某型对陆攻击红外成像制导武器抗烟幕干扰试验研究*
2022-01-06邓传加
邓传加 鲍 珊
(1.91550部队93分队 大连 116023)(2.91550部队91分队 大连 116023)
1 引言
某型红外成像末制导武器,装载于某型潜艇或大型驱逐舰等,主要用于攻击周边地区作战对象港内/近岸和陆地纵深高价值的政治目标、固定点目标、面目标、关键军事目标和经济目标等等。攻击的固定点目标主要包括楼房、桥梁、机场塔台、指挥中心、地面机库、简易机棚、油罐车、船坞、飞机洞库出入口等地面建筑物;攻击的固定面目标主要包括机场跑道、飞机洞库引道、导弹阵地等;攻击的时敏目标主要包括导弹发射控制车、雷达探测车、指挥车等各类车辆和港内停泊、驻泊的各类水面舰船和保障船等。该型红外成像末制导武器命具有较高命中率高、干扰能力强的优势,在未来战争中将发挥重要作用。靶场试验中,针对实战化考核的需要,设计实施红外烟幕干扰,考核对陆攻击红外成像制导系统抗红外烟幕的性能[1]。
2 某型对陆攻击红外成像制导系统组成及工作原理
2.1 红外成像制导系统组成
根据对陆攻击巡航作战模式及使用流程,红外成像制导系统按照功能由红外成像分系统、随动分系统和信息处理分系统三个部分组成。其功能特性是将目标和背景的辐射能量通过光学系统汇聚到探测器上,完成能量的光电转换,生成数字图像信号。该系统的组成及功能如图1[2]。
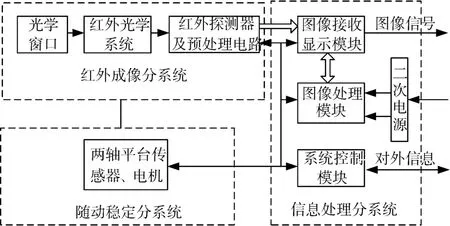
图1 红外成像制导系统功能组成框图
2.2 红外成像制导系统工作过程
导弹末制导阶段,红外成像制导系统采用自动目标识别的方式工作。根据预先装订的目标模板图或目标知识信息,结合导弹飞行参数信息(包括距离、高度、姿态等),在飞行末段实时处理导引头输出的序列图像并检测识别目标。
当导弹到达航迹规划的自动目标识别点时,启动目标识别流程,通过获取此时目标实时图及拍图时刻的相关信息数据(包括弹体姿态,成像器光轴姿态、弹体位置等),对实时图进行预处理(主要包括平滑去噪,图像增强、特征提取),然后与事先装订在弹上的相应目标模板图或目标知识信息进行特征相关匹配,从图像中选出候选目标,最后将特征最相似的候选目标位置作为识别结果输出,完成一次目标识别处理。为保证可靠性,可采用多帧识别策略,最后综合多次识别结果,给出目标在实时图中的位置。红外成像制导系统根据识别结果转入跟踪,在跟踪过程中,采用识别跟踪一体化策略,融合识别及跟踪信息,对跟踪点进行多次修正以保证最终命中精度[3]。
2.3 自动目标识别算法
依据保障条件、目标的红外特性及形状特性、背景的复杂程度、目标的成像大小和攻击策略的不同,对陆攻击红外成像制导系统可以分别采用基于模板匹配的目标识别算法和基于指示的目标识别算法,充分发挥两类方法各自特点满足不同的识别任务需求。
2.3.1 基于模板匹配的识别算法
基于模板匹配的识别算法就是采用目标区域的结构图或纹理图制作目标基准图,与红外前视成像装置输出的实时图像进行匹配识别,从而确定目标在实时图像中的位置。基于模板匹配的自动目标识别算法的优点是目标类型适应性强,适合所有与周围背景相比有一定独特模式特征的目标。
基于模板匹配识别算法详细流程如下:
1)根据待识别目标瞄准点信息(经纬度坐标、海拔高等数据)和任务规划与远程管控系统规划出的若干前视目标识别工作点数据(经纬度、海拔高度、惯导和高度散布等),利用测绘基准数据在每个识别工作点制作出若干目标模板;
2)当导弹飞行导某一目标识别工作点时,目标识别算法根据实时图像拍摄时刻的惯导数据、海拔高度数据、成像器光轴俯仰和航向数据,计算出实时图像旋转角,然后对实时图像进行旋转校正;
3)根据实时拍图时刻的位置、高度或视线角信息,在弹上存储的一系列模板中选择若干模板;
4)对实时图像进行特征提取处理(包括边缘等信息提取);
5)利用特征提取后的实时图像与选中的若干模板逐一匹配处理,选出最为接近的,作为本次目标识别的结果。
若惯导位置散布和高度误差较小或目标本身特征明显,则可以选择装订一系列的小模板在大实时图上进行匹配,得到目标位置;若目标本身特性较弱,需依赖周围场景的特征进行识别或惯导位置散布和高度误差较大时,则可以选择装订大模板,采用小实时图在大模板上进行匹配,最终得到目标位置[4]。
2.3.2 基于指示的识别算法
基于指示的识别算法是利用目标的统计和结构,目标和背景信息的显著差异,获得与目标位置有关的约束条件,进行自适应识别处理。这种算法通过将装订目标的特征信息和在实时图中提取的特征进行比较,给出目标在实时图中的位置。该算法不需要制作和装订大数据量的模板,同时避免了模板制作时引入的视线角及距离偏差带来的识别偏差,但对目标特征信息丰富程度要求相对较高。基于区域关联知识识别算法详细流程如下:根据待识别目标瞄准点信息(经纬度坐标、海拔高等数据)装订特征信息;
1)当导弹飞行到某一目标识别工作点时,目标识别算法根据实时图像拍摄时刻的惯导数据、海拔高度数据、成像器光轴俯仰和航向数据,计算出实时图像旋转角,然后对实时图像进行旋转校正;
2)根据实时图像拍图时刻的导航信息,在弹上生产建筑物在图像中的边缘模板图;
3)对预处理后的图像进行分割、边缘提取、检测等目标特性提取处理,为目标特征的检测识别提供数据;
4)利用特征提取后的实时图像与生成的目标特性进行相似性度量,确定出特征最符合的目标作为结果输出。
综上所述,自动目标识别算法依据不同的打击目标、保障条件以及攻击弹道,采用基于模板匹配和基于区域关联指示两类识别算法择优选用或综合应用的方式,可拓宽打击目标的范围,降低武器系统弹的保障要求,提高武器系统的作战能力和适应程度。
3 烟幕干扰红外成像制导的工作原理
烟幕是烟和雾的通称,属于气溶胶体系,是光学不均匀介质。由于受波长及烟雾特性的影响,当光辐射通过烟雾时,光会产生折射、反射、衍射及被烟雾吸收等情况,通过的光辐射会大大减弱[5]。
烟雾对红外成像武器干扰主要包括两个方面,一是通过强的红外辐射,对被攻击目标进行干扰,进而达到保护的目的,二是利用烟幕颗粒的物理特性,进行吸收和散射,大大降低其分辨识别能力,从而影响跟踪系统的特征提取和选择过程,使红外成像制导系统跟踪阶段无法正常工作。烟幕干扰对红外成像制导的遮蔽原理如图2所示[6]。
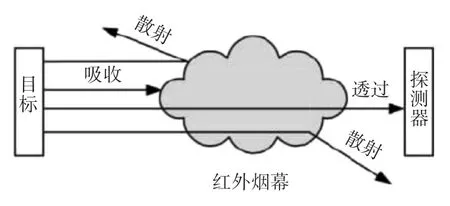
图2 烟幕干扰遮蔽原理图
由上图可见,红外烟雾对红外制导武器的红外及可见光的遮蔽效果比较明显,大部分被吸收和散射,效果明显且价格低廉,因此在国内外战场上广泛应用烟雾对抗光电及红外制导武器等装备。同时烟幕器材成本相对较低,因此烟幕是一种高效费比的干扰手段。基于红外成像制导系统的工作原理和烟幕干扰的工作原理分析,目前复杂对抗环境下,靶场试验采用红外烟幕干扰考核红外成像制导系统抗红外干扰性能[7]。
4 烟幕对红外成像制导系统干扰分析
4.1 相关跟踪算法
某型红外成像末制导武器,跟踪阶段主要采取相关跟踪的方法。相关跟踪主要通过比对法进行计算,通过实时测量的目标图像和预先保存在数据库的图像进行比对计算,通过相关度的取值,生成误差信号,采用闭环原理对目标的比对从而进行跟踪[8]。
假设测量目标图像的亮度值用R(x,y)表示,在预先保存在数据库的同一图像的亮度值为S(x,y),R和S分别为对应的视场范围,通常情况下视场R要大于视场S,图像示意图如图3所示。
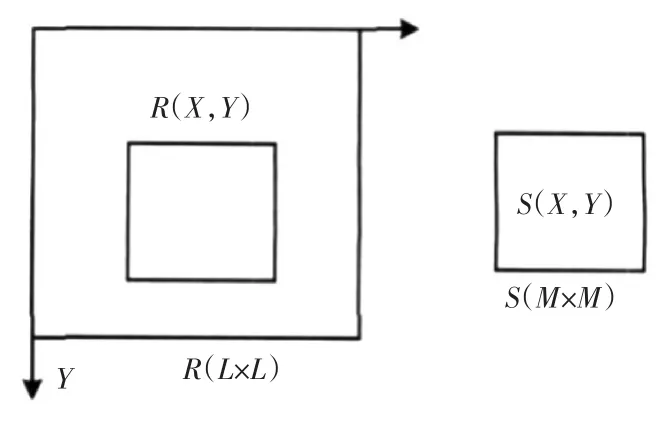
图3 预存图像与实时图像比对示意图
可用相关函数C(x,y)来描述它们之间的相关程度,即:

式中,s(u,v)和r(u,v)表示两幅图像的矩阵,(x,y)则表示它们的位移量。
图像相关法对目标图像的跟踪描述如下[1]:在同一时刻对目标图像为进行连续测量,第N帧图像为rN(x,y),第N+1帧图像rN+1(x,y)的目标图像具体位置和上一张及下一张的位置一定有所变化,求出两者之间的相关值,就可以求出跟踪目标的位移值,以此作为误差信号控制伺服机构进行跟踪测量。
4.2 红外烟幕对相关跟踪测量的影响
由于实时目标图像和数据库图像不是在同一时间或环境中提取的,会有一定的偏差,所以相关矩阵的主峰值可能会出现相应不是配准点的情况[1]。烟雾造成图像亮度不均匀变化,使实时图像的亮度函数就可能为为r'=(u,v),这样与预存图像亮度函数s(u,v)之间的相互关系为

配准点位置坐标为x'、y',与无烟幕时的配准点位置x、y相比,有:
图像的照度由于受烟雾的扰动,使照度随机变化,造成配准点随机变化,使系统的跟踪误差加大。
5 红外成像制导系统抗烟幕干扰试验研究
5.1 抗烟幕干扰带飞试验
靶场带飞试验用来验证红外成像制导系统在飞行载体上的探测性能和抗干扰性能。研究红外成像制导系统抗干扰性能试验中,将红外成像制导系统放置在吊舱内,并将吊舱挂载于飞机下方,或者将红外成像制导系统直接通过支架挂于飞机机库下;通过与指定合作目标进行跟踪测量,模拟弹上红外成像制导系统的动态跟踪状态,并且在此过程中对系统进行干扰,检测动态环境下干扰效应情况。挂飞试验所需的配电设备、测控设备、数据记录设备和通信设备等都安置在飞行载体上。
5.2 抗烟幕干扰试验条件选择
靶场带飞试验首先选定合适的飞行航路,对目标进行过程逼近飞行,达到动态验证红外成像制导系统平台特性、成像效果、跟踪稳定及工作流程合理性。其次,还需对红外成像制导系统性能以及目标识别能力进行考核,在上午、中午、下午、顺光、逆光等不同试验工况下,对各种典型目标配合制导控制系统进行机载带飞试验。典型目标主要包括楼房、地下掩体、机场跑道、导弹发射车等目标。根据典型目标及特征要求,试验地点选择在具有典型地形地貌特征和典型目标特征的渤海沿岸的船坞码头、小型城镇、雷达哨所、机场和测量站点等,使其红外辐射特性相对而言具有一定的真实性。
5.3 红外成像制导系统抗烟幕试验方法
5.3.1 抗烟幕干扰试验方法设计
靶场抗红外烟幕干扰带飞试验主要验证红外成像制导系统在不同时间、不同攻击方向与自然环境下,抗干扰流程及性能。试验设计时,考虑武器系统的飞行性能和红外成像制导系统的作用距离,干扰发射装置视情布设在陆上指定位置,试验目标构设位于M点。红外成像制导系统抗红外烟幕干扰试验航路仰视图如图4所示。
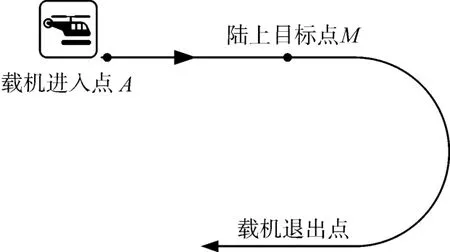
图4 抗红外干扰试验航路仰视图
以烟幕干扰红外成像导引头识别典型固定点目标为例,选取陆上符合典型目标特性的实体靶楼或是机房、仓库作为典型固定点目标(M点),载机沿指定航路AM进入,AM距离约15km,载机从A点进入时飞行高度约150m,飞行至距目标12km左右B点处,逐渐下降至50m高度。载机飞行距目标10km左右C点处,红外成像系统开机搜索,当能够识别目标后,红外成像系统关机。陆上干扰发射站位听令分2波次(每波次2枚)施放红外烟幕干扰弹,红外成像系统听令开机搜索目标,验证烟幕干扰条件下对目标的识别性能;若红外成像系统未被干扰,当红外成像系统稳定跟踪目标,载机距目标5km左右D点处,陆上干扰发射站位听令分2波次(每波次2枚)施放红外烟幕干扰弹,验证烟幕干扰条件下红外成像系统对目标的跟踪性能。载机保持该高度平飞过目标M后沿E点退出航路。载机进入方向与目标夹角分别为45°、90°、135°,共进行3个有效航次试验。该项试验航路图如图5所示。
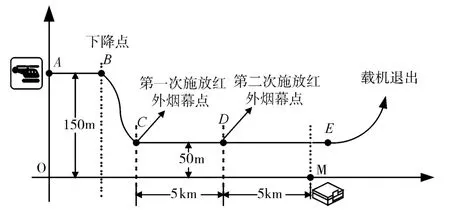
图5 烟幕干扰红外成像系统识别典型固定点目标航路图
5.3.2 抗烟幕干扰试验结果评定方法
在红外制导系统进入方向,烟幕干扰形成后,能够遮盖全部或大部分陆上目标,判定烟幕干扰态势设置有效。在烟幕干扰态势设置有效的前提下,若红外成像制导系统被干扰,经对抗最终仍能稳定跟踪陆上指定目标,则判定红外成像制导系统抗烟幕干扰成功。
6 结语
目前复杂电磁环境下对抗红外成像制导系统最实用、最有效的干扰样式设计采用红外烟幕干扰。基于红外成像制导系统的工作原理和烟幕干扰的工作原理分析,探讨了烟幕对红外成像制导系统的干扰。着眼靶场试验实战化需求,探讨了红外成像制导系统抗烟幕干扰试验方法及初步结果评定方法,为某型对陆攻击红外成像制导武器设计定型抗干扰性能试验提供可靠的技术支撑。
