一种基于单片机的智能盲杖系统
2022-01-06郑安豫
郑安豫, 王 俊,2, 周 锐
(1.安徽电气工程职业技术学院, 安徽 合肥 230051;2.国网安徽省电力有限公司培训中心, 安徽 合肥 230022)
0 引言
伴随社会的发展,作为一个特殊的群体,残疾人生活质量的关注度逐步提高。除了在生活工作中给予平等对待、不歧视之外,残疾人生活所需的各种辅助设备也在不断的朝着智能化方向发展。
根据中国残疾人联合会的《全国残疾人人口基础库主要数据》,截至2018年12月31日,我国视力残疾人数量约为410.8万。与盲人数量不对称的是,中国的导盲犬的数量惊人的少。盲杖作为盲人的生活辅助用品,作用就尤其重要。随着社会的发展和盲人对盲杖应用的实践,促进盲杖的结构和使用方法有了长足的改进。由起初简单的棍棒,升级为更具应用效能的各种盲杖等;盲杖材质也更加轻便,外观也更加醒目,从而全面提升盲杖使用体验感和满意度。
近年,对盲杖的改进主要在盲杖的材质,形态,使用的舒适度等方面进行升级。随着“互联网+”时代的来临、移动互联网的迅猛发展,各种生活用品、家居用品、社会基础设施的智能化发展如火如荼。盲杖的智能化也顺利成章。
文章提出了一种基于单片机的智能盲杖设计。保留了传统盲杖轻便、舒适的特点之外,还增加了智能化模块,使盲杖能够提供更多智能化的功能。
1 设计思路
1.1 导航
进入移动互联网时代之后,智能手机应用也走进普罗大众的方方面面。地图APP作为一种常见的智能手机应用,具有定位、导航等功能,目的地的输入也支持语音输入,对盲人的使用没有太大的障碍。由于身体限制,盲人对路径导航的需求较常人更为迫切。但由于手机语音播报声音较小,在喧嚣的街道环境中需要贴近耳朵才能听清,如果使用耳机听取导航播报,虽然能够听清楚导航播报语音,但是带上耳机会影响盲人对周围环境的判断。综合来看,弊大于利,使用耳机并不是最佳方案。
为解决上述问题,文章设计了蓝牙模块连接手机,并设置扬声器来输出手机的导航音,盲人在喧闹的街道中也能清晰地听到导航播报语音,满足盲人对导航的使用需求。
1.2 GPS定位
在生活实际场景中,当盲人由于各种原因需要向他人发出求助时,需要向求助方描述身处的位置。常人一般会描述身处的环境特征、标志性建筑、路名等信息,由于盲人很难获取上述环境信息,无法向求助方描述准确位置,给求助带来麻烦。
为了解决上述问题,文章中设计GPS模块来实现获取当前所处的精准位置,并通过语音播报通知使用者。被求助方可以通过GPS位置信息来获取使用者的精确位置,为帮助扫清障碍。
1.3 超声避障
传统盲杖在使用时,使用者用手臂驱使盲杖与障碍物发生碰撞,并感受碰撞反馈回的信息,来判断障碍物的位置。这种使用习惯需要大量的训练才能达到熟练使用,即使熟练使用后,仍然会有各种意外情况导致判断出错。
基于此,文章中设计了超声模块与蜂鸣器来实现,利用超声模块不停检测前方障碍物,如果遇到障碍物,通过蜂鸣器通知使用者。
1.4 系统结构
系统采用单片机驱动各个模块来实现智能盲杖系统。整个系统的构造如图1所示。手机的路径导航系统已非常成熟,不需要重新设计。系统中设计了蓝牙喇叭来连接手机,实现导航语音的播放,使用前将蓝牙信号配对好,使用中无需进行其他设置。

图1 智能盲杖系统构造
2 硬件选择
2.1 单片机处理器
单片机作为系统的计算与控制中心,在智能盲杖系统的数据处理量不是特别大,因此,考虑采用AT89C55单片机。AT89C55是一种低功耗,高性能的8位CMOS单片机,与业界标准80C51指令集与引脚完全兼容,内部有256字节的RAM,20字节程序存储器,32个I/O端口,3个16位定时器,8个中断源。
2.2 语音模块
作为系统的输出接口,语音模块有多种选择,本系统采用科大讯飞推出的一款高性价比的中文语音合成芯片,型号为XFS3031CNP。该芯片通过UART接口接收待合成的文本,把文本合成为语音输出,可以采用GB2312、GBK、BIG5和UNICODE四种编码方式。芯片支持英文字母的合成,遇到英文单词时按字母方式发音。另外,芯片还具有智能文本分析功能,对常见的数值、电话号码、时间日期、度量衡符号等格式的文本,芯片能够根据内置的文本匹配规则进行正确的识别和处理。系统的语音模块结构如图2所示。

图2 语音模块结构
2.3 GPS/北斗模块
为了精确获得当前的定位信息,系统通过和芯星通生产的UM220定位芯片,支持GPS/北斗双系统来实现双模定位。UM220内置6轴MEMS器件,可直接输出GMSS与MEMS组合定位结果。模块通过天线获取信号后支持TXD、RXD串口输出,方便信息处理。UM220结构图如图3所示。系统设置有启动按钮,每次按下按钮,触发软件中的中断,利用语音播报模块向使用者播报位置信息。
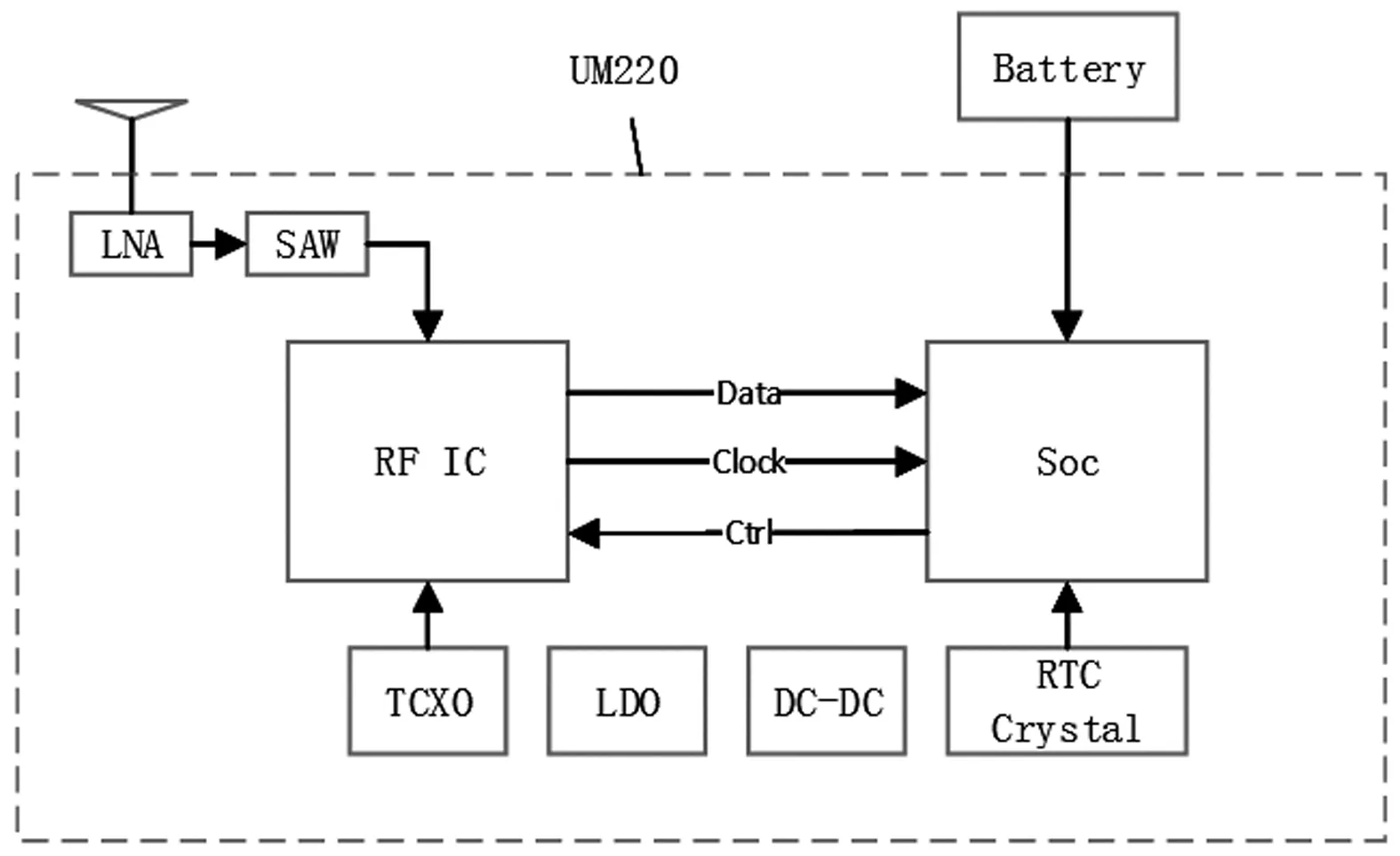
图3 UM220结构图
2.4 超声传感器
超声波测距、避障在机器人领域已经有广泛的运用。超声波发射装置向外发射出超声波,遇到障碍物会产生回波,接收装置接收到回波。从发射出超声波到接收到超声波,之间的时间差为T
,根据T
可以计算出盲杖与障碍物之间的距离S
,其计算公式如下。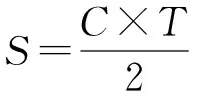
C
为超声波在空气中的传输速度。当距离S
小于限定值SL
之时,蜂鸣器会发出报警。3 软件设计
系统软件采用C语言编写,利用KeiluVision4将代码编译成HEX文件,通过烧录软件将编译后的HEX文件写入单片机,单片机上电执行代码逻辑。
盲杖使用开关打开之后,单片机上电并对各个模块进行初始化。超声避障处理是一个循环,每隔0.
2秒计算障碍物的距离,如果距离超过设定的警戒值,利用蜂鸣器触发报警。系统超声避障的处理流程如图4所示。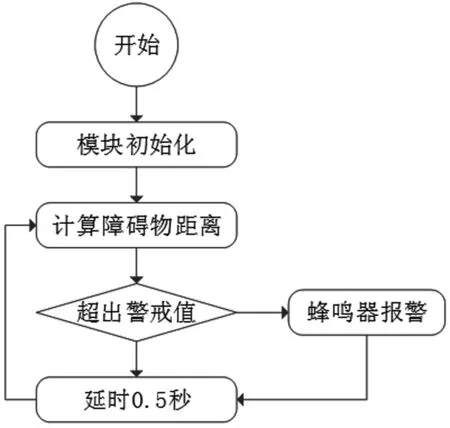
图4 超声避障流程
定位、语音播报通过按钮触发中断实现,使用者按下按钮,中断函数从GPS/
北斗模块中获取定位信息,利用语音合成模块向使用者播报定位信息。中断执行结束之后,重新回到超声避障循环处理,为使用者提供避障服务。中断处理流程如图5所示。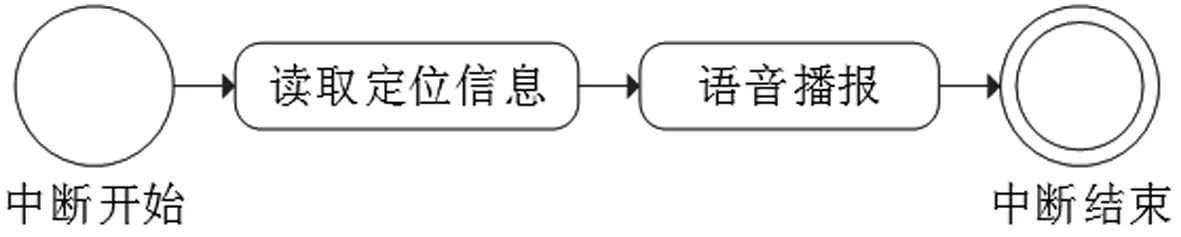
图5 定位播报流程
4 总结
文章设计了一种基于单片机的智能盲杖系统,通过超声模块实现障碍物自动报警,利用支持GPS/
北斗双系统的定位芯片实现定位并进行语音播报,丰富了盲杖的功能,在一定程度上实现了盲杖使用的智能化。整个系统结构设计简单,单片机与各模块的成本低廉。基于单片机的智能盲杖系统,为盲杖的功能扩展提供了思路,为进一步改善盲杖的功能提供了探索。