某220 kV变电站智能巡检机器人的应用实践研究
2022-01-06程玉凯林雅彬
程玉凯, 林雅彬
(国网福建电力公司漳州供电公司, 福建 漳州 363000)
0 引言
变电站运检智能化是变电运维工作发展的一个重要趋势,近年来一些常规AIS变电站逐步配置智能巡检机器人进行辅助巡检工作。智能巡检机器人整合了机器人技术、多传感器融合技术、图像识别技术、导航技术、物联网技术等,对变电站可实现全方位、全天候、全自主智能巡检和监控,可以大大降低运行人员的劳动强度和变电运维成本,减少工作人员的危险系数,使整个变电站巡检工作自动化、电子化、智能化。
某220 kV变电站自2020年下半年配置智能巡检机器人应用至今,巡检工作体验良好,及时发现多次严重缺陷和一次紧急隐患,避免了更大事故的发生,可进行积极推广应用。
1 某220 kV变电站概况
某220 kV变电站与运维主站直线距离80公里左右,靠近海边,常年海风4~5级,是所在县城唯一电源点。该站场地占地面积近30 000 m,巡视路线(室内路线+室外路线)全长接近2公里,采用人工巡视全站至少需要1个小时,其巡视路线如图1所示。
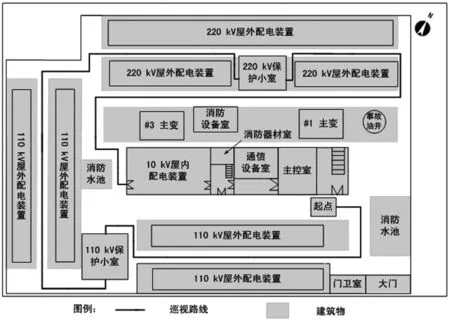
图1 某220 kV变电站人工巡视路线图
据统计,近两年来,因站内异物搭接导致的开关跳闸造成6级及以上电网事故达到10次以上,因此亟需采取必要措施提高供电可靠性。为应对该问题,通过在站内构架、横梁上加装驱鸟器、防鸟刺和防鸟封板的方法,一定程度上减少了海鸟做巢的数量,但通过人工巡视,发现鸟巢等异物搭接在构架、设备上的情况还时有发生。此外,变电站地处东南沿海,温湿度和盐分较高,站内金属部件腐蚀较为严重,直接影响了设备的导电能力和机械性能,同时也降低了构支架的承载能力,对于电网的稳定运行是一大威胁。为应对此问题,除了对设备进行更好的防腐措施外,还需运行人员通过巡视、测温等方法对该站设备进行时时关注、监控。
针对此情况,该站于2020年下半年配置了LER-3100型智能巡检机器人,如图2所示。

(a)巡视主变(b)巡视刀闸
2 LER-3100型机器人简介
LER-3100型智能巡检机器人(以下简称机器人)以自主或遥控方式,在无人值守环境中,可完成对室内(外)高压设备进行红外温度检测和仪表油位的图像识别等任务,可以替代人工完成巡检中遇到的繁琐、危险和重复性工作。
2.1 机器人系统的基本构架
机器人巡检系统为网络分布式架构,整体分为三层:基站层、通讯层和终端层。各层的组成部分如图3所示。
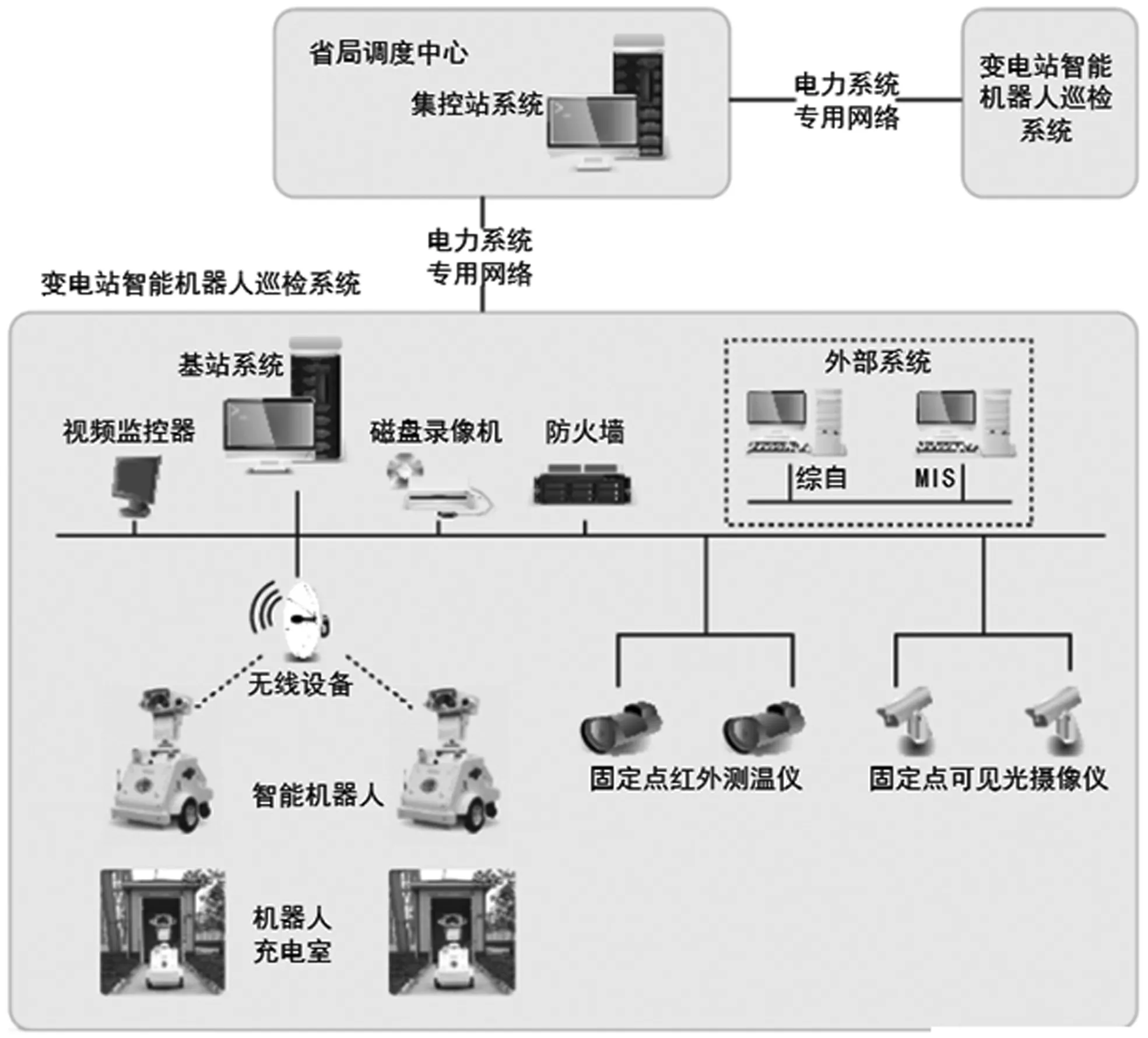
图3 系统构架图
2.2 智能机器人的组成
本款机器人基于无轨化导航技术和运动四轮地盘,及多种高科技技术为一体,主要有7个单元模块组成,如图4所示。
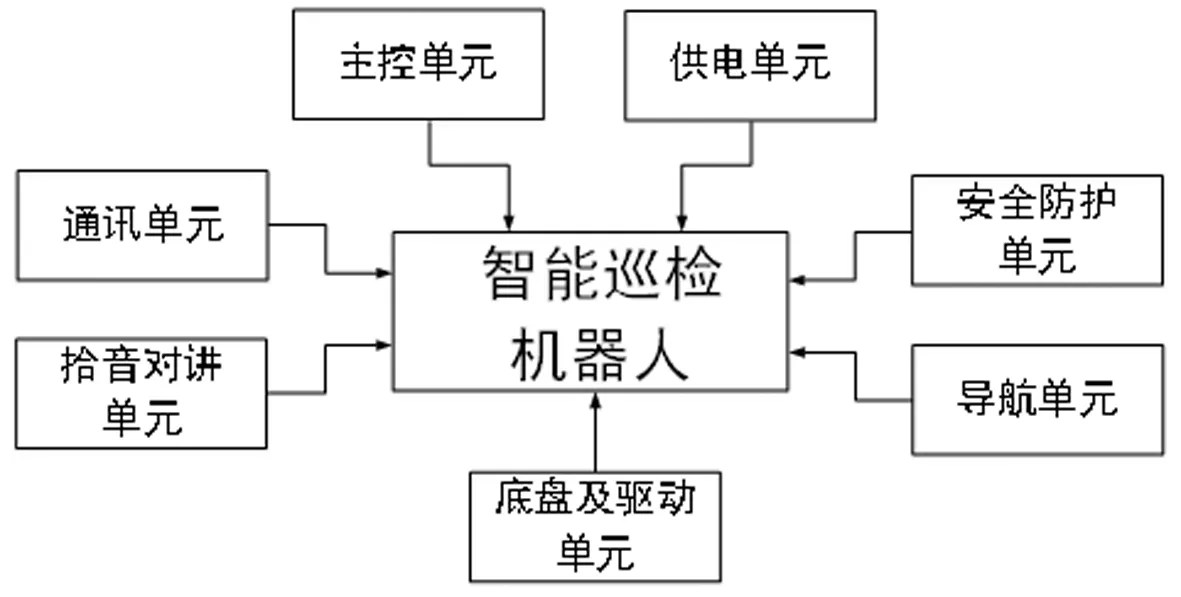
图4 智能巡检机器人的组成单元
由这7个单元模块共同组成的机器人具有无轨化、可调配、智能化、集群化、耐高温和高寒等诸多优势。机器人的近距离外形如图5所示。

(a)机器人正面(b)机器人侧面
2.3 机器人无线通讯
站内无线网络的覆盖,需要在站内和机器人巡检车上各配置一个无线AP(220 kV变电站户外只需配置一个无线AP),两者互联。机器人巡检车上的网络设备通过客户端接入站内无线网络,这样,巡检车可以在任意地点漫游不需执行切换操作,实现了机器人巡检车在整个巡检区域与客户端无缝连接。
2.4 智能巡检机器人的功能
机器人可以在自主或遥控模式下,在无人值守的环境中完成如图6所示的功能任务。
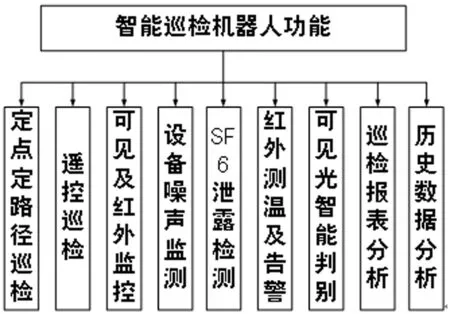
图6 智能巡检机器人的功能
2.4.1 智能巡检
任务巡检主要有全面巡检、例行巡检、专项巡检、特殊巡检等。巡检过程中对于SF压力、避雷器泄漏电流值和动作次数,可以实时智能读取,并可使用历史数据绘制历史曲线,以便监测设备状态的发展趋势。对于巡视过程中发现的异常和缺陷情况,机器人可以进行智能判断上报,并实时显示在后台设备缺陷一栏。
2.4.2 红外测温及告警
利用机器人云台配备的红外测温仪,对设备进行测温成像,并根据标准分布解决方案中特征和方案,提供经济且精确的的测温方案,对于设备的异常温升图像,可以实现实时报警,避免变为严重故障,杜绝了对电网和人身安全造成威胁。
2.4.3 噪声检测
机器人噪声检测主要针对变压器和电抗器等设备,通过专业级拾音器对现场设备进行采音,将音频信号无失真的传输到后台,以便软件对其解析和人员人工识别。
2.4.4 可见光智能判别
机器人拍摄的实时可见光照片,通过与现场定点定角度拍摄的可见光预存照片比较,对图片中的鸟窝、烟雾、火光等异常信息进行判断识别,及时发现影响现场设备的各种隐患。
3 机器人应用
3.1 正常巡视
机器人既可以按照人工设置的巡检计划自主开展巡检工作(巡检计划模式),也可以切换至遥控模式,由人工控制的方式对单一设备进行巡视、观测(远程遥控模式)。机器人的位置、巡检路线等信息均可在后台观测到,如图7所示。
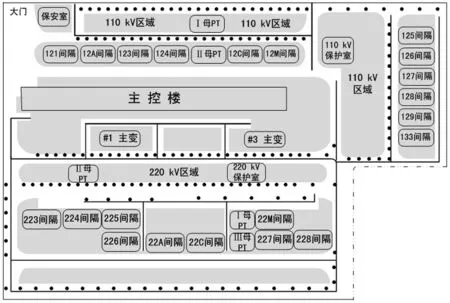
图7 巡检机器人电子地图
图7中黑点表示巡检点,实线表示机器人预制行驶路径。本站室外共设置巡检点2 922个,根据不同的观测类型可以分为9个项目,如表1所示。

表1 检测点项目及数量
机器人对全站设备巡检覆盖率达到99%以上,可对重点设备进行双面甚至多面拍摄。在本站内,按照巡视项目的不同,共规划了6条巡视路线:主变区域红外巡检路线、主变区域可见光巡检路线、110 kV区域红外巡检路线、110 kV区域可见光巡检路线、220 kV区域红外巡检路线、220 kV区域可见光巡检路线。经实地测试,这6条路线耗时如表2所示。
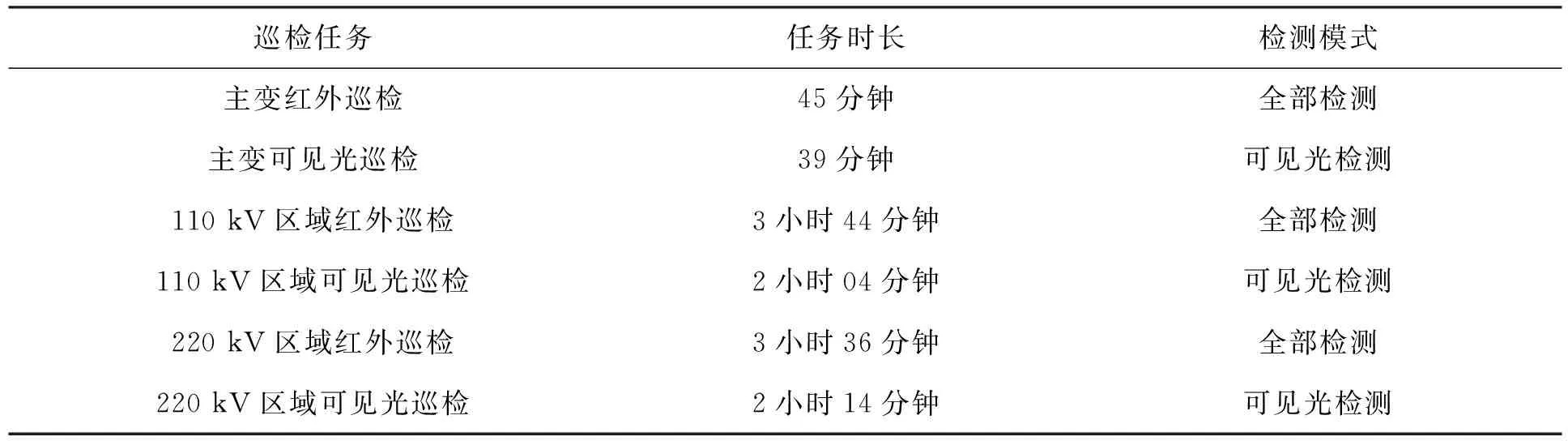
表2 各巡视路线时长
巡检完毕,在后台自动生成巡检报告,其样式如图8所示。
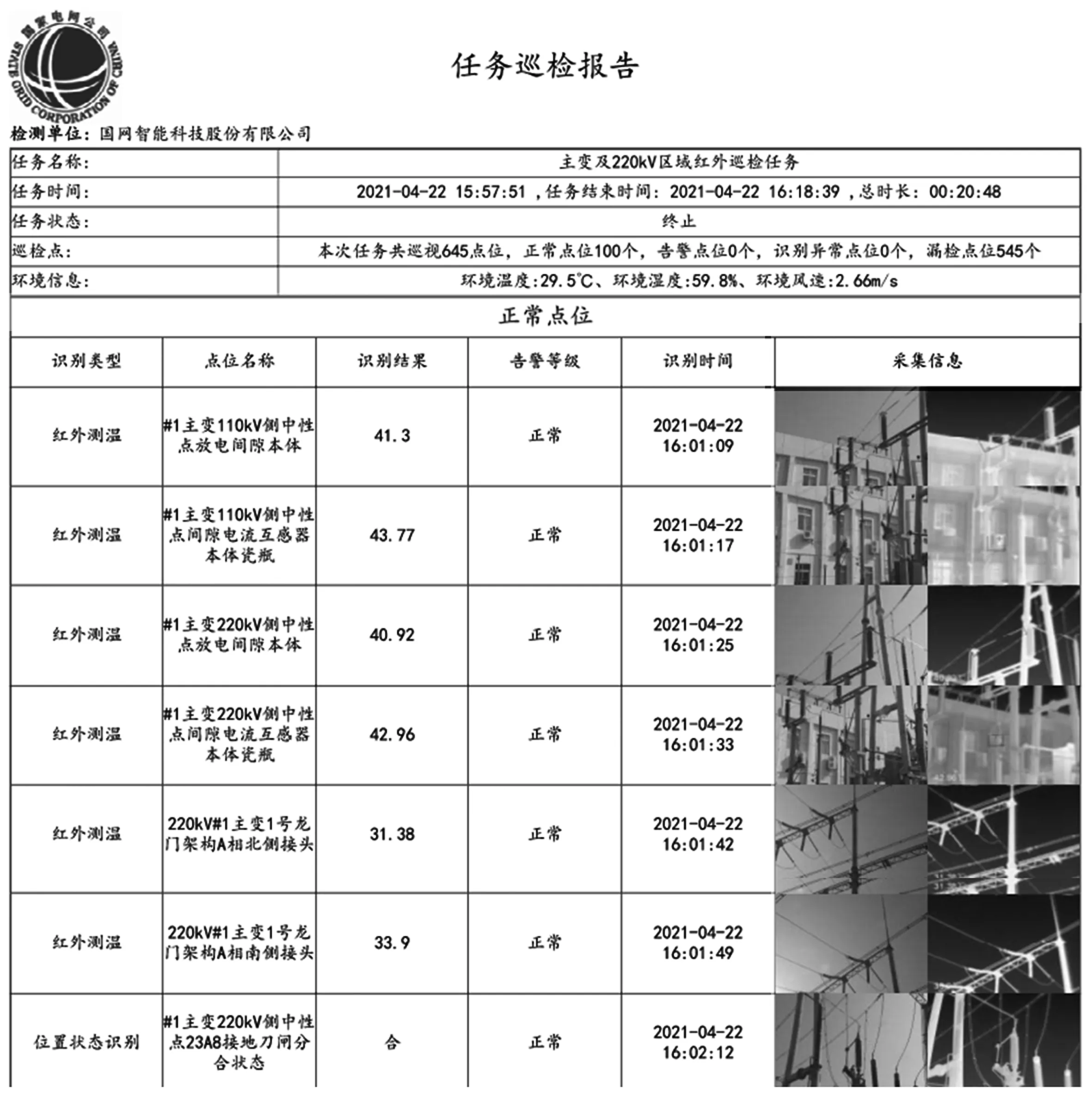
图8 任务巡检报告
如图8所示,巡检报告显示巡检任务名称、任务时间、巡检点信息(包括巡检点总个数、正常点位个数、异常点个数以及漏检点个数)等。各点位会提供包括采集点可见光和红外检测图片等信息,以便用户开展进一步人工筛选和判别。
3.2 异常巡检案例
某220 kV变电站自配置智能巡检机器人以来,已发现设备异物搭接5处,其中危及设备正常运行的一处;发现设备发热5处,其中严重发热2处;发现消防安全隐患4处,严重隐患1处。
3.2.1 鸟窝巡检
2021年3月某日运行人员利用机器人对全站巡检,当机器人行至220 kVⅠ段母线4号门型架附近处,用可见光镜头对构架巡检时,发现在该门型架横梁处有一处鸟窝,如图9(a)所示。由于焦距原因,未能清晰观测垂草长度。于是运行人员立即到现场进行复拍核实,如图9(b)所示。经用望远镜和专业相机观测,发现该鸟窝垂草较长,在风力影响下,飘向220 kVⅠ段母线A相跳线,距离不足2 m。由于该站220 kV母线均未进行绝缘热缩处理,因此若未及时发现,放任鸟窝继续发展,必然会造成220 kVⅠ段母线母差保护动作,导致5级以上电网事故。

(a)机器人可见光镜头照片(b)专业相机可见光照片
3.2.2 可见光智能识别
2021年2月某日机器人按照巡检计划对该站进行例行巡检时,后台接收到异常告警提示。经运行人员仔细筛查核对,发现告警来自机器人在110 kV#1主变110 kV侧12 A间隔定点拍摄的图片识别异常。图10(a)为机器人上次巡视在该定点预存图片,图10(b)为本次巡视在该定点拍摄图片。对比两图,可以发现图10(b)中红框部分有明显的黑色痕迹。运行人员赶至现场检查发现,该处草地有着火痕迹,且仍在继续阴燃,如图10(c)和图10(d)所示。运行人员立即使用灭火器对阴燃部分进行了灭火处理,避免了着火部位的扩大。由于该站在3天前刚对其进行例行巡视,下次人工巡视时间排在一周后,因此,若非本次及时发现,将造成全站草坪着火的严重后果。通过查看站内各角度摄像头,发现该处着火原因为1天前夜晚12A3刀闸A相高温铁屑落至地面所致。继而对12A3刀闸测温发现,12A3刀闸A相出线线夹温度已达300 ℃以上,通过紧急申请停电处理,避免了一次主变跳闸事故。
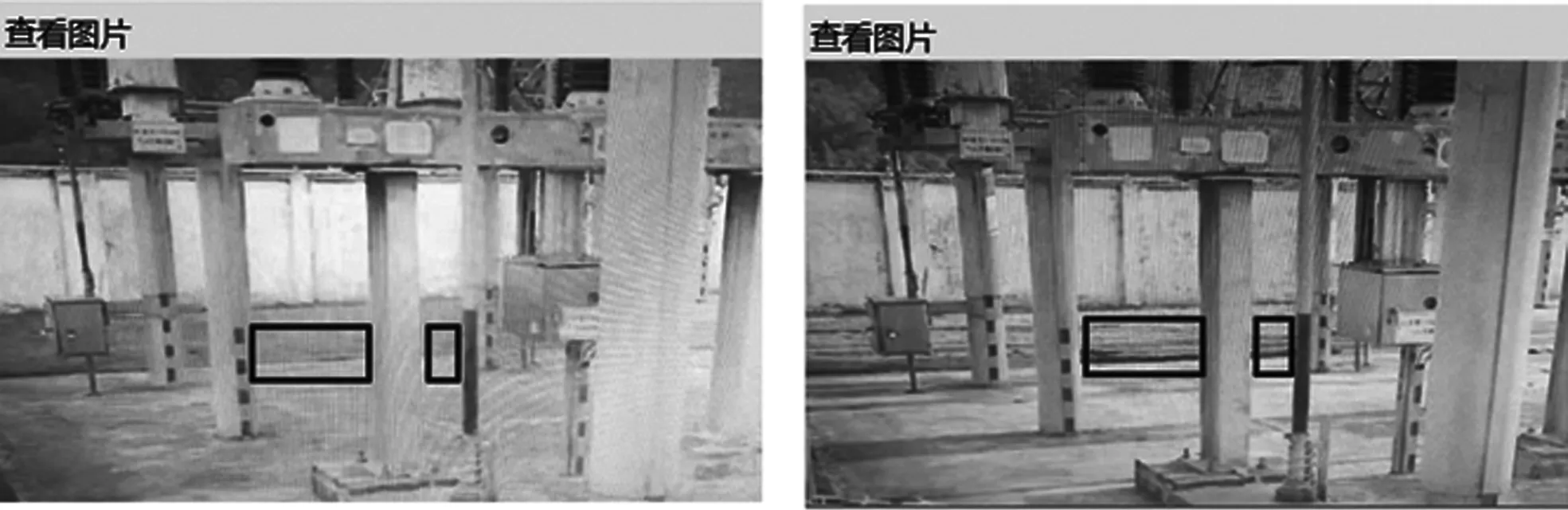
(a)机器人预存照片(b)机器人实时拍摄照片
3.2.3 红外测温异常告警
2021年4月某日夜晚运行人员利用机器人对110 kV设备区域进行红外测温。当机器人行至126间隔区域对1261刀闸测温发现1261刀闸刀口A相比另外两相有明显温升,如图11(a)所示,后台显示红外测温异常告警。当机器人行至127间隔对1273刀闸测温发现1273刀闸C相出线线夹部分对比另外两相有明显温升,如图12(a)所示,后台显示红外测温异常告警。运行人员赶赴现场用萨特HM-300红外测温仪分别对1261刀口和1273刀闸出线线夹进行精确测温,发现1261刀闸A相刀口77.9 ℃,B相20.5 ℃,C相44 ℃(如图11(b)、(c)、(d)所示)以及1273刀闸C相出线线夹温度72.7 ℃(如图12(d)所示),另外两相温度分别为20.5 ℃、20.4 ℃(如图12(b)、(c)所示)。
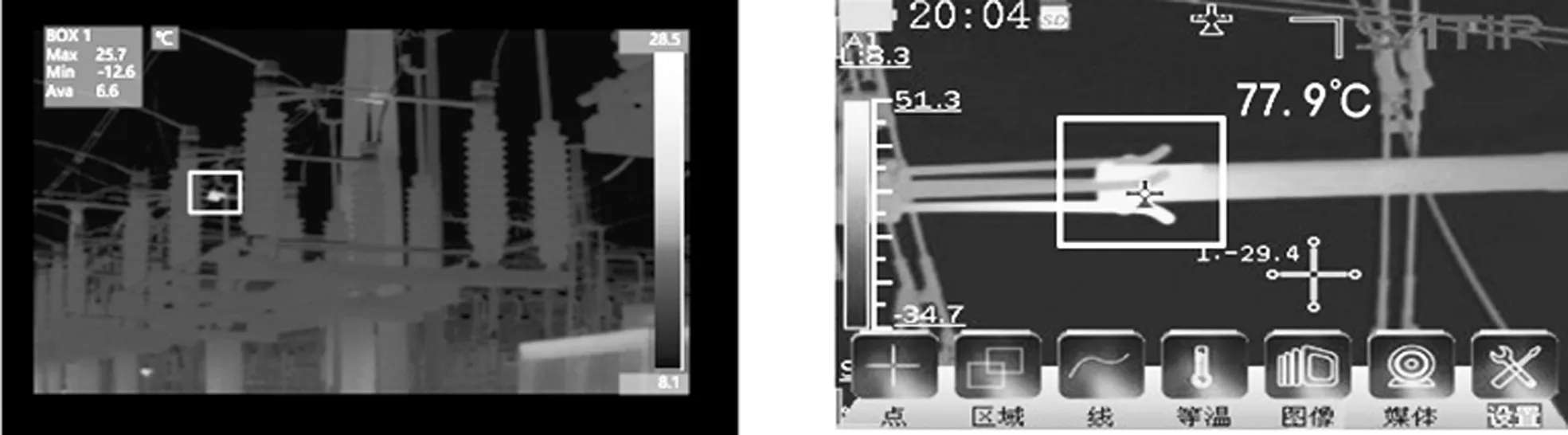
(a)(b)
(a)(b)
利用相对温差判别方法,判断发热点发热程度。相对温差计算公式,如式(1)所示
(1)
其中,τ
、T
表示发热点的温升和温度;τ
、T
表示正常对应点的温升和温度;τ
、T
表示环境参照体的温升和温度。由式(1)可得,1261刀闸A相刀口相对温差δ
=94.
25%
,C相刀口相对温差δ
=87.
03%
,1273刀闸C相出线线夹相对温差δ
=93.
72%
。根据《DL/T664-2016带电设备红外诊断应用技术规范》中电流致热性设备缺陷判断依据的规定:隔离开关刀口热点温度T
满足:90 ℃≤T
<130 ℃或80%
≤δ
<95%
但热点温度未达到90 ℃时为严重缺陷的判断依据,1261刀闸A相和C相刀口温度异常均达到严重缺陷标准。另根据上述规范中规定:电器设备与金属部件的连接(接头和线夹)热点温度T
满足:80 ℃≤T
<110 ℃或80%
≤δ
<95%
但热点温度未达到80 ℃时为严重缺陷的判断依据,1273刀闸C相出线线夹温度异常也达到严重缺陷标准。依照该判据,由运行人员上报严重缺陷,并将此两个间隔列入缺陷跟踪库中,加强跟踪观察。4 结语
智能巡检机器人在本220 kV变电站投入使用后,有效地降低了运行人员的工作强度,提高了工作效率和巡视质量,为本站设备安全平稳运行提供了可靠的保障。但值得注意的是,机器人的使用并非完美无瑕,也存在一些问题:
(1)运行成本大,专业维修技术性较强;
(2)机器人体重大,对巡视路线上的电缆沟盖板有一定破坏性;
(3)机器人行驶速度过慢,对需紧急查看设备状态的情况,路上耗时过长;
(4)续航不足,按表2中,对全站巡视一次需要7个多小时,再计及充电时间,完整巡视全站大概需要2天才可完成;
(5)避障能力不足,需要人工干预等等。变电站智能巡检机器人的应用是一大趋势,只有在使用中不断发现问题、解决问题,才能为变电智能巡检工作提供更好的服务。
