船舶领域粒子图像测速技术的发展及应用
2022-01-14郭春雨徐菁菁韩阳王超郐云飞
郭春雨,徐菁菁,韩阳,王超,郐云飞
哈尔滨工程大学 船舶工程学院, 黑龙江 哈尔滨 150001
0 引 言
流场测试试验为流场结构分析、流动规律认识、流场控制等研究提供了有力支撑。在现代船舶水动力实验中,流场测量主要包括烟线法、纹影法以及热线/热膜流速测量、超声波多普勒测速、激光多普勒测速、激光散斑全场测速、相位多普勒粒子分析等方法技术。然而,这些流场测速方法技术往往无法定量研究流场、干扰流场或者只能用于单点测量等。随着对船舶流场的深入研究,对于水面、水下船舶的设计优化、推进器的性能等研究也逐渐深入,学者们愈加关注细观流场的物理特性,精确获取流场全面信息的需求更加迫切。流场的精细获取是实现流场流动信息精细化和深入揭示流场物理现象、流动细节及作用机理的必要手段。在第25届国际拖曳水池会议(ITTC)[1]上,为便于全球学者开展流体力学的基础研究,成立了精细流场测量研究组。对于船舶领域精细流场的研究,粒子图像测速(particle image velocimetry, PIV)技术可在不扰乱流场的情况下准确测量流场的瞬态流动信息。PIV可获取三维瞬时速度场以量化流场精细流动信息与流动特征,使船舶设计及水动力性能优化更加简便易行。
本文将介绍PIV的方法原理、概述PIV图像处理技术的研究进展,并分析PIV技术在船舶领域的应用情况。
1 PIV介绍
1984年Adrian[2]提出了一种非接触式精细流场测量技术,即PIV技术。PIV测试原理是在布满均匀示踪粒子的待测流场中通过激光器发射激光,并使用柱面透镜形成激光片光源;片光源将带有示踪粒子的流场照亮,由图像采集设备进行光学成像以记录流场中粒子的运动。最后,由计算机及各种图像处理算法对采集到的图像进行处理分析,即可得到待测流场的流动信息,如图1所示[3]。图中,Δt为时间变量,ΔX为粒子的位移距离,l1和l2为测试中的任意2张图像,S为光学成像时的物距,S′为光学成像时的像距。d1A为一个像素的边长。

图1 PIV原理[3]Fig.1 Principle of PIV[3]
粒子图像测速系统主要由图像采集系统及激光照明系统组成。图像采集系统最初基于胶片成像,通过双重图像曝光来获取流场信息,而这种基于胶片的成像技术通常1天只能获取1~2幅二维流场数据,流场信息获取效率很难满足对复杂流场的细致分析需求。20世纪90年代,电荷耦合元件(CCD)相机成像技术问世,10 帧/s的图像采集速度(每秒传输帧数(fps))甚至更高的图像采集效率极大拓展了粒子图像测试技术的应用领域。进入21世纪,随着CCD相机的发展以及互补金属氧化物半导体(CMOS)相机的出现,相机的图像采集速度有了质的飞跃,每秒传输帧数可达106量级。图像采集系统的发展使PIV在获取高分辨率图像的同时增加了时序流动特性捕捉能力。此外,激光照明系统的发展同样支撑了PIV的飞跃:由连续激光器逐步发展为具有高能量输出、高激发频率、低脉冲间隔的双脉冲高频激光器;铜蒸汽激光、氦−氖激光、红宝石激光、半导体激光以及氩离子激光等照明技术的发展,也从光学波长角度极大丰富了PIV在实验室环境下的应用场景。如今,PIV系统可以轻易地在1 s内纪录成千甚至上万张高分辨率的粒子图像。这种PIV系统被称为时间分辨粒子成像测速系统(time-resolved PIV,TR-PIV),它不仅大大提高了流场测量效率,而且可以通过时间分辨率的解析解决测量过程中的瞬态问题。飞速发展的硬件系统为大批量、高精度的图像处理带来了更大的挑战。在TR-PIV试验过程中,需要保证高速相机的充分曝光,进而需要保证激光器的脉冲能量充足,这对激光器的要求较高。同时,在试验过程中会产生大量的试验数据图像,然而目前无法实现数据的实时高速传输。
随着对精细流场信息需求的不断增长和相机成像技术及计算机图像解析技术的快速发展,PIV由二维发展到三维。三维PIV分为立体PIV( stereoscopic particle image velocimetry,SPIV)、全息PIV ( holography PIV,HPIV)、层析PIV(tomographic PIV,Tomo-PIV)。立体PIV技术运用2个相机进行流场图像采集,采用片光照明方式,进行图像处理重构,得到三维流场速度分量。这种PIV本质上依旧是二维PIV。而全息PIV结合了PIV和全息技术,是真正意义上的三维流场测速技术。但全息PIV使用过程中存在粒子定位信息不精准、位移精度不高、光学元件产生噪声等问题,使全息图像质量较低,试验结果精度下降。如何提高全息PIV技术的测量精度还有待研究。
层析PIV是运用多个相机进行流场图像采集,并通过光学层析成像算法及三维互相关算法进行图像重建,得到流场的三维速度矢量场。层析PIV原理如图2所示[4]。在层析PIV测试中,存在如何充分利用光源能量、使照明区域亮度均匀、合理确定照明区域面积等问题,如何获取清晰有效的待测流场图像信息亟需研究。

图2 层析PIV原理示意图[4]Fig.2 Schematic diagram of tomographic PIV [4]
2 PIV图像处理
PIV图像处理方法主要有杨氏条纹法、相关分析法[5]等。由于采用杨氏条纹法进行图像处理存在速度方向的二义性、速度测量范围小等问题,而相关分析法的原理简单且流场计算精度更高,因此相关分析法被广泛应用并被不断改进。
相关分析法包含自相关分析法、互相关分析法及光学相关分析法。自相关分析法是通过条纹图案的傅里叶变换产生空间自相关函数:

式中:I为光的强度;r为平面中测量点的位置;∆r为图像中各粒子之间的位移向量。
自相关算法测得的流场速度方向具有二义性[6]。而Marzouk等[7]提出的非对称自相关函数很好地解决了PIV图像中速度方向的二义性问题。
Westerweel[8]对互相关分析法进行了较为全面的分析,互相关分析法可用于2个序列相似性的度量,以一维离散信号为例,相关函数的定义为

式中:f1(i)和f2(i+x)为2个一维离散信号。
互相关分析法的原理是对于连续曝光的2帧图像,在第1帧图像中定义一个询问窗口,通过互相关函数式(2)查找相关性最大的匹配方向,来确定第2帧图像搜索区域中与之匹配的第2个窗口的位置。

式中:f和g为不同时刻的图像函数。
采用互相关分析法时,需要将图像划分成多个窗口,通过互相关函数对每个窗口进行计算,由此可见,该方法的计算量十分庞大,需要大量的窗口匹配及函数计算。为提高互相关分析计算的效率,鲍晓利等[9]提出了一种改进的基于快速傅里叶变换(FFT)的互相关算法,并利用CCD相机连续采集多帧粒子图像进行了算法对比验证及分析。实验结果表明,改进算法的运算效率提高了约12.25%。
基础的互相关算法虽然原理较简单,但存在一定的不足。由于代入函数中数的取值问题,其计算结果只能是近似值。一般采用质心法、抛物线拟合法及高斯拟合法等计算相关函数峰值的亚像素差值,以提高测量精度[10]。在互相关计算分析中,由于存在噪声等问题,一些窗口的估计值与真实值有出入,使得在流场计算中存在较大误差。王灿星等[11]在二维PIV图像处理中通过互相关技术针对误对应速度向量的判断和消除准则问题进行了研究。孙鹤泉等[12]基于PIV的频域实现了利用频域滤波技术对速度矢量合理构造后的错误矢量进行了修正。阮晓东等[13]从流体的连续性角度出发,提出了一种自动检测粒子图像测速数据中误矢量的算法,该算法采用Delaunay网格技术对删除点进行插值,进而得到全流场的瞬态速度矢量。在图像处理中,速度场中坏矢量的识别与修正通常是分开实现的。高琪等[14]介绍了一种基于本征正交分解(POD)的粒子图像处理技术,该技术通过迭代方法实现了速度场坏点的统一识别和修复算法。为获得更高空间分辨率的速度场,Scarano等[15]提出了基于图像变形的多重网格迭代算法 (window deformation iterative multi-grid,WIDIM)。这种算法通过图像变形来缩小迭代过程中判读窗口的尺寸和间隔,进而提高速度场的空间分辨率。Jia等[16]提出了一种PIV图像预处理方法,该方法能在图像处理过程中将弯曲界面周围的粒子图像条拉伸成矩形,然后在指定处通过自适应算法进行计算。这种图像预处理方法比传统的WIDIM方法具有更高的空间分辨率。
相关分析法中的光学相关分析是采用光学变换产生粒子图像的自相关,通过对光学数据进行二次光学变换得到图像处理需要的相关函数,对待测流场进行计算分析。
随着成像技术的发展和计算机软件算法的不断更新,精细流场的三维流场测量技术逐渐成为流场测量的主要研究对象,三维流场的图像处理算法研究也成为热门课题。王灿星等[17]对三维PIV图像后处理进行了研究,建立了一种基于互相关技术的三维PIV图像处理方法。孙凯[18]结合实际PIV测量的需要,在传统体视PIV算法的基础上提出了一种新的角度位移布局的体视PIV算法。该算法在对原始图像进行校正的基础上,结合标定计算切面的三维速度。针对运动粒子在具有一定体积的流场中透视成像后易出现的运动重叠问题,以及粒子测速系统中空间点立体匹配难、空间信息难以表示的问题,杜海等[19]根据空间粒子图像的特点,基于双目视觉原理对粒子图像测速仪的匹配技术进行了研究,并提出了基于遗传算法的三维粒子图像匹配方法及优化设计方法。
随着人工智能技术的发展,蔡声泽等[20]提出了基于深度神经网络的粒子图像测速算法。该算法借鉴用于运动估计的光流神经网络,采用人工合成的粒子图像数据集进行监督学习训练,从而获得适用于流体运动估计的深度神经网络模型。试验证明,该算法的测量精度更高,计算时间更短,空间分辨率更高。
3 PIV在船舶中的应用
船舶的流场测量分析是一个复杂而重要的问题。船舶的绕流场、伴流场等是评价其稳性、快速性、操纵性等性能的重要依据。PIV将流体力学中宏观的力与力矩的研究问题转变为精细流场的研究,这为学者研究流动机理和流动细节等提供了很大帮助。PIV技术也为船舶的设计优化、船舶推进器的性能优化等提供了重要技术支持。
3.1 基于PIV的水面船舶绕流场研究
Dong等[21]在拖曳水池中应用二维 PIV技术对船模艏波的流场结构进行了研究,该研究开启了精细流场测试在船舶领域的广阔天地。自2009年起,每2年举行1次的先进模型测量技术国际会议,展示了PIV等先进流场测试方法在船舶与海洋工程领域的应用成果。
爱荷华大学水利科学与工程研究院(IIHR)[22]对不同工况下的DTMB5415船模精细流场进行了测量,获得大量的精细流场数据。首先,应用二维二速度分量(2D-2C)PIV技术,对DTMB 5415船模在静水、波浪及横摇工况下的绕流场进行了测试研究;并重构测量数据,得到了三方向的速度、雷诺应力及湍流特征等参数。此外,IIHR应用二维三速度分量(2D-3C)PIV技术,对DTMB 5415船模在动态操纵下的流场进行了测量,水下PIV测试装置如图3所示[22]。IIHR的研究团队[23-27]基于以上测试研究结果建立了试验流体动力学(EFD DATA)数据库。Seo等[28]应用PIV对KVLCC标准船模多截面的二维速度场进行了测量,并对其速度场和流动特征等进行了分析。Falchi等[29]应用PIV对双体船斜航状态下的精细流场进行了测量,测量结果显示了船体斜航下的泻出涡结构等流动特征。

图3 水下PIV装置[22]Fig.3 Underwater PIV device[22]
层析PIV可用于研究船舶的三维流动精细流场,测量空间内所有方向的速度、雷诺应力等流动特征。IIHR的Yoon等[30]在拖曳水池中应用三维三速度分量(3D-3C)层析PIV对DTMB 5415船模绕流场进行了测量。
应用PIV技术进行船模绕流场测试的试技术相对成熟。近年来,随着PIV技术的发展,其开始被应用于实船绕流场精细测量。为探索实船航行性能,意大利学者基于PIV 技术对Nave Bettica号军舰舭龙骨绕流场进行了测量[31-33],这对PIV技术在实船中的应用具有重要意义。 同时,需指出的是,实船流场测试也存在诸多问题。例如,实船实尺度条件下拍摄范围和激光强度受限、实际海域环境杂质难以剔除、目标区域系统标定问题、实海域粒子图像的自适应优化问题等。基于PIV的实船绕流场进行测试分析有待进一步研究。
艉流场是船舶绕流场中非常重要的部分,其体现了船舶推进器的性能。基于PIV技术对船舶艉流场进行测量,可以为船舶快速性能、推进性能评估提供重要依据。同时,通过PIV,螺旋桨盘面伴流场分布特征、艉流场区域的流动分离、漩涡结构的空间分布等研究也有了新进展。Felli等[34]应用层析PIV对螺旋桨毂涡、梢涡以及桨后流场进行了测量。佘文轩等[35]为了解决船舶艉流场复杂流动机理认知难题,在拖曳水池中应用大型水下三维粒子图像测速系统(图4),对设计工况下不同截面处的船舶艉流场进行了测量,结果如图5所示。图中,Y轴与Z轴坐标、螺旋桨半径R、轴线速度u与航速U均做了无量纲处理,由图可见舭涡、螺旋桨毂帽涡以及“钩状”速度等值线等流动结构。
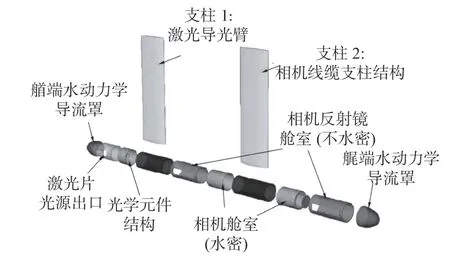
图4 SPIV系统结构分解示意图[35]Fig.4 SPIV system structure decomposition[35]

图5 不同截面位置处的船舶艉流场PIV测量图[35]Fig.5 PIV measurement diagram of ship stern flow field at different section positions[35]
3.2 基于PIV的水下航行器绕流场研究
潜艇作为典型的水下航行器,在水下航行时,其各项性能(操纵性、隐蔽性、快速性等)尤为重要。应用PIV技术对潜艇在水下航行时的精细流场进行测量,可以获得潜艇周围流场的速度场、涡量场等。
在潜艇精细流场测量中,潜艇在自由表面下的浸深、潜艇的适航装置、粒子的布撒、激光器的角度、PIV测量系统中的高速摄像机等都影响着精细流场的测量。Fu等[36]应用PIV在旋臂水池中对美国海军研究局(ONR)的Body-1潜艇模型进行了精细流场测试,并研究了潜艇的流场控制。相较于随车式PIV,固定式PIV试验的测量截面与船舶坐标系的横截面不一致,导致固定式PIV具有一定的局限性。Fureby等[37]对于水下航行器精细流场的测量研究也具有指导意义(图6)。
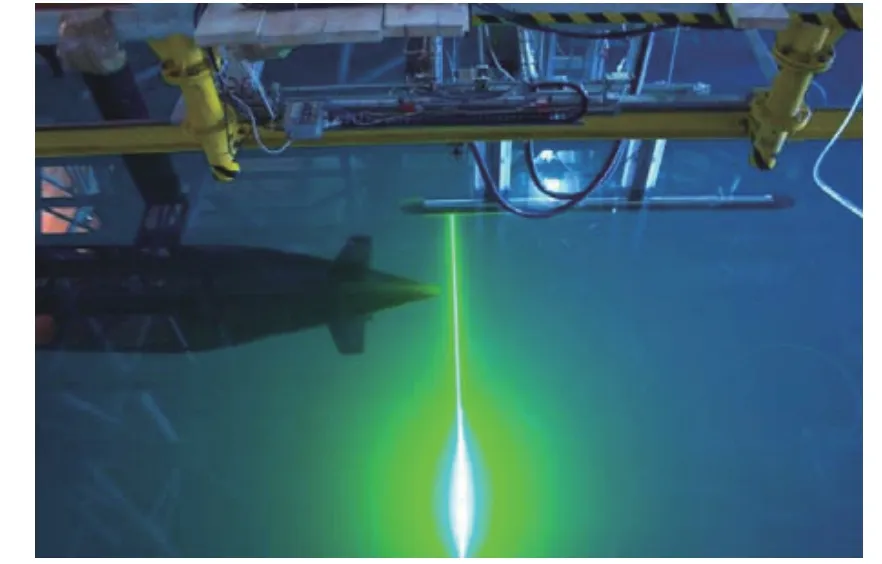
图6 基于SPIV的水下航行器流场测量[37]Fig.6 Flow field measurement of underwater vehicle based on SPIV[37]
除了在水池中对水下航行器的流场进行研究外,di Felice[38]在低速风洞中应用PIV对不同工况下潜艇的周围流场、湍流特性及涡结构等流场特性进行了测量研究,并将测量结果与数值模拟结果进行了对比分析。
在国内对于水下航行器的PIV测试研究中,赵峰等[39]应用PIV对水下航行体5种细部变化的艉附体与主回转体连接形式的设计模型进行了测试分析,并且借助流场不均匀度系数定量评估了推进器所在剖面的伴流场。其研究结果对水下航行器艉附体和推进器的设计优化具有指导意义。
3.3 基于PIV的船舶空气流场研究
以舰船为例,其空气流场是舰载机的起降环境及舰载机海上作业的主要场所。在作业中由于受到自然风、舰船运动及其上层建筑等因素的影响,空气流场十分复杂。复杂的空气流场为舰载机起降增加了难度,其中“徒壁效应”和“台阶效应”等现象的空气流场使舰载机的操纵变得尤为困难。应用PIV准确测量舰船空气流场,对于保障舰载机海上作业的安全性及舰船空气流场的特性研究具有重要意义。
舰船空气流场研究为舰载机起降的安全性提供了保障,包括为舰载机的起降路线提供指导、规避起降风险。Wadcock等[40]应用PIV技术对串联旋翼直升机和舰船空气流场进行了三维速度场测量,详细描述了串联旋翼直升机在同一着陆点和不同零偏航角下机−舰耦合的空气流场的流动特性,测量结果为旋翼机舰上作业的规划提供了指导。赵维义义[41]应用PIV测试技术在实验室的风洞中对舰船空气流场进行了测量。试验表明机库及上层建筑物对飞行甲板上方区域的流场影响较大。
船舶空气流场研究也为船舶设计优化做出了贡献,对于一部分船舶而言,空气流场的品质是影响其水动力性能的重要因素。Rahimpour等[42]采用1:522的极地破冰船模型,对甲板上方空气流场进行了试验研究,应用PIV获得了多个截面的定量流场数据,并比较了均匀流和模拟大气边界层对破冰船空气流场流动结构的影响。Bardera等[43]应用PIV对不同风向下的LHD模型的船舶空气流场进行了测量研究,对比分析了数值计算与试验结果,试验装置如图7所示。孙寒冰等[44]应用PIV对在相同风速、不同风向角下的某型客滚船的空气流场进行了研究,分析船舶所受阻力的变化,得到了不同风向角下流场速度矢量图,试验时相机安装如图8所示。

图7 模型船在风洞中的试验示意图[43]Fig.7 Schematic diagram of model ship test in wind tunnel[43]

图8 PIV试验时相机安装[44]Fig.8 Camera installation during PIV test [44]
4 结论及展望
为了通过更高效率、更精确的方式获取真实的流场信息,使PIV能更有效地服务于船舶工程领域,PIV硬件系统、PIV图像处理技术、以及PIV技术在船舶领域的应用方面仍有待改进。
在PIV测速硬件系统方面,图像采集系统及激光照明系统的参数条件较成熟,但设备成本较高,导致高端PIV系统的普及陷入瓶颈。目前,国内外常用的PIV系统有2种:一种是由连续激光器和高速相机组成的具有高时间分辨率的TRPIV系统,其可高效、高精度地对非定常流场进行动态二维测量;另一种是由双脉冲激光器、2台高速相机组成的低频SPIV系统,其可实现待测定常流场平面内的时均三维速度矢量的获取。高端PIV系统,例如全息PIV、层析PIV等仅在国内外极少数大型实验室得以应用。未来硬件系统的发展趋势将集中在2个方向:其一,降低硬件设备成本,这将是PIV系统广泛应用于中小研究机构的必要途径;其二,在保证时序测量的基础上,大力发展可获取高分辨率大范围体空间流场信息的PIV系统,以扩展图像获取的空间分辨率和空间尺度水平,尤其在体空间流场的测试领域,目前层析PIV的测量区域普遍较小(空间厚度在10 mm左右),近壁面流场获取困难,无法获取具有强烈三维空间特性的流场信息。
PIV系统的应用扩展不仅仅依赖于硬件设备的发展及设备成本的降低,更重要的是图像处理算法的精进与普及。目前,PIV图像处理普遍采用的是WIDIM算法,但该算法以判读窗口为最小单位进行速度矢量计算,针对小尺度流动结构与近壁面流动细节的计算精度并不理想。各PIV系统公司在这些方面也争相取得突破,但拥有应用于空间流场信息计算算法的研究机构少之又少,如果可降低空间流场算法的计算门槛与资源消耗,将会极大程度地推动各类PIV系统的普及与应用。上述算法仅针对速度矢量这种最低阶的流场信息的计算,在未来的算法发展中,更高阶流动信息的获取,例如漩涡分布、压力分布、湍流特性、模态分解等,将更有利于流场本质的获取与分析。此外,流场分析与信号处理技术的交汇碰撞、深度学习在PIV粒子图像处理领域的应用、多相流边界层的自动掩膜等,均有可能实现更高效、更高精度的流场信息捕捉。
在国内船舶与海洋工程领域,PIV在精细流场的测试与研究中的应用仍处于起步阶段,还存在一些复杂的流动问题有待进一步研究。例如:物体抨击入水、近自由面气液两相流动、螺旋桨及泵喷等旋转机械内流场测试、流动机理角度分析空泡空化、高速射流与微气泡流动测试、水下爆炸冲击载荷及气泡脉动等问题。应用PIV可深入探索上述问题,进行复杂流场精细化测量,从流动机理的角度探究及优化流场品质。
