基于纯角度的快速收敛无人机环航控制算法
2022-01-06桂欣颖辛沙欧宋震林戚国庆
桂欣颖,辛沙欧,宋震林,戚国庆
(南京理工大学自动化学院,江苏南京 210094)
无人机一向以体积小巧、飞行灵活而受到欢迎,在民用和军用领域都有广泛应用。在军用领域中,为了能顺利完成目标追踪,对无人机的隐蔽性有一定的要求,因此仅用角度信息进行目标定位的被动跟踪方案成为近年来的研究热点[1]。而无人机环绕目标飞行的跟踪方式是一种能有效提高纯角度目标定位可观测性的跟踪方式[2-3]。
文献[4]讨论了基于距离量测对一组运动目标进行环航跟踪的问题。文献[5]研究了自身位置信息未知的情况下对目标的跟踪问题,实验结果表明,机器人不需要测距传感器,可以仅靠测角信息围绕目标进行圆周运动。文献[6]在跟踪系统中同时使用角度信息和距离信息对非线性目标位置和速度进行估计。文献[7]提出一种基于自身速度和角度信息估计目标运动速度的分布式算法,并在此基础上设计了一种分布式导航算法,控制多个观测器以一定的距离围绕目标运动。也有学者使用多观测器进行纯角度定位与跟踪的方法,但是由于对传感器精确度和时间同步的要求导致多传感器观测方法相对复杂并且价格昂贵[8-9]。仅使用角度测量的纯方位目标定位方法虽然能解决这一问题,但定位精度依旧需要进一步改进[10-11]。在纯角度量测的情况下,目标位置的估计结果很大程度上取决于观测平台的运动轨迹[12]。文献[13]和文献[14]针对观测平台的运动轨迹对跟踪精度的影响进行了研究,结果显示在纯角度目标跟踪系统中使用环航飞行可以有效提高跟踪精度。有学者[3,15]提出一种对较慢速运动目标进行纯角度观测下环航跟踪的算法,但是该算法的收敛速度有待提高。
在现有的研究成果中,已有多种基于纯角度的环航跟踪策略,但是关于控制器的收敛速度的结论较少。而无人机是否能够快速收敛至期望轨迹,在实际应用中非常重要,不仅会影响无人机对目标的状态估计,在一些特殊情况下还可能因为没有及时接近目标而导致目标丢失。因此该文根据无人机与目标间的相对运动模型提出一种控制方案,并给出可行的控制参数,通过与已有的控制策略进行对比实验,验证文中所述控制器的优越性。
1 纯角度观测下的目标状态估计算法
该文主要考虑无人机对地面上运动的目标进行定位与跟踪的问题。假定目标只在X-Y平面上运动,无人机也保持恒定高度飞行,且无人机的飞行速率始终大于目标运动的速率。无人机与目标的相对位置如图1 所示。

图1 无人机环航跟踪示意图
Po为无人机的位置,PT为目标位置,为目标估计位置,vo表示无人机的飞行速率,β(t)为角度量测,η(t)表示无人机与目标的测向矢量,表示η(t)逆时针旋转90°的向量,D(t)表示无人机与目标间的实际距离。

根据文献[1]提出的基于虚拟机交叉定位算法的目标估计策略,如图2 所示。
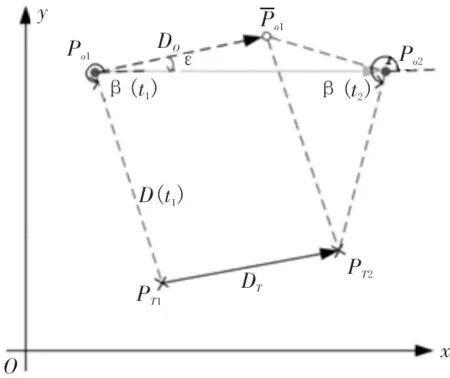
图2 虚拟机交叉定位原理图
Po1、Po2、PT1、PT2是t1和t2(t2>t1)时刻无人机与目标的位置。根据目标的运动速度,得出在Δt采样时间内目标的运动距离为,将无人机以相同的方向移动同等距离,该点即为无人机在t2时刻的虚拟位置。

其中,Zβ(t)=β(t)+ϑ(t)表示含有高斯白噪声的量测信息。
2 无人机环绕控制策略
2.1 无人机环绕控制算法
在对运动目标进行纯角度目标定位时,无人机以目标为圆心,以给定的距离为半径进行环绕式飞行,这是一种对目标进行角度观测的有效策略。在实际应用中,通常希望无人机能够快速收敛到期望轨迹,以应对复杂的环境变化。该文针对这个问题提出一种能快速收敛的、具有更好抗干扰性的无人机环绕控制策略。
无人机与目标的相对运动模型如图3 所示,无人机的运动模型为:

图3 无人机与目标的相对运动模型图

vo为无人机的运动速率,Po=[xo yo]T∈R2指无人机的位置,PT=[xt yt]T∈R2指目标的位置,vo=[vocosψo vosinψo]T∈R2表示无人机的速度,ψo为无人机的航向,ωo为无人机的控制输入角速度。
而目标的运动模型为:
vt为目标的运动速率,PT=[xt yt]T∈R2指目标位置,vt=[vtcosψt vtsinψt]T∈R2表示目标的速度,ψt为目标的航向,ωt为目标的角速度。
设无人机与目标间的相对速度为vr,那么vr=vo-vt,根据式(3)和式(4)可得相对运动模型为:

其中,[xr yr]T∈R2为无人机相对于目标的位置。
在这个运动模型下给出无人机对目标进行环绕式飞行的控制策略,如下:

其中,ed=d-Dd表示实际环航距离与期望环航半径的差,Dd表示期望的环航半径。β为无人机与目标间的方向角,φ为相对速度与视线之间的夹角,Φ(ed)为控制器参数,在文中设计为:

取k1,k2∈R+,K∈(]0,1,α=p/q(其中0 <p<q,且均为奇数)。sat()为饱和函数,定义为:

式(6)表示的控制策略中,无人机能够以目标位置为圆心,以给定距离为半径做环绕式跟踪飞行,并且能够快速收敛。
2.2 算法有效性证明
无人机在进行环航跟踪时,速率应始终大于目标运动速率,此节将在这一前提条件下对式(6)控制策略的稳定性进行证明。
定义无人机与目标的相对运动模型如下:

由式(5)和式(9)可得:

如 图3 所 示,vr可由向量η(t) 和((t) 表示为。可求解出式(10)中的相对速度,如式(11)所示:

根据假设,无人机的最大运动速率应该大于目标的运动速率,因此相对速率vr∈R+。因此对于给定的恒定无人机输入速率vo,可由式(8)得到唯一的一个相对速率vr。又由vr=vo-vt和式(11)可以得到无人机速度控制器的结构,应该为:

只需要调节角度变量φ,即可输入给定的无人机速度控制量。
由于无人机飞行控制器的最终目的是使实际环航半径收敛于期望环航半径,即,由ed的定义,显然ed∈(-Dd,∞),并且=-vrcosφ。为了达到这个目标,令φ的函数,如下所示:

于是由式(12)和式(13)可得无人机飞行控制策略,即式(6)。由无人机的控制参数(式(8)),和sat()函数的定义可知,当ed>0 时,Φ(ed) >0;当ed<0时,Φ(ed)<0;当ed=0时,Φ(ed)=0。
为了证明系统的输出稳定性,选取Lyapunov 函数,如式(14)所示:

显然,式(14)是正定的,其导数如式(15)所示,对于文中设计的如式(8)所示的控制参数,总是负半定的。

根据拉萨尔不变集原理[16],ed收敛至0,即实际环航半径收敛于期望环航半径。
3 仿真结果与分析
设定目标的初始位置Pt(0)=(2,3)Tm,目标的运动轨迹为Pt(t)=(2+t,3+10 sin(0.1t)+t)Tm,无人机的初始位置Po(0)=(9,8)Tm,设定无人机飞行速率为20 m/s,期望环航半径Dd=10 m。设定控制器参数K=1,k1=0.1,k2=0.01,α=7/11。图4 为目标环航跟踪的轨迹图,图5 为实际环航半径,图6 为目标在x方向和y方向上的位置估计误差。通过下图可以看出,文中所述环航跟踪方案能够在较小的误差下完成对目标的位置估计并进行环航跟踪,且跟踪效果良好。

图4 目标环航跟踪轨迹图

图5 实际环航半径
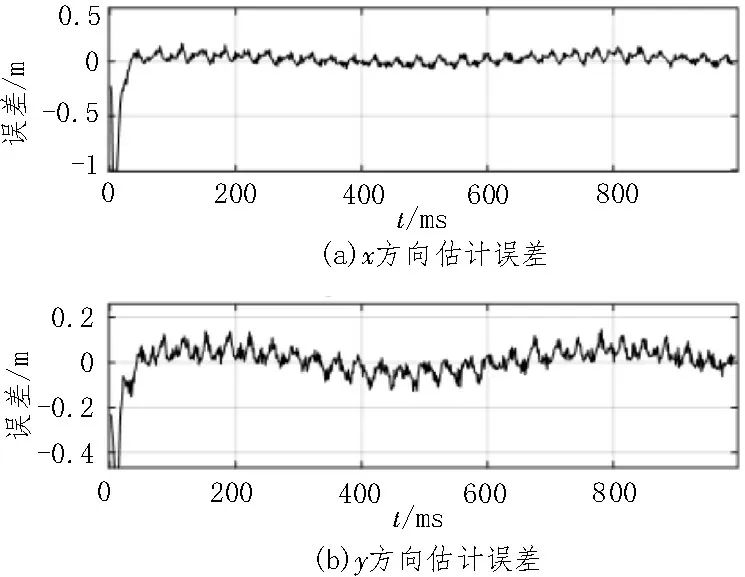
图6 位置估计误差
通过与文献[2]中的纯角度环航控制方法作比较来说明文中采用控制器的优越性,将文中提出的环航跟踪策略记为M1,将文献[2]中提出的环航跟踪策略记为M2。两个系统的目标初始位置和轨迹都与上文一致,无人机的初始位置Po(0)=(-20,-20)Tm,设定无人机飞行速率为20 m/s,期望环航半径Dd=10 m。设定控制器参数K=1,k1=0.3,k2=0.03,α=7/11,对M1 和M2 进行控制策略的仿真实验,无人机跟踪轨迹如图7 所示,图7(a)和图7(b)分别为t=2 s,t=4 s 时的跟踪轨迹。从图7 中可以看出M1在跟踪开始2 s 内就迅速接近目标,实际环航半径快速收敛至期望半径;而M2 在4 s 后才收敛至期望半径。环航半径误差如图8 所示,从图中可以看出,M1的环航半径误差和M2 相比有明显的减小。

图7 目标环航跟踪
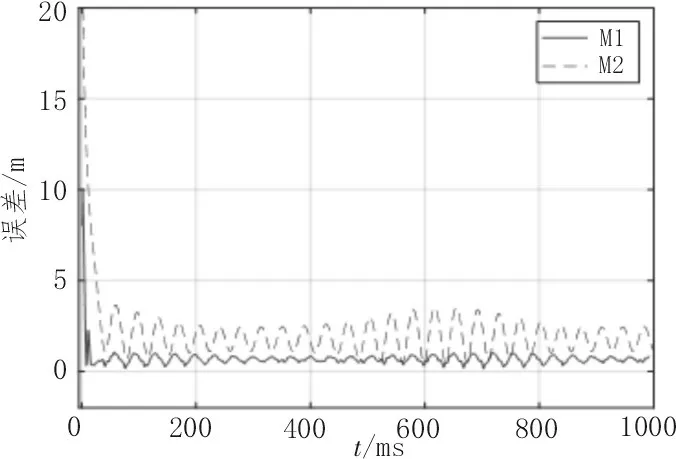
图8 环航半径误差
上述实验表明,文中提出的控制器能够以较小的误差对目标进行环航跟踪,收敛速度和控制精度相较于文献[2]所述控制器有明显提高。
4 结论
该文针对单无人机对单个目标进行纯角度环航跟踪问题进行了相关研究,根据无人机的运动特性设计了一种控制器,以保证无人机能快速稳定地跟踪运动中的目标;根据李雅普诺夫定理给出了控制器的参数,使得无人机的环航半径能够较快地收敛至期望半径;并通过仿真实验与已有控制策略进行对比分析,验证了文中所述控制策略的精确性和快速性都有所提升。上述研究为快速收敛的无人机环航跟踪提供了一定的技术基础,进一步的研究可以将应用范围扩展至多无人机环航跟踪领域。