大功率浅海拖曳式海洋可控源可调恒压双钳位发射技术
2022-01-07张文进刘丽华余刚刘小军方广有
张文进,刘丽华,余刚,刘小军,方广有
(1. 中国科学院空天信息创新研究院,北京,100000;2. 中国科学院大学,北京,100000;3. 山东蓝海可燃冰勘探开发研究院有限公司,山东威海,264200)
随着陆地资源日渐枯竭,海洋资源探测和开发越来越重要。海洋可控源电磁法是勘探海洋地质结构与研究油气资源分布的重要手段之一。该方法通过发射系统激励产生低频电磁场在海水、海底沉积物、地下高阻层中传播,利用海底接收机对电磁场进行观测并存储数据。由于电磁场在不同介质中的传播和衰减速度各不相同,通过对电磁观测数据进行处理,可以得到反映海底地质层的电阻率变化信息,从而获得海底地质结构和油气资源三维分布状况[1]。
20世纪70年代,CHAVE等[2−5]采用电偶极源在深海中发射电磁场进行可控源电磁探测实验,并通过电磁接收机获得了实验数据。进入21世纪后,海洋可控源电磁探测技术愈发成熟,按其发射方式主要分为深海拖曳式、浅海拖曳式和垂直发射式3种。由于垂直发射式探测技术工作效率低且对垂直角精度要求较高,目前主流的海洋可控源发射系统采用深海拖曳式和浅海拖曳式2 种[6]。深海拖曳式发射需要在海底拖曳发射舱,固定或拖曳式接收信号,国际机构在这一领域处于垄断地位。为解决深海拖曳式探测技术效率低的问题,相关机构设计了海面浅拖拽发射接收装置,该装置采用甲板发射方式,拖曳水平偶极子在水下100 m处,发射电流为1 500 A,发射偶极矩为800 m,主要用于浅海域勘探[7]。我国的海洋可控源技术研究与国外相比还存在较大差距。国内已有学者对深海拖曳发射技术展开研究并完成勘探测试验证[8],而有关浅海拖曳技术的研究较少。
海洋可控源电磁脉冲发射机是海洋电磁探测系统的核心装置之一,发射机需要产生重频稳定、脉冲边沿质量高的双极性电流脉冲,电流波形质量能够直接影响系统探测深度与测量精准度。一方面,保持电流脉冲上升沿与平顶段的线性稳定,可以减少对接收信号的噪声干扰;另一方面,电流脉冲下降沿关断时间短、线性度高,能够产生足够的高频谐波信号分量,有利于海底浅部信息探测[9]。与此同时,要保证电流脉冲下降沿在关断时不能产生反向过冲和振荡,否则会严重影响早期场的数据观测[10−14]。不同于其他应用环境下的电磁探测方法,海洋环境中海水的高导电率使电磁场趋肤效应更加明显,导致电磁场在海水中衰减幅度较大,通常采用增大发射电流的方式来提高探测深度,发射峰值电流须达到1 kA 或以上,同时要求电流脉冲在关断时快速发生线性变化,且关断时间灵活可调,电流脉冲重频范围能覆盖低频和较高频,从而满足不同深度的海底地质结构和海洋资源探测需求。
为满足上述电流脉冲发射要求,本文提出一种新型的可调恒压双钳位发射技术。区别于传统的恒压钳位方法,可调恒压双钳位方法不仅对电流下降沿进行恒压钳位,实现电流下降沿快速线性下降,同时对电流上升沿进行恒压钳位,实现电流上升沿快速线性提升。不仅如此,钳位电压还可以根据实际应用需求进行调节,实现电流关断时间灵活可调。因此,可调恒压双钳位技术通过对电流脉冲双边沿钳位控制,不仅可以提高边沿质量,而且有利于较高重频电磁脉冲的产生和精确控制,同时,灵活可调的关断时间有利于不同频率谐波分量的产生与高效发射,从而满足对海底不同深度探测目标的观测需求。
本文以浅海拖曳式海洋可控源电磁发射系统(MCSEM)关键技术为研究对象,首先,从发射系统整体设计角度,分析新型可调恒压双钳位发射电路的设计方法和时序控制逻辑;其次,分析可调恒压双钳位发射技术的工作原理、脉冲上升沿钳位技术、脉冲下降沿钳位技术以及可调阻尼介入技术的优化设计方法,并精确计算电流上升沿、下降沿钳位作用时间以及阻尼吸收电路介入时间;最后,在此基础上,进行发射电路建模仿真,并完成发射系统的实验测试。
1 MCSEM发射系统设计与分析
浅海拖曳式海洋可控源电磁探测系统示意图如图1所示,该系统采用甲板式发射机发射电流脉冲,水平拖曳发射偶极子天线激发低频电磁场信号,通过水平拖曳接收机接收海底目标电磁感应产生的二次场信号。发射接收天线装置处于水下10~100 m处,最大发射极距为600 m。相比于深海拖曳式可控源电磁探测系统,该系统拖曳速度较快,因此工作效率更高。

图1 浅海拖曳式海洋可控源探测系统示意图Fig.1 Diagram of MCSEM shallow towed detection system
发射系统整体结构如图2所示,主要包括数字逻辑控制器、驱动电路、全桥逆变电路、低压直流电源、上升沿高压钳位电路、下降沿高压钳位电路、可调介入时间阻尼吸收电路、发射负载。其中,数字逻辑控制器由FPGA 和STM32 共同组成,FPGA 负责生成短时延的PWM 控制信号送入驱动电路,STM32 负责监测各模块运行状态。驱动电路通过光电转换方式实现数字逻辑控制器和全桥逆变电路之间的光电隔离,其主要作用是将主控电路输出的控制信号转换为驱动能力更强的功率开关(IGBT)控制信号,并实现数字逻辑时序主控电路与IGBT之间的电气隔离。全桥逆变电路由4个IGBT组成,通过控制成对的IGBT导通或截止,产生双极性电流脉冲。发射负载为具有一定阻抗的电偶极子天线,可以等效为电阻和电感串联[15−16]。低压直流电源为发射电流平顶段提供能量。上升沿高压钳位电路由IGBT、高压钳位源和钳位电容组成,为电流脉冲上升沿提供高压钳位;下降沿钳位电路由高压钳位源和钳位电容组成,为电流脉冲下降沿提供高压钳位。阻尼吸收电路由2 个IGBT 和1 个阻尼电阻组成,在发射电流关断末期接到发射负载两端,用来吸收发射负载在全桥关断时残留的能量,消除关断电流尾部过冲和振荡。

图2 MCSEM发射机整体结构示意图Fig.2 Diagram of MCSEM transmitter structure
大功率海洋可控源发射机电路示意图如图3所示,各功率开关控制信号的时序逻辑如图4 所示。其中,U1为上升沿钳位电源电压,U2为低压直流电源电压,U3为下降沿钳位电源电压,Q1~Q7为功率开关编号,D1~D10为二极管编号,I为发射负载输出的发射电流,S1为Q1和Q4的逻辑控制信号,S2为Q2和Q3的逻辑控制信号,S3为Q5的逻辑控制信号,S4为Q6的逻辑控制信号,S5为Q7的逻辑控制信号。t1~t2为第1 阶段,IGBT 全桥逆变电路开始工作,S1信号脉冲使功率开关Q1和Q4导通,S3信号脉冲控制Q5导通。高压钳位电路接入全桥电路中,由于U1>U2,D8反向截止,发射负载受到U1上升沿高压钳位作用,快速线性上升。

图3 MCSEM发射机电路示意图Fig.3 Diagram of MCSEM transmitter circuit

图4 逻辑控制信号示意图Fig.4 Diagram of logical control signals
t2~t3为第2 阶段,S3信号脉冲控制Q5截止,Q1和Q4保持导通状态,此时,发射电流上升至平顶值,仅有低压直流电源接入全桥电路中,使发射电流在t2~t3时刻维持在平顶值。
t3~t4为第3 阶段,S1脉冲信号控制Q1和Q4截止,此时,发射电流开始下降,发射负载中等效电感存储的能量使电流经Q2,Q3和Q5旁路二极管流入下降沿高压钳位电路,发射电流由于U3下降沿高压钳位作用而快速呈线性减小。
t4~t5为第4 阶段,Q1,Q2,Q3和Q4截止,S5脉冲信号控制Q7导通。此时,阻尼吸收电路接到发射负载两端,发射负载中的剩余能量通过阻尼电阻释放。
t5~t6为第5 阶段,所有功率开关均处于截止状态,发射电流保持为0 A,等待负半周期的到来。
负半周期与正半周期时序逻辑相似,仅换为另外半桥工作,输出负极性电流脉冲。
2 MCSEM可调恒压双钳位技术
2.1 可调恒压双钳位原理
传统电磁脉冲发射机仅对下降沿进行钳位设计,且下降沿钳位电压固定,使关断时间不可调。根据信号频谱特性,关断时间多样性有利于对不同深度探测目标进行观测。较长的关断时间可以增大频谱低频功率密度,从而抑制小型地质体响应;较短的关断时间可以产生高频谐波分量,利于浅层探测。因此,发射电流关断时间可调,具有很大的应用潜力。
此外,MCSEM需要kA量级的电流脉冲幅度,传统电磁脉冲发射机由于没有上升沿钳位,电流脉冲上升沿一般呈指数缓慢上升,导致电流脉冲上升沿占空比较大,难以提高发射电流脉冲重复频率[17]。
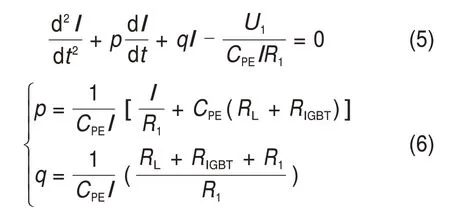
本文采用可调恒压双钳位技术,通过分时段接入不同电源的方式实现电流脉冲边沿恒压钳位并且持续时间可调,如图5所示。图5中,Imax为电流脉冲最大值,T1为电流脉冲上升沿持续时间,T2为电流脉冲平顶段持续时间,T3为电流脉冲下降沿持续时间,T1阶段通过控制Q5导通,使上升沿恒压可调钳位电路接入全桥电路,由于U2 图5 基于可调双钳位技术的发射电流和钳位电压Fig.5 Emission current and clamp voltage based on adjustable double clamp technique 式中:l为发射负载的等效电感。 从以上分析可知,电流脉冲上升沿和下降沿的变化速度可调,较大的钳位电压可以缩短电流脉冲边沿的持续时间,但同时对各功率器件的耐压要求也更高。 由于传统电磁脉冲发射机一般不对电流脉冲上升沿进行钳位,所以,电流脉冲上升沿提升过程仅与全桥电路参数相关,呈指数缓慢上升,满足如下公式: 式中:τL为与发射负载等效电感l和等效电阻RL有关的时间常数。对于发射机来说,τL=l/RL,限制了电流脉冲上升沿最短提升时间。 利用可调恒压双钳位技术可以有效缩短电流脉冲上升沿提升时间,通过导通Q5使发射机工作状态进入第1 阶段,对发射电流进行上升沿钳位,该阶段等效简化电路如图6所示。图6中,R1为上升沿钳位电源内阻;RIGBT为IGBT导通内阻;CPE为钳位电容。 图6 第1阶段电路简化示意图Fig.6 Simplified diagram of the first stage circuit 根据基尔霍夫定律,发射负载的发射电流I与两端的电压U满足 由式(4)可以推导出第1阶段发射电流与时间的关系: Q5的导通时间即上升沿钳位时间通过数字逻辑信号S3控制,过早或过晚使Q5截止都会引起发射电流波形发生畸变。需要求解式(5)来确定发射电流与时间的函数方程。将初始条件I(0)=0 A,I`(0)=U1/l代入式(5)可以求出: 需先确定发射电流平顶段峰值Imax才能求得上升沿钳位时间。对第2 阶段相应电路进行等效简化,如图7所示。图7中,D表示D8和D9的等效二极管;Ud为二极管导通压降;R2为低压电源内阻;Rd为二极管导通内阻。 图7 第2阶段电路简化示意图Fig.7 Simplified diagram of the second stage circuit 将式(8)代入式(7)即可求得上升沿钳位时间。 下降沿的关断时间是发射系统最为重要的指标之一。在实际应用中,线性斜坡关断电流是理想的关断电流类型。为了缩短电流脉冲关断时间,提高下降沿线性度[18],采用下降沿恒压钳位技术可以得到线性程度高、关断速度快的发射电流波形。 发射电流在平顶段保持稳定后,发射机进入电流脉冲关断第3阶段,对应的等效简化电路如图8 所示。图8 中,R3为钳位电源内阻,CNE为钳位电容。 图8 第3阶段电路简化示意图Fig.8 Simplified diagram of the third stage circuit 根据基尔霍夫定律,第3阶段发射负载中的发射电流I与发射负载两端的电压U满足 根据式(9)可以得出在电流脉冲下降沿时期,发射电流与时间的二阶微分方程: 式中: 发射系统阻尼吸收电路主要用于消除关断电流尾部过冲和振荡,提高发射电流波形质量。传统阻尼吸收电路根据介入时间可分为全时段阻尼介入电路和电流脉冲关断起始时刻阻尼介入电路,这种阻尼电路设计简单且能够有效抑制关断电流尾部过冲和振荡,但是阻尼电阻热损耗较大,在小电流发射系统中具有一定适用性,但对于kA量级发射电流峰值的海洋可控源发射系统,其热损耗会非常大。因此,本文提出一种新型介入时间可调的阻尼吸收电路,在发射电流关断末期使阻尼吸收电路介入,不仅可以有效抑制关断电流尾部过冲和振荡的产生,使发射电流平稳下降为0 A,而且能在很大程度上减少阻尼热损耗,在减小发射系统散热压力的同时提高能量利用率。 由于发射系IGBT内部存在寄生电容,与发射负载共同组成二阶响应系统,响应特性由阻尼系数ξ与频率ωp决定。二阶响应分为欠阻尼(0<ξ<1)、临界阻尼(ξ=1)、过阻尼状态(ξ>1)[19]。通常,海洋可控源长导线发射负载等效电感达到mH量级,等效电阻一般为mΩ量级,容易使发射系统处于欠阻尼状态,导致关断电流尾部产生严重的过冲和振荡现象。因此,选择适当的阻尼系数和阻尼介入时刻不仅可以缩短关断时间,还可以防止关断电流产生尾部过冲和振荡现象。 为同时解决上述问题,采用分段式电流关断,须选取适当的阻尼吸收电路介入时刻,即在电流脉冲下降沿关断前中期进行恒压钳位,有效缩短关断时延,提高电流关断线性度;在电流脉冲下降沿关断末期接入阻尼吸收电路,使发射电流平稳下降为0 A。此时,阻尼吸收电路中的阻尼电阻与下降沿恒压钳位电路同时接入全桥电路,其等效简化电路如图9所示。 图9 下降沿恒压钳位末期等效电路Fig.9 Equivalent circuit of end of falling edge 由图9分析得到I=Ic+IR(其中,Ic为流经电容器的电流,IR为流经电阻器的电流),当Ic≠0 A时,恒压钳位电路仍然处于工作状态,当Ic=0 A时,恒压钳位电路停止工作,此时满足I=IR,并且U=U3,即阻尼电路介入时发射电流Idamp满足: 将式(13)代入式(12),可以得到阻尼介入最佳时刻。 为验证本文提出的可调恒压双钳位技术的可靠性和可行性,使用MATLAB 中的Simulink 对发射系统进行仿真。海洋可控源发射系统负载设计长度为600 m的电偶极长导线,对应的等效电阻包括导线电阻和电极与海水的接触电阻,其估算值为56 mΩ,对应的等效电感计算值为1.0 mH。发射电流脉冲重复频率为25 Hz,脉冲占空比为50%,具体的仿真元器件参数如表1所示。 表1 电路仿真参数Table 1 Circuit simulation parameters 图10所示为不同条件下的发射电流仿真结果。由图10(a)和10(b)可见,钳位电压和钳位时间共同决定电流脉冲上升沿线性提升效果。需要注意的是,须求解式(7)获得合适的钳位电压和钳位时间后,才能保证发射电流波形无畸变,并使发射电流在平顶段趋于稳定。由图10(c)和10(d)可见,在发射峰值电流保持一定的条件下,钳位电压与钳位时间呈反比,适当增大钳位电压可以缩短电流脉冲边沿持续时间,在实际应用过程中要注意钳位电压一定不要超过各元器件的耐压值上限。 图10 不同控制条件下发射电流仿真结果Fig.10 Current simulation results under different control conditions 阻尼吸收电路的介入时刻需要合理选取,过早介入会增大发射系统热损耗,过晚介入会使关断电流尾部产生过冲和振荡现象,需求解式(12)取得最佳阻尼介入时间。当发射电流峰值为2 000 A时,阻尼介入时间分别为0,1.56 ms 和1.85 ms 时的发射电流仿真结果如图11 所示。由图11 可见,当阻尼电阻介入时间为全桥IGBT开始关断时刻延迟0 ms 时,电流脉冲下降沿全程接入阻尼电阻,虽然关断电流尾部无过冲振荡,但热损耗很大;当阻尼介入时间为开始关断时刻延迟1.85 ms 时,阻尼介入时间过晚,关断电流尾部产生较大的电流振荡;当阻尼介入时间为开始关断时刻延迟1.56 ms 时,电流波形与0 ms 时刻阻尼电阻介入的波形完全一致,表明阻尼介入时间适当,不仅可以有效抑制电流关断尾部的过冲振荡现象,不会对关断时间和关断波形质量造成影响,并且在极大程度上减少了阻尼热损耗。因此,通过可调阻尼介入技术,可以适当调整阻尼介入时间,一方面可以有效减小发射系统热损耗,另一方面也能有效消除关断电流尾部过冲和振荡。 图11 不同阻尼介入时间的发射电流仿真Fig.11 Simulation of damping resistant access to circuit at different time 大功率浅海拖曳式海洋可控源发射系统如图12 所示,图12(a)所示为MCSEM 发射机,用来产生双极性电流脉冲;图12(b)所示为等效发射负载,用于模拟发射偶极子天线的等效阻抗和等效感抗,以便于在室内测试环境中模拟实际海洋环境下的发射条件。实验场地为中国科学院空天信息研究院电磁辐射与微波实验室,U2采用0~120 V 可调直流电压,U1和U3采用0~1 200 V 可调电压。实际测得RL为56.28 mΩ,l为1 mH,CPE和CNE为2.58 mF。通过27 组横向对比实验和纵向对比实验,得到可调恒压双钳位技术对发射电流波形的影响。测试期间更换电流探头重复测试,测得I相对误差均在1%内。由于环境中噪声干扰相较于I要低得多,并且测量各处电压时采用差分探头测量,所测得的信号均有较高的信噪比。 图12 MCSEM 发射系统Fig.12 MCSEM emission system 在横向对比实验中,为保证相同的发射电流峰值,U2固定为48 V,在同一发射负载条件下,发射电流峰值维持在600 A。改变U1和U3,可得实测电流脉冲上升沿与下降沿持续时间变化如图13所示。由图13 可见,当U1和U3同时为530,620,750 和950 V 时,对应的电流脉冲上升沿和下降沿持续时间分别为1.2,1.0,0.8和0.6 ms。实验结果表明,当U2一定时,发射电流峰值不会随着U1和U3发生变化。电流脉冲边沿持续时间受到U1和U3影响,钳位电压越大,边沿持续时间越小,但对功率器件的耐压值有了更高要求。 图13 不同钳位电压下的实测电流脉冲Fig.13 Measured emission current waveform at different clamping voltages 在纵向对比实验中,通过等梯度改变U2的方式逐步提高Imax,实验中U2从9 V 递增至90 V,Imax从96 A递增至1 120 A。目前,受限于实验室供电系统输出功率,实际完成的发射系统峰值电流为1 120 A,实测电流波形如图14 所示。发射系统测试参数设置如下:钳位电压为1 100 V,上升沿钳位时间为1.2 ms,阻尼介入时间为关断开始时刻延迟1.1 ms。从图14 可知:通过可调恒压双钳位技术,可以使发射电流脉冲在上升沿期间迅速提升至平顶值附近,然后在下降沿期间使发射电流保持快速线性下降。需说明的是,由于商用的低压电源模块频率响应速度较慢,导致电流脉冲上升沿结束并与平顶段低压电源切换时,低压电源电压向下波动,使发射电流在平顶段出现轻微扰动,后续将通过增加电容组辅助低压电源放电的方式改善低压电源输出频率响应特性。 图14 实测1 120 A发射电流波形Fig.14 Measured current waveform of 1 120 A 发射电流关断波形如图15 所示。从图15 可知:发射电流关断过程线性度高,关断时间短,并且在选择合适阻尼电阻和阻尼介入时间条件下,电流脉冲尾部无过冲和振荡。 图15 实测关断期间发射电流波形Fig.15 Measured current waveform of turn-off time 1)提出了一种可调恒压双钳位技术,通过控制上升沿与下降沿钳位电压,间接改变电流脉冲边沿持续时间。上升沿恒压钳位使发射电流迅速提升,有利于增大发射电流峰值,提高发射脉冲重复频率;下降沿恒压钳位和介入时间可调阻尼吸收,可以使发射电流快速线性关断,同时满足关断时间可调、关断电流尾部无过冲的发射要求。2)可调恒压双钳位技术能够改善发射电流边沿特性,实现对电流脉冲边沿持续时间的精确控制,最终实现大幅度、高重频、快关断、无过冲的大功率电流脉冲信号发射。

2.2 脉冲上升沿钳位技术






2.3 脉冲下降沿钳位技术





2.4 可调介入时间阻尼吸收电路


3 发射系统电路仿真与分析



4 实测结果




5 结论
