基于HSV色彩空间和Otsu算法的无人机影像植被覆盖度自动提取
2022-01-12赵晓宇陈建军张凯琪覃巧婷尤号田韩小文
赵晓宇, 陈建军,2*, 张凯琪, 覃巧婷, 尤号田,2, 韩小文,2
(1.桂林理工大学测绘地理信息学院, 桂林 541006; 2.桂林理工大学广西空间信息与测绘重点实验室, 桂林 541006)
植被是陆地生态系统重要的组成部分之一,在维护生态系统平衡、涵养水源和保持水土等方面具有重要作用[1]。植被覆盖度(fractional vegetation cover,FVC)是描述地表植被分布的重要参数,通常定义为统计范围内植被(包括叶、茎)垂直投影面积所占的百分比[2],其变化关系到生物量、净初级生产力、植被叶面积指数等生态指标和反射率、发射率、土壤湿度等地表参数,是植物群落覆盖地表状况的一个综合量化指标,在分析植被分布影响因素、评价区域生态环境等方面意义非常重大[3],是区域生态系统研究的重要指标之一[4-5]。
植被覆盖度测量方法主要有地表实测法与遥感监测法[6-7]。地表实测法主要包括目估法、采样法和仪器法等,该方法在样方尺度精度较高,但其受人力和物力等条件限制,采样范围有限,很难反映面上的时空变化特征,因此,在实际应用中具有很大的局限性[8-9]。卫星遥感影像由于覆盖范围大,能较好地反映区域特征,经常被用于区域植被覆盖度反演[10-11]。然而,受限于卫星遥感影像的空间分辨率,当前卫星遥感植被覆盖度反演精度有限。随着无人机遥感技术的不断发展和普及,使得超高空间分辨率的遥感影像的获取成为可能,并已被广泛应用于生态环境领域[12-13]。
目前,无人机遥感影像已被应用于植被覆盖度提取研究,其采用的方法主要有分类法、阈值分割法等。如Natesan[14]将无人机可见光影像与多光谱传感器数据结合,采用监督分类对植被与人工地物进行了分类;Tuhtan等[15]基于像素的监督分类与非监督分类,对无人机RGB(red,green,blue)影像覆盖空间区域内的水体、裸地、植被进行了识别,但是都没有对植被与非植被进行针对性的提取。而Yan等[16]以植被近地面的纯像元作为判别标准,对无人机RGB影像进行色彩空间的转换,再使用阈值分割提取植被覆盖度;Yi[17]通过人机交互采用超绿植被指数阈值分割法对无人机可见光影像进行了植被覆盖度的提取,该方法需要人工调整阈值,以确定最佳分割阈值。陈祖刚等[18]采用RGB阈值法、HSV(hue, saturation, value)判别法、RGB决策树法对数码相机拍摄的草地照片进行植被覆盖度提取,并使用Java软件开发了相应的Android软件,但因土壤背景颜色不同,精度数据不同于以往研究。刘艳慧等[19]利用过绿植被指数基于最大熵-遗传算法,估算草地植被覆盖度,但需要将无人机影像数据进行一定的预处理。综上,目前针对无人机影像植被覆盖度提取的研究中,仍缺乏一种准确高效全程自动的提取方法。分类法与阈值分割法都需要人机交互完成,该过程不仅耗费时间,其结果也受主观影响;同时,数据预处理也将耗费一定时间。针对该问题,提出一种全自动的高精度和高效率的被覆盖度提取方法,为无人机遥感影像植被覆盖度快速提取提供方法支撑。
1 材料与方法
1.1 研究区域概况
研究区域位于青海省果洛藏族自治州,地理坐标介于97°54′E~101°50′E,32°31′N~35°40′N,平均海拔4 200 m以上,属于大陆性高原气候。受气候影响,该区域自然环境类型多样,高寒植被分布广泛,包括高寒草甸、高寒草原、高寒沼泽、高寒灌丛、高山稀疏植被、常绿针阔叶林等[20],其中高寒草甸是源区最主要的植被覆盖类型。
1.2 无人机影像数据获取
于2018年7月下旬在黄河源区开展了野外数据采集工作,该时间段植被生长茂盛,能较好地反映当地生态环境现状。野外数据采集主要是利用无人机航拍获取高分辨率航拍影像,所使用的无人机型号为中国大疆公司生产的Phantom 3 Professional,该款无人机搭载了轻型数码相机Sony EXMOR Sensor,其拍摄的影像包含3个波段(分别为红、绿、蓝3个波段),有效像素为1 240万。在影像获取时,相机垂直向下,无人机飞行高度设为20 m。获取的单张影像覆盖地面范围为35 m×26 m,地面空间分辨率约为1 cm,影像能非常清晰地分辨出植被和非植被。由于研究区的主要植被类型为草甸,因此,选取高寒草甸和沼泽草甸为研究对象,并分别选择了5个植被覆盖度梯度作为实验样地(表1),进而使研究结果更具有普适性。
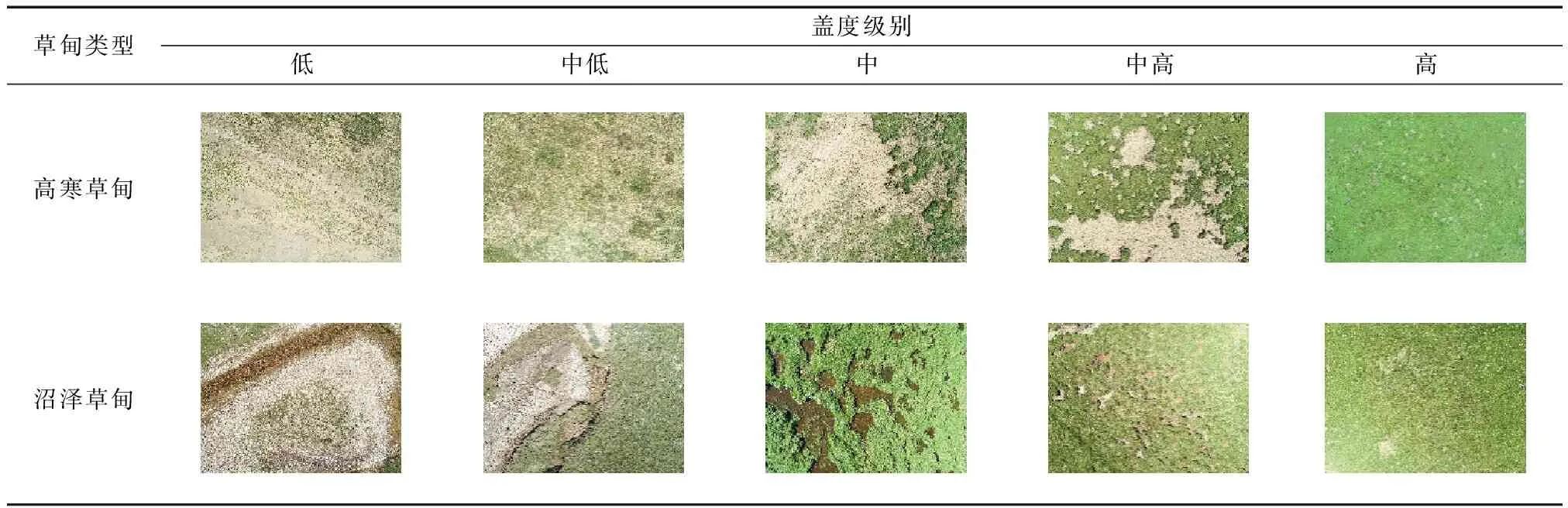
表1 两种草甸类型五个植被覆盖度梯度航拍影像Table 1 Aerial images of five vegetation coverage gradients of two meadow types
1.3 研究方法
1.3.1 真实植被覆盖度获取
运用基于JAVA编译的斑块分类软件Pixel Based Manual Classifier V1(PBMC)[17]提取无人机航拍影像植被覆盖度信息,以该软件的提取结果作为该影像的真实植被覆盖度。该软件使用超绿指数EXG(EXG=2G-R-B,R、G、B分别代表3个波段的辐亮度值) 结合OpenCV图像识别功能,通过人工选取阈值对植被斑块与裸地斑块进行提取,并计算植被斑块所占像素数量与影像总像素数量之比得出植被覆盖度。其所使用的植被指数能很好地增强植被信息,增强植被斑块提取效果,已被广泛应用于高分辨率影像的植被覆盖度信息提取[21-22],因此,该软件所得结果有效可靠。
为进一步评估该方法的精度,邀请了10位实验人员对同一张影像进行植被覆盖度信息提取。经统计,10位人员进行植被覆盖度提取所选取阈值的均值为125,波动范围不超过±5,不同阈值对应的植被覆盖度提取结果值为54.187±0.573。该结果表明,该软件提取结果准确度高,阈值和植被覆盖度波动小,可用作参考值。
1.3.2 最大类间方差法
传统最大类间方差法[23]是由日本学者大津(Nobuyuki Otsu)于1979年提出的,是一种自适合于双峰情况的自动求取阈值的方法,又叫大津法,简称Otsu。它是按图像的灰度特性,将图像分成背景和目标两部分。当背景和目标之间差别越大时,错分概率越小。
最大类间方差法简单有效、适用范围广,但是它对噪声与目标大小十分敏感,且当目标和背景灰度差不明显时,会出现大片的黑色区域,甚至会丢失整幅图像的信息,产生比较严重的分割错误。因此,在实际应用中常使用改进的最大类间方差法,该方法首先将图像进行滤波处理,减小噪声影响;再分别用最大类间方差法确定图像的最佳阈值;然后采用边缘检测算子(sobel) 进行边缘检测,将差分算子与图像进行卷积,确定图像的边缘位置,检测边缘特征;最后根据边缘检测的结果将灰度变化急剧的地方用局部阈值分割,其他部分采用最大类间方差法[24]。
相比基于机器学习、深度学习[25]的分割方法,最大类间方差方法在面对背景与目标两者分割的情况下用时更短,可采用非监督的方法在两类间搜寻阈值并进行分割,而机器学习与深度学习对样本选择的要求较高,学习过程也需要花费大量时间,所以采用最大类间方差算法为基础算法。
1.3.3 植被指数分割法
植被指数是对地表植被状况的简单、有效和经验的度量,被广泛地应用在全球与区域土地覆盖、植被分类和环境变化等方面,基于植被指数阈值分割的植被覆盖度提取是当前的主流方法[26]。由于当前无人机搭载的相机多为普通相机(只包含红、绿、蓝3个波段),因此,选取4种常用的可见光植被指数(NGRDI、NGBDI、EXGR、EXG,见表2)作为植被覆盖度提取的驱动数据,结合自适应的最大类间方差算法,利用MATLAB编程软件,完成基于植被指数计算的判别。该过程可以计算图像全部像素对应的植被指数,并且通过Otsu算法自动生成最佳阈值,根据阈值对图像进行植被与非植被的分割。

表2 所使用的可见光植被指数Table 2 Common visible light vegetation index
1.3.4 基于HSV色彩空间的Otsu法
HSV色彩空间是根据颜色的直观特性创建的一种颜色空间, 也称六角锥体模型。该色彩模型中颜色的参数分别为色调(hue,H)、饱和度(saturation,S)、亮度(value,V)[30]。HSV因其具有比RGB色彩空间更强的直观性,能更直接地表达色彩的明暗,色调,以及鲜艳程度,方便进行颜色之间的对比,所以在进行色彩的分割时,有更大的优势。HSV颜色模型中的3个分量独立性高于RGB颜色模型中的3个分量。与常用的RGB空间的混合三原色原理不同,由于HSV空间有效地分离了色度、饱和度和亮度,更适合于对人类色彩感觉的描述[31]。因此,采用H分量对无人机影像中的植被进行提取,使用MATLAB编程软件,将RGB影像转换至HSV色彩空间,针对植被凸显性较好的H分量,结合最大类间方差算法,在H分量内自动搜索最佳阈值并进行分割。
2 结果与分析
2.1 不同植被覆盖度提取方法结果对比
根据高寒草甸同一盖度类型不同方法的提取结果(表3)可知,低盖度、中低盖度、中盖度的植被覆盖度提取结果中,NGRDI+Otsu、EXGR+Otsu、NGBDI+Otsu的结果与参考值差距较大, EXG+Otsu与HSV+Otsu的结果与参考值差距较小。同时,在中盖度时,HSV+Otsu结果优于EXG+Otsu,更接近参考值。中高盖度提取结果中,NGRDI+Otsu、NGBDI+Otsu、EXGR+Otsu数值相近,与参考值都存在一定的差距, HSV+Otsu与参考值差距最小。高盖度提取结果中,NGBDI+Otsu、EXGR+Otsu、NGRDI+Otsu与参考值差距均较大, EXG+Otsu和HSV+Otsu结果相对接近,HSV+Otsu仍为最接近参考值的结果。高寒草甸的植被覆盖度提取结果表明,EXG+Otsu与HSV+Otsu均能准确有效的提取植被覆盖度,中低盖度以下时,两者差距较小,在中盖度及以上时,HSV+Otsu方法可以更有效地提取准确的植被覆盖度信息。

表3 高寒草甸植被覆盖度提取结果Table 3 Extraction results of vegetation coverage of alpine meadow
沼泽草甸提取结果(表4)中, NGBDI+Otsu结果在全部5个盖度等级的提取结果中,只有中低盖度的提取结果与参考值差距相对较小,其他4个等级均与参考值不符,有较大差距。而EXG+Otsu结果在低盖度时与参考值有差距,但在中低盖度至高盖度时,其提取结果相较于NGRDI+Otsu、NGBDI+Otsu、EXGR+Otsu有所提高。HSV+Otsu在低至高盖度等级影像的提取结果中,与参考值最接近,在所有方法中精度最高。

表4 沼泽草甸植被覆盖度提取结果Table 4 Extraction results of vegetation coverage of swamp meadow
2.2 不同植被覆盖度提取方法精度评价
根据高寒草甸同一盖度类型不同方法的提取结果(图1),低盖度、中低盖度、中盖度的植被覆盖度提取结果中,NGRDI+Otsu与EXGR+Otsu结果与参考值差距大于20%,EXG+Otsu、HSV+Otsu结果与参考值差距均不超过10%。同时,在中盖度时,HSV+Otsu结果相比EXG+Otsu更接近参考值。中高盖度提取结果中,NGRDI+Otsu、NGBDI+Otsu、EXGR+Otsu与参考值都存在10%以上的差距,EXG+Otsu与参考值差距为3.14%,HSV+Otsu与参考值差距为0.17%。高盖度提取结果中,NGBDI+Otsu、EXGR+Otsu与参考值差距均超过60%,NGRDI+Otsu与参考值差距超过20%,EXG+Otsu和HSV+Otsu结果相对接近,HSV+Otsu仍为最接近参考值的结果,相差0.24%。

图1 高寒草甸盖度结果误差变化Fig.1 Variation of coverage error of alpine meadow
随着高寒草甸类型植被盖度的增加,EXGR+Otsu、NGBDI+Otsu结果误差在盖度级别为高盖度时陡然变大,NGRDI+Otsu的误差随盖度变化无明显趋势,但整体误差高于EXG+Otsu和HSV+Otsu。EXG+Otsu结果误差在中盖度时存在波动,随盖度增加无明显变化规律, HSV+Otsu随盖度增加,误差呈降低趋势,盖度越高,误差绝对值越小。
沼泽草甸提取结果中(图2),低盖度时,NGBDI+Otsu与参考值差距大于20%,EXG+Otsu与参考值差距接近10%,但EXGR+Otsu、NGRDI+Otsu、HSV+Otsu与参考值接近,差距小于5%,其中HSV+Otsu与参考值差距为0.37%。但是在中低盖度至高盖度的提取结果中,NGRDI+Otsu、EXGR+Otsu的结果与参考值差距均大于20%。NGBDI+Otsu结果在中低盖度的提取结果与参考值差距为11.39%,其他盖度与参考值均大于20%,在中高盖度时最大,达到58.88%。EXG+Otsu在中高盖度时误差最大,为17.76%,高盖度时误差最低为7.91%。HSV+Otsu在5个盖度等级影像的提取结果中,中低盖度时误差最大为8.44%,其他盖度等级差距均不超过5%,最接近参考值。

图2 沼泽草甸盖度结果误差变化Fig.2 Variation of coverage error of swamp meadow
随着沼泽草甸类型参考植被盖度的变化,NGBDI+Otsu、EXGR+Otsu结果的误差有明显波动,且存在增大的趋势。NGRDI+Otsu的误差随盖度增加整体呈增大趋势;EXG+Otsu结果的误差随盖度增加先逐渐增大后减小,误差在中高盖度处达到极大值,HSV+Otsu的误差结果随盖度变化,在中低盖度处有极大值,整体无明显波动,但结果误差为最低。
2.3 不同植被覆盖度提取方法提取效率对比
在提取效率上,PBMC软件用时较长,其他方法总体相差不大。植被指数+Otsu方法和HSV色彩空间+Otsu方法用时接近,全部在1~2 s。其中,基于HSV色彩空间+Otsu的高寒草甸从读取到输出结果仅用时1.1376 65 s,沼泽草甸提取从读取图像到输出结果图像与植被覆盖度的时间仅为1.157 134 s。相比PBMC软件,从调整阈值到输出结果图像至少需要20 s以上的时间,基于HSV色彩空间+Otsu方法的计算效率得到一定的提升。

表5 不同植被覆盖度提取方法提取效率Table 5 Extraction efficiency of different vegetation coverage extraction methods
3 讨论
目前针对植被覆盖度的提取,很少有全自动的提取过程,大多基于可见光植被指数进行阈值分割[32]。例如,陈明华等[33]利用多种可见光植被指数进行阈值分割,可有效提取植被覆盖度;郭震冬等[34]利用可见光波段差异植被指数VDVI结合Otsu来区分植被与非植被。利用无人机可见光影像在红绿蓝3个波段进行计算,其包含的计算量要大于单独在H分量内阈值确定的计算量,所需的时间更长。而在HSV色彩空间中,由于3个分量独立性更高,数据冗余小,3个分量之间的干扰性低,因此计算耗时短[35]。且本文研究只需要对H分量进行阈值确定,所需时间少。同时,以往多数研究中基于不同植被指数的阈值分割需要根据经验阈值和人眼识别的结果不断调整,以达到最佳的提取效果,该过程也需要耗费一定的时间。此外,人工操作还存在人为主观判断,进而引入人为误差。本研究中采用HSV色彩空间+Otsu方法,在图像区域内自动寻找最佳阈值,进行分割,全过程耗时较短,不受主观干扰,提高了植被覆盖度提取的效率。
在沼泽草甸类型中,由于植被自身的特殊性,其生长环境周围需要丰富的水源。无人机航摄时,部分水体受镜面反射影响,其反射率较大,易与植被混淆,在Otsu算法计算方差时难以区分,因此产生一定的误差。而将RGB影像转换至HSV色彩空间,影像分割不受像元值影响,错分率较低,与标准值最为接近。同样地,由于高寒草甸是高原鼠兔的主要生活环境,存在着较多的鼠洞,因此植被与非植被边缘存在杂土[36],导致错分率较高。RGB影像中植被与非植被分界处由于受鼠洞附近土壤影响,草甸被土壤覆盖了一部分,因而被分为非植被,而基于HSV色彩空间+Otsu的提取结果中,边界处的植被能较好地被识别,因此提升了准确度。
本研究在植被覆盖度自动化提取方面取得了一定进展,但仍存在一些局限性,但采用的Otsu算法,能够快速计算阈值,但是受噪声影响较大[37]。如果无人机影像中存在噪声,会导致结果准确率降低,因此该方法对影像分辨率要求较高,在低分辨率影像中提取植被覆盖度的准确率仍有待认证。此外,Otsu算法只能针对双峰图像进行阈值的计算,在包含多种差异较大的植被类型影像中,难以应用。为改进这些,后续研究可针对无人机影像先进行去噪处理,或利用局部阈值的计算减弱噪声对Otsu算法的影响,加强算法在多种植被类型影像中的应用。
4 结论
本文提出了一种基于HSV色彩空间+Otsu的图像自动分割方法,运用该算法可以实现对无人机遥感影像植被覆盖度自动提取,克服了传统人工调整阈值方法低效率、易受主观性干扰的缺点。将基于HSV色彩空间+Otsu方法实际应用于植被覆盖度的提取,得出如下结论。
(1)该方法能全程自动识别植被并提取植被覆盖度,结果准确率与真实结果差距在±4%以内。
(2) 该方法耗时均在2 s以内,对比其他方法具有更高准确率、更小的误分率,缩短了时间消耗。
(3)在针对不同植被类型的盖度提取中,该方法较为稳定,适合大区域、大批量无人机航拍影像植被覆盖度提取需求,极大地提高了提取效率,满足实际的提取要求。
因此,该方法可以应用于大规模的无人机遥感影像处理,适用于野外植被调查与监测、植被保护等方面,为生态遥感领域相关研究提取节省时间并得到准确结果。
