一种无刷直流电动机霍尔位置快速确定方法
2022-01-11张稳桥曾晓松魏雪环
张稳桥,曾晓松,魏雪环,刘 勇
(贵州航天林泉电机有限公司,贵州 贵阳 550081)
0 引言
近40多年以来,伴随着电力半导体工业、自动控制技术以及稀土永磁材料的快速发展,无刷直流电动机(以下简称电机)因其高功率密度、高效率、控制方式简单、结构简单、维护方便、运行可靠、寿命长等优点被广泛应用于航空航天、汽车、机器人、家用电器、电动玩具等行业,逐渐取代有刷电机成为工业领域随处可见的伺服装置[1-3]。
从控制方法上区分,电机可分为无位置传感器控制和有位置传感器控制,常用的无位置传感器控制方法为通过检测反电动势过零点从而控制逆变电路中晶体管的通断来实现电子换相[4],该控制方法虽然有减小电机体积、线路简单等优点,但是同时也具有当电机停止或转速很低时,反电动势无法检测或因为电枢反应使得气隙磁场发生畸变从而不能准确地检测到反电动势过零点等缺点。目前,有位置传感器控制方式中,霍尔元件为主要的位置传感器[5]。对于电机中霍尔元件的理论位置分析,吴小江、周灏、谭建成、王萍等已在相关文献[4-7]中作了详细阐述,本文以两相导通星形三相六状态无刷直流电动机为例,旨在提出一种在工程设计中简单快速地判断霍尔元件理论位置的方法,并分析在无刷直流电动机研制过程中影响霍尔元件实际位置的几种因素。
1 直槽电机霍尔元件理论安装位置分析
无刷直流电动机的工作原理可以简单概括为:反映主转子位置的霍尔位置传感器的输出信号,通过电子换向电路去驱动与电枢绕组连接的相应功率开关元件,使电枢绕组依次导电,从而在电枢绕组上产生跳跃式的旋转磁场,该旋转磁场与永磁转子产生电磁感应后,使得转子产生电磁转矩,并使电机以一定转速带动负载旋转。随着转子的转动,霍尔传感器不断输出变化的高低电频信号,以改变电枢绕组的通电状态,使得在某一磁极下导体中的电流方向始终一致,从而实现无接触换流。因此,精准的霍尔元件理论位置对无刷直流电动机实现精准换相有着至关重要的意义。
霍尔元件的理论位置主要由电枢绕组磁势位置决定,具体位置还与电机转向、控制器的控制逻辑真值表、霍尔元件工作原理等因素有关。因此在分析霍尔元件的理论位置前,有必要作出如下约定:
1)霍尔元件为锁存型霍尔集成电路。电机运转时,每个霍尔元件输出信号的占空比为50%,即逻辑1和0各占180°电角度。当霍尔元件标志面朝向磁极N极时,其输出为逻辑1,当霍尔元件标志面朝向磁极S极时,其输出为逻辑0,若霍尔元件标志面背向跟踪磁极,则输出逻辑恰好相反。
2)电机正转时,控制器的控制逻辑与导通方式对应表见表1(A、B、C代表三相绕组),即某相的霍尔元件信号上跳沿出现时,该相绕组开始正向导通,某相的霍尔信号下跳沿出现时,该相绕组开始反向导通。电机反转时,控制器的加电顺序相反。
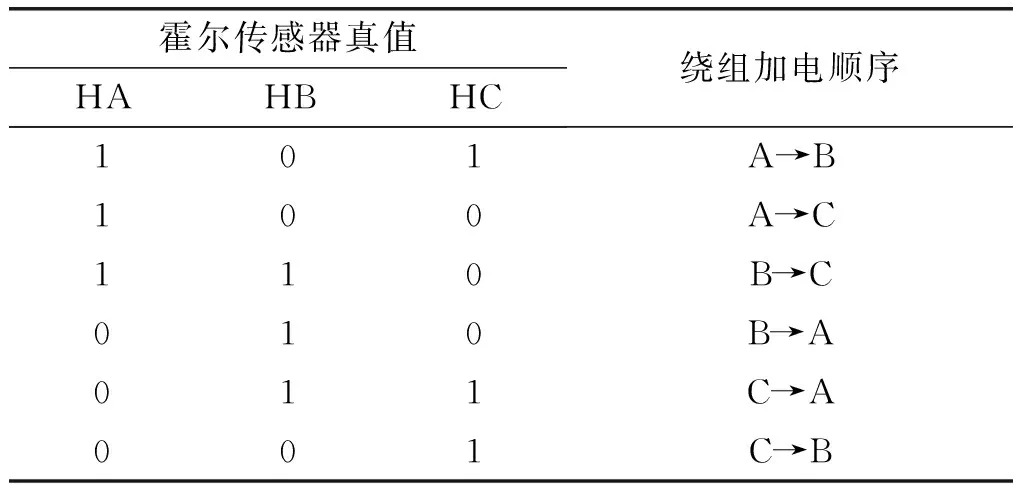
表1 控制器控制逻辑与导通方式对应表
3)若电机有跟踪磁极,则跟踪磁极决定霍尔元件信号的跳变,其极性应和主磁极对应。
1.1 霍尔元件分布与电枢绕组磁势关系分析
基于上述约定,文献[8]中已表明霍尔元件位置分布可通过磁势轴线分布来确定,并详细分析了霍尔元件位置与电枢绕组磁势对应关系,此处不再赘述。为方便读者参考,直接引用其结果,即每对磁极下有两组共六个霍尔元件位置可选择,两组位置恰好相差180°电角度,且这些位置均与三相绕组磁势轴线重合,其对应关系见表2(FA、FB、FC分别代表A、B、C三相对应的正向磁势轴线)。

表2 霍尔元件理论位置与三相绕组磁动势轴线对应关系
1.2 直槽电机三相绕组磁势轴线分布分析
通过1.1节的分析,我们知道了霍尔元件位置与绕组磁势位置相对应,因此在工程设计中,为了快速精准地确定霍尔元件位置,高效准确地分析出绕组磁势分布显得尤为重要。本节分别以12槽4极整数槽电机和9槽6极分数槽电机为例,提出一种能够快速确定电机磁势分布的方法。
1.2.1 12槽4极电机三相绕组磁势轴线分布分析
整数槽电机三相绕组磁势轴线可直接根据右手螺旋定则得出。12槽4极电机为例,绕组展开图如图1所示,分析某相绕组磁势分布时,均假定电流从该相绕组抽头流入,则根据右手螺旋定则易得出其三相绕组磁势分布,如图2所示(说明:图中阿拉伯数字为槽序号,规定磁势方向由电枢内侧指向外为正)。
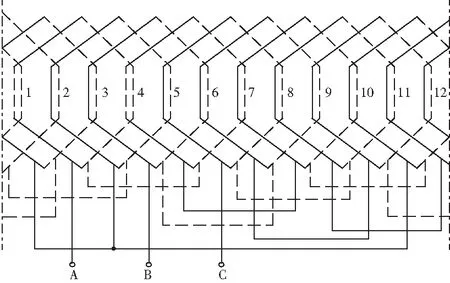
图1 12槽4极电机绕组展开图
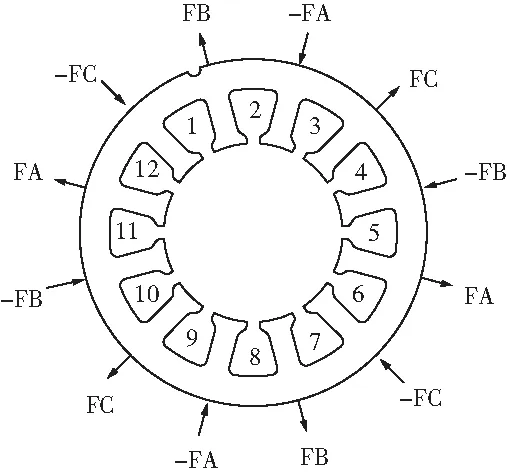
图2 12槽4极电机磁势分布图
1.2.2 9槽6极电机三相绕组磁势轴线分布分析
9槽6极电机为分数槽电机,其绕组磁势判断较整数槽电机复杂,需引入虚拟单元电机的概念:设定子槽数为Z,转子极对数为p,则存在一t值使得Z=Z0t,p=p0t(t为Z和p的最大公约数),原电机由t个单元电机组成。分析磁势轴线分布时,可将单元电机等效为极对数为1、槽数为Z0的电机来分析磁势分布。因此,简化为单元电机后,所有绕组的磁势相量和便是该相绕组的合成磁势。
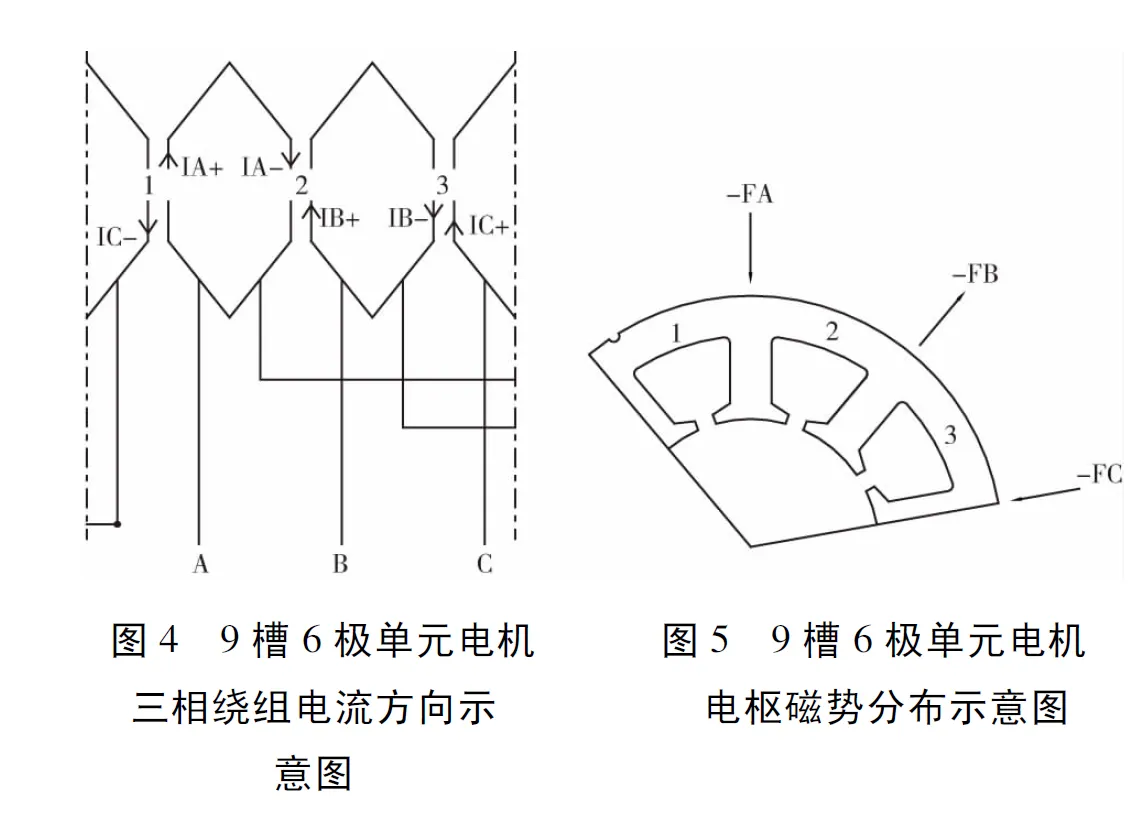
9槽6极电机绕组展开图如图3所示,该类电机极对数为3,因此该类电机可等效为由3个3槽2极的单元电机组成。以1、2、3槽组成的单元电机来分析其磁势轴线分布,假设三相均通入正向电流,则单元电机各相绕组电流方向如图4所示,使用右手螺旋定则得到各绕组磁势分布如图5所示。根据电机绕组分布规律,电枢上相差180°电角度为相反磁势,相差360°电角度为相同磁势,得到9槽6极电机电枢磁势分布如图6所示。
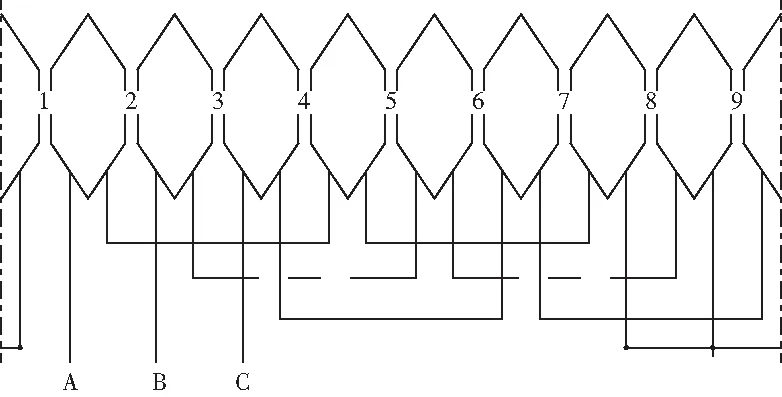
图3 9槽6极电机绕组展开图
上述分析中,磁势位置直接体现在电枢铁芯上,比较直观,方便设计师将常用极槽配合电机的电枢绕组磁势分布图建立成设计平台,作为工具备查,可大大提高霍尔元件位置设计效率。
1.2.3 霍尔元件位置分布规律
从图6容易看出,绕组磁势各间隔60°电角度,可作为霍尔元件对应位置的一组磁势中,三相绕组磁势各间隔120°电角度或者240°电角度。
经分析,在更多极对数的电机中,除上述两种情况外,可作为霍尔元件对应位置的一组磁势间隔角度,还可为480°电角度、600°电角度、840°电角度……由此可以看出,三个霍尔元件间隔角度可为120°电角度的整数倍(去除360°电角度整数倍)。
2 定子铁心斜槽对霍尔元件位置的影响
对于整数槽电机,为了减小齿槽转矩,往往将铁心中相邻冲片的槽错开一定角度,便得到斜槽的铁心。使用斜槽铁心的电枢,绕组磁势分布和使用直槽铁心的电枢必定有差异,从而影响霍尔元件的理论位置。定子铁心斜槽方式共两种,如图7所示。
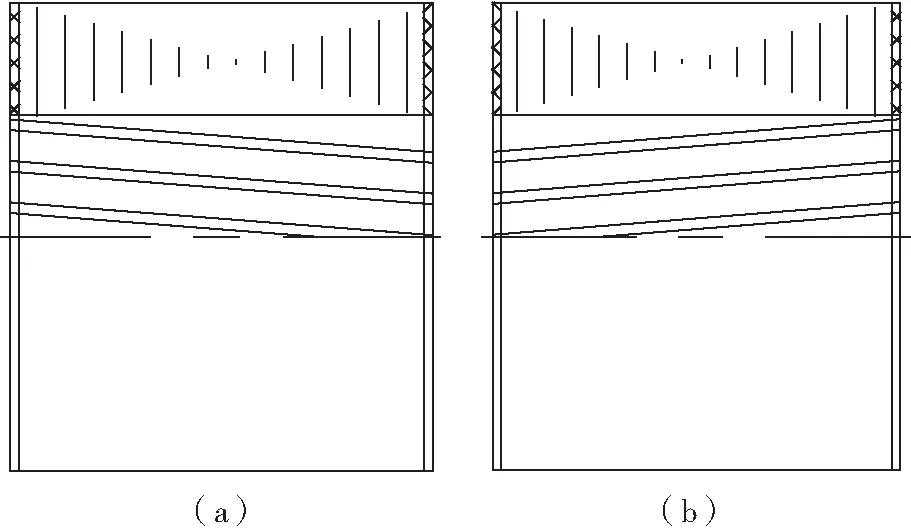
图7 定子铁心斜槽方式示意图
当铁心按照图7(a)中方式斜槽时,从电枢出线端看,所有槽往逆时针方向斜,因此绕组跟着往逆时针方向斜,从而导致绕组磁势位置往逆时针方向偏移。假设铁芯斜一槽,则出线端冲片与非出线端冲片正好错开一槽,如图8所示。电枢可以做这样一个等效,每块冲片与绕组单独形成电枢,之后再按照一定角度错开叠加得到整个电枢,设铁芯有n块冲片,出线端冲片为第1块,形成电枢为电枢1,依次往非出线端排序,则非出线端冲片为第n块,形成电枢为电枢n。假设电枢1中有某一磁势FA1,则电枢n中与该磁势有一对应磁势FA2,FA1与FA2方向恰好错开一个槽的角度,且大小相等,对这两个磁势求和,得到FA,则FA在FA1的基础上往逆时针方向斜了半个槽的角度;同样,第2块冲片、第(n-1)块冲片的对应磁势合成后会得到与FA大小相等、方向相同的磁势。所有磁势合成后方向仍与FA相同。因此,铁芯斜槽的电枢等效磁势方向较直槽时逆时针旋转了斜槽角度的一半,从而与该磁势对应的霍尔元件空间位置应逆时针旋转相同角度。
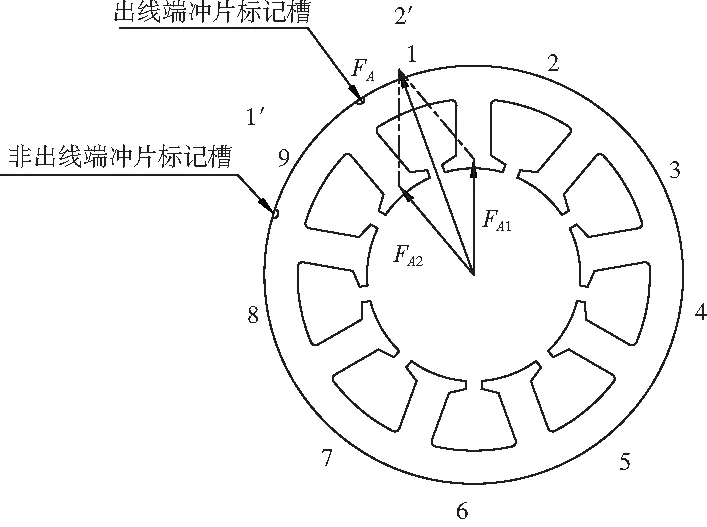
图8 定子铁心斜槽后磁势合成示意图
通过以上分析,可得出如下结论:若定子铁心按图7(a)方式斜槽,则霍尔元件空间位置较直槽时逆时针旋转斜槽角度的一半;若定子铁心按图7(b)方式斜槽,则霍尔元件空间位置较直槽时顺时针旋转斜槽角度的一半。
3 电机生产过程中影响霍尔元件实际位置的因素
在进行电机设计时,通过以上方法,能确定霍尔元件的理论位置。但是在电机实际生产过程中,还有一些因素会导致霍尔元件的实际位置偏离理论位置,从而影响电机性能,甚至导致电机不能正确完成换相,列举如下:
1)霍尔元件在印制板上的焊接位置偏离设计理论位置;
2)电机装配完成后,霍尔元件对应电枢绕组的位置偏离理论位置;
3)对于使用跟踪磁极反映主磁极极性的电机,跟踪磁极与主磁极极性不完全对应。
针对以上影响因素,在电机生产过程中,需注意下列事项:
1)霍尔元件焊接机械化或使用工装保证霍尔焊接位置与理论位置对应;
2)设计时确认电枢与机壳的相对位置,在生产中采取方法保证电枢压装完后与机壳的相对位置和 理论设计一致;
3)保证跟踪磁极与主磁极极性对应。
4 结论
通过上述分析,可得出如下结论:
1)霍尔元件可能理论位置由电枢磁势位置决定,霍尔元件实际理论位置由电机转向和真值表等要求决定;
2)霍尔元件的理论位置与电枢铁心是否斜槽有关;
3)电机生产过程中的人为因素会导致霍尔元件的实际位置偏离理论位置,可能使电机出现换相问题。
