一种二次雷达身份代码聚合提取的方法
2022-01-03羊洪国吴晓华
吴 兵,羊洪国,吴晓华
(四川九洲空管科技有限责任公司,四川 绵阳 621000)
随着世界经济的蓬勃发展,各地的人口流动和物流运输越来越频繁,航空事业也得到了迅猛发展。军/民航空中交通管制系统对目标身份代码探测准确率的要求越来越高,其准确度能极大发挥二次雷达的工作效能,为航管指挥和航空战略决策提供重要依据。
1 二次雷达身份代码简介
二次雷达采用一问一答的工作方式,可通过较小的发射功率获取目标的距离、方位、身份代码、高度等信息。
常规的二次雷达系统工作模式有M1、M2、M3/A、MC。其中M1、M2为军用明码识别模式,M3/A为军民两用识别模式,MC为高度询问。其询问信号编码格式如图1所示,图中的P1、P3为询问脉冲,通过天线和波束对空辐射。P2为旁瓣脉冲,通过天线的控制波束对空辐射。

图1 询问信号编码格式
M1、M2、M3/A、MC的应答码由16个码位组成,其应答信号格式如图2所示。每个码位有两种状态,即有脉冲(“1”)和无脉冲(“0”)。F1和F2码位是框架脉冲,恒为“1”状态。X码位为无人机指示码位,SPI码位是特殊位置识别码位,C1、A1、C2、A2、C4、A4、B1、D1、B2、D2、B4、D4共12位是信息码位,可组成4 096个独立的应答码位[1]。

图2 应答信号编码格式
当接收机接收到应答信号后,经限幅、滤波、放大处理、下变频后输出视频信号,采样后的视频信号发送至译码模块,译码模块对视频信号进行6 dB检测、STC检测、框架解码、旁瓣抑制、去幻影应答、虚假框架抑制、去异步干扰以及信息码位检测[1],最终将应答数据上报至二次雷达数据处理单元。
当多个目标近距离飞行时,会出现目标应答交织,产生码位占据,正常的应答码位幅度会发生畸变,若只基于幅度特征解码会导致虚假框架以及虚假码位,此时需基于相位特征[2]和幅度特征共同完成应答框架和信息码位的脉冲检测。但是实际工程中,因受噪声和多径干扰的影响,在交织下,单次解码完成的身份代码的可靠性不高。故在有效波束范围内多次询问,以多次应答来综合提高身份代码的可靠性。在点迹凝聚过程中,对位置相关成功且满足时限和应答次数要求的节点进行身份代码的处理。传统方法是统计应答代码相同次数,以次数最多者作为最终目标的身份代码。在军航试飞区或民航飞机密集区,上述方法仍会出现提取错误代码和高度的现象。
2 一种二次雷达身份代码聚合提取的方法
针对上述问题,本文提出,译码模块在成功检测到应答框架时,需把检测到的身份代码、码位的应答幅度、应答框架脉冲是否前后交织串扰、每个码位是否占据串扰的情况均置上标志位,然后上报至数据处理单元,由数据处理单元对多次应答的真实情况进行聚合处理。
数据处理单元接收到每一次的译码数据后,根据应答码和码位幅度进行码位置信度标记。每个码位分为1码和0码,同时计算出1码置信度高置信度(S1H)、1码置信度低置信度(S1L)、0码置信度高置信度(S0H)、0码置信度低置信度(S0L)。以C1码位为例,当译码数据中给出的C1码位值为1,C1码位的幅度值为a1,参考脉冲(F1/F2)幅度为a0,1码的高低置信度判断准则如表1所示。当译码数据中给出的C1码位值为0,C1码位幅度值为a1,0码的高低置信度判断准则如表1所示。
本次的译码数据与缓存的点迹节点位置相关成功则缓存本次译码数据所携带的信息,若不成功则新建点迹节点。当点迹节点同时满足时限和相关次数要求,则进行点迹信息处理,其中包括身份代码的获取。若点迹节点满足时限性但不满足相关次数要求,则清除该点迹节点。
上报的身份代码获取是将位置相关成功的所有应答数据,根据应答模式(M1、M2、M3、MC)进行归类,获取携带的代码信息、1码置信度、0码置信度、译码框架同步串扰标志、码位同步串扰标志和单个模式的应答次数。再根据携带信息,对每次应答的每个码位进行1码和0码打分,最后统计出该模式所有应答的分数值,计算公式如下:

式(1)中:f1为码位的1码分值;f0为码位的0码分值;n为单个模式次数;S1为每次应答单个码位的1码分值;S0为每次应答单个码位的0码分值。
若f0<f1<2×f0则对应码位值为1且为低置信度,若f1≥2×f0则对应码位值为1且为高置信度;若f1<f0<2×f1则对应码位值为0且为低置信度,若f0≥2×f1则对应码位值为0且为高置信度。依次对12个信息码位进行上述处理,从而得到最终点迹上报的身份代码和代码置信度。若是高度码的处理需要先进行“五周期循环码”判断后,再按照上述提到的方法继续处理。
在打分处理前,统计出应答数据内每个码位出现码位串扰的概率,以便使用不同打分机制和分值。若码位为0(或1)且码位串扰概率为0%时,其打分流程如图3所示;若码位为0且码位串扰概率大于0%时,其打分流程如图4所示;若码位为1且码位串扰概率大于0%时,其打分流程如图5所示。
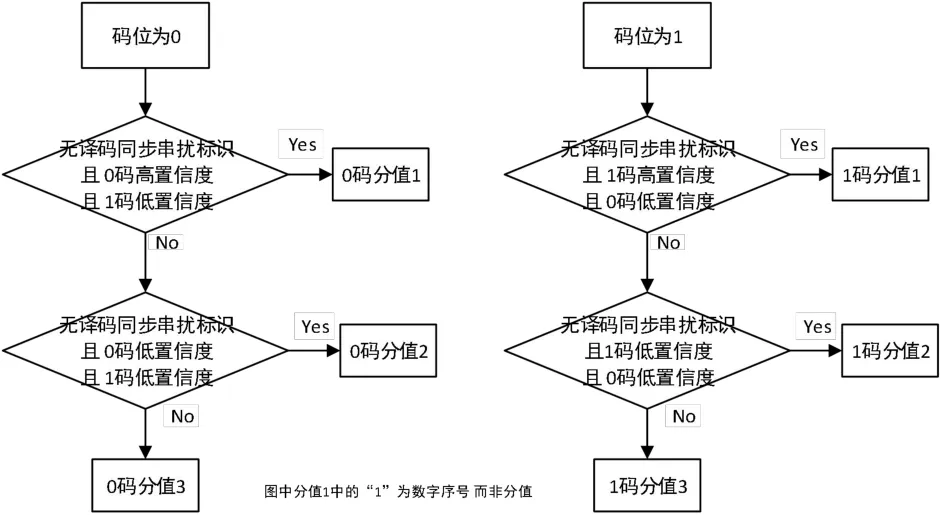
图3 0码/1码无串扰打分机制
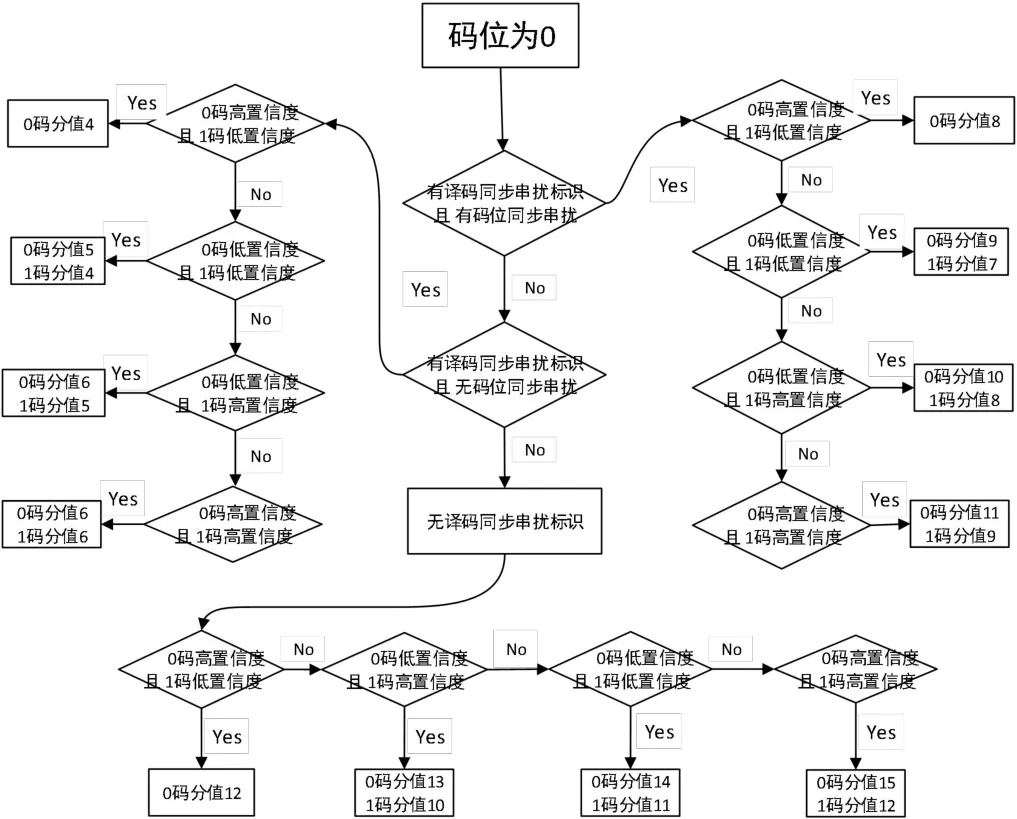
图4 0码有串扰打分机制流程图

图5 1码有串扰打分机制流程图
3 工程实现
在工程实践中,通过C语言实现上述方法,大幅提升了交织应答的代码准确率,目前已在实际工程中应用。工程中采集的某一圈目标应答数据(只提取了M3/A应答数据)以及处理结果如图6所示。在无串扰应答的情况下,基于幅度和相位特征可以准确获取应答信息,采用传统方法获取身份代码。针对有串扰应答的情况下,采用本文提出的方法,能够兼顾处理实时性,提高代码和置信度的准确率。

图6 实际空中应答处理示例图
4 结束语
本文通过对应答数据信息进行多次聚合处理,根据应答的身份代码、码位幅度、框架串扰标志、码位串扰标志、1码位置信度、0码位置信度,分别对每个码位进行打分统计,反映了目标在波束内的真实应答过程,在应答信号局部交织的情况下,可有效提升代码和置信度的准确率;对应答信号全交织的情况下,可准确得到代码码位置信度。为后续航迹处理过程中对点航迹相关和代码纠错有着至关重要的作用。
通过数据分析与比较,本文中的应答代码聚合提取的方法能在一定程度上提升准确率,改善二次雷达设备性能。此方法是以应答码的幅度采样为基准,故还需设备前端降低接收机噪声,提高准确性。
