, 2010, 18(2): 83-85.
[10] 龚锋, 王力. UUV用动力锂电池综述[J]. 船电技术, 2013, 8(33): 17-20.
Gong Feng, Wang Li. Reviews of High Power Lithium Batteries Powered UUV[J]. Marine Electric & Electronic Engineering, 2013, 8(33): 17-20.
[11] U.S. Navy. Large Displacement Unmanned Undersea Vehicle System[R]. USA: U.S. Navy, 2011.
[12] U.S. Navy. Long Endurance Undersea Vehicle Propulsion[R]. USA: U.S. Navy, 2011.
[13] Rosenfeld R L, Prokopius P R, Meyer A P. Fuel Cell Power System Development for Submersibles[C]//Pro- ceedings of the 1992 Symposium on Autonomous Underwater Vehicle Technology. Washington DC, USA: IEEE, 1992.
[14] Meyer A P. Development of Proton Exchange Membrane Fuel Cells for Underwater Applications[C]//Proceedings of OCEANS’93. Victoria, BC, Canada: IEEE, 1993.
[15] None. FuelCell Energy Wins US Navy Contract to Develop UUV Power[J]. Fuel Cells Bulletin, 2012(8): 4.
[16] Malone M. Infinity-Air Independent Fuel Cells[EB/OL]. [2020-02-05].http://www.infinityfuel.com/products/air-independent-fuel-cells.
[17] Bever D. Energy and Power System for ONR’s LDUUV Program[C]//Fuel Cell Seminar and Exposition. Uncasville, CT, USA: General Atomics, 2012.
[18] None. Nextech Wins ONR Contract to Develop UUV Energy System[J]. Fuel Cells Bulletin, 2012(6): 4-5.
[19] Rhodes C, Fenimore J, Hennings B. Long Endurance Fuel Cell Energy System for Unmanned Undersea Vehicles[C]//Fuel Cell Seminar and Exposition. Uncasville, CT, USA: General Atomics, 2012.
[20] Swartz S L, Arkenberg G B, Thrun L B, et al. SOFC Based UUV Energy System[C]//Fuel Cell Seminar and Exposition. Uncasville, CT, USA: General Atomics, 2012.
[21] Presley K. A New Oxygen Source for SOFC Based Power Systems for Long Duration UUVs[C]//Fuel Cell Seminar and Exposition. Uncasville, CT, USA: General Atomics, 2012.
[22] Stoops B N. Navy SBIR/STTR Success[EB/OL]. [2013- 03-01]. http://www.navysbir.com/docs%20/Sierra_final_ onr.pdf.
[23] Hornfeld W. DeepC-the German AUV Development Project[EB/OL]. [2005-01-10]. http://www.deepc-auv.de/de epc/bibliothek/pdf/South_eng.pdf,
[24] Hornfeld W. AUV DeepC-Technology Platform for the ATLAS Elektronik AUV Family[C]//23rd International Conference on Offshore Mechanics and Arctic Engineering. Vancouver, CA, USA: OMAE, 2004.
[25] Raugel E, Rigaud V, Lakeman C. Sea Experiment of a Survey AUV Powered by a Fuel Cell System[C]// IEEE/OES Autonomous Underwater Vehicles. Monterey, CA, USA: IEEE, 2010.
[26] Yoshida H, Hyakudome T, Ishibashi S, et al. A Compact High Efficiency PEFC System for Underwater Platforms[J]. ECS Transactions, 2010, 26(1): 67-76.
[27] Yoshida H, Hyakudome T, Ishibashi S, et al. A High Efficiency PEFC System Development for Long-Range Cruising Autonomous Underwater Vehicles (LCAUVs)[J]. ECS Transactions, 2009, 17(1): 241-250.
[28] Toshio M, Shinji I, Kazuhisa Y, et al. Development of Fuel Cell AUV “URASHIMA”[J]. Mitsubishi Heavy Industries Technical Review, 2004, 21(1): 1-5.
Development Status and Trend of Energy and Power Technology for Underwater Attack and Defensive Weapon
SHI Xiao-feng1, DANG Jian-jun2, LIANG Yue1, HU Li-min1, LU Jun1, QIAO Hong1
(1. The 705 Research Institute, China State Shipbuilding Corporation Limited, Xi’an 710077, China; 2. School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China)
As the heart of underwater attack and defensive weapons, energy and power systems have a significant impact on mission scope and operational effectiveness. In this study, the requirements of underwater attack and defensive weapons on energy and power systems are analyzed. The development progress of energy and power technology is summarized with emphasis on the torpedo and unmanned undersea vehicle(UUV). The technical expertise of the USA, Russia, Japan, and European countries is introduced. Finally, the trends of the energy and power technologies are discussed in terms of thermal propulsion energy, electrical propulsion energy, thermal engines, and electrical motors. In general, modern underwater attack and defensive warfare involve unmanned and systematized operations, which require a long cruise range, wide speed range, and large diving depth of underwater weapons. Accordingly, energy and power technologies are being developed with an emphasis on high energy density and high power density.
underwater attack and defensive weapon; energy and power system; torpedo; unmanned undersea vehicle
TJ630.32
R
2096-3920(2021)06-0634-14
10.11993/j.issn.2096-3920.2021.06.001
史小锋, 党建军, 梁跃, 等. 水下攻防武器能源动力技术发展现状及趋势[J]. 水下无人系统学报, 2021, 29(6): 634-647.
2021-10-20;
2021-11-02.
史小锋(1965-), 男, 研究员, 中国船舶集团高级专家、中国船舶集团有限公司第705研究所科技委主任, 主要研究方向为水下航行器能源与动力技术.
(责任编辑: 陈 曦)
