基于IPSO-MPC的无人驾驶车辆纵向运动控制
2022-01-01李广南叶洪涛罗文广
李广南 叶洪涛 罗文广




摘 要:针对无人驾驶车辆纵向控制中的速度跟踪精度问题,提出一种基于改进的粒子群优化算法(improved particle swarm optimization,IPSO)的模型预测控制方法。首先,在模型预测控制中将问题转换为二次规划问题,使用粒子群算法进行求解,并通过分层纵向控制器,实现对速度的跟踪控制。为降低其陷入局部最优解的风险,引入了随机权重策略和学习因子调整策略。其次,为了提高粒子寻优的速度,保存了上一时刻的最优粒子序列作为下一时刻粒子的群体极值。最后,为了验证算法的有效性,通过Simulink/CarSim建立了联合仿真平臺,仿真结果表明,该算法有效提高了车辆速度跟踪的控制精度,最大误差减小了0.274 7 km/h。
关键词:无人驾驶车辆;模型预测控制;粒子群算法;纵向控制
中图分类号:TP273;U471.15 DOI:10.16375/j.cnki.cn45-1395/t.2022.01.014
0 引言
运动控制是无人驾驶车辆研究领域中的核心问题之一,车辆根据周围环境以及车辆状态信息向油门、刹车以及转向系统等发出控制指令[1]。其中,纵向控制主要研究车辆的速度跟踪能力,控制车辆按照预定的速度行走是实现车辆稳定跟踪期望轨迹的关键。
模型预测控制(model predictive control,MPC)具有预测模型、滚动优化和反馈校正等特点,适用于不易建立精确数学模型且存在约束条件的控制。 文献[2]提出了一种模型预测控制(MPC)框架的自动地面车辆速度跟踪的控制方法,结合简单的纵向逆动力学模型和MPC自适应调节,实现车辆纵向速度的控制。文献[3]提出了一种分层控制架构下的智能电动汽车纵向跟车运动自适应模糊滑模控制方法,上位控制器由滑模控制器与自适应模糊控制器组成,下位控制器根据控制方式由纵向动力学逆模型计算出期望力矩,实现对加速度期望值的跟踪。同样地,文献[4]使用车辆纵向运动的上下位分层控制器结构,在上位控制器中提出改进的MPC算法,下位控制器根据期望加速度求解发动机节气门开度和制动压力。
众多研究学者还将其他优化算法加入纵向运动控制中。文献[5]引入了一种带有混沌初始化的粒子群优化算法(CPSO),将其应用到模型预测控制中, 用于解决同时带有输入约束和状态约束的控制问题。文献[6]设计了基于PSO算法的模型预测控制器,通过粒子(MPC中的参数[Np]、[Nc])和该粒子所对应的适应值(控制系统的性能指标)建立联系,能够有效地对车辆轨迹进行跟踪。文献[7]通过数值验证,证明使用一种改进的粒子群算法可以降低计算迭代次数,减少MPC计算成本。
纵向控制可分为直接式和分层式2种控制方式,为了便于研究控制系统,本文采用分层控制结构。在上位控制器中,针对二次规划求解优化问题不够精确的问题, 对基本粒子群算法进行改进,由此设计上位控制器输出期望的加速度,下位控制器运用逆纵向动力学输出期望节气门开度和期望制动压力,对车辆速度跟踪效果问题进行研究。
1 无人驾驶车辆纵向控制器策略
无人驾驶车辆的纵向速度控制器框图如图1所示。根据参考速度以及道路信息,纵向上位控制器对参考速度进行跟踪控制,通过目标函数得到控制量,输出车辆的期望加速度[ades]给下位控制器。下位控制器运用切换逻辑以及逆纵向动力学输出期望节气门开度信号[αthdes]或期望制动主缸压力信号[Pbdes],控制无人驾驶车辆跟踪期望的速度。
2 纵向控制器设计
2.1 上位控制器设计
车辆在行驶过程中,假设没有横摆运动对车辆纵向运动控制的影响,近似认为车辆的加速度等同于纵向速度的导数,利用一阶惯性系统[8]来表示:
[a=(K/τd)×(ades-a)], (1)
其中:[a]为纵向加速度,[ades]为期望加速度,[K]为系统增益,[τd]为时间常数。
考虑速度与加速度之间的关系,速度跟踪控制用连续系统的状态方程表示:
[x=Ax+Bu], (2)
式中:[x∈R2]为系统纵向状态变量,[x=[va]T];[u∈R]为系统控制输入,[R]为实数集, [u=ades];[A=010-1/τd],[B=0K/τd]。将式(2)通过向前欧拉法进行离散化处理,得系统的离散状态方程:
[x(k+1)=Akx(k)+xku(k)], (3)
其中,[Ak]、[xk]分别为状态矩阵和控制输入矩阵,矩阵分别表示为[Ak=1Ts01-Ts/τd],[xk=0KTs/τd],[k]为当前采样时刻,[k+1]为下一采样时刻,[Ts]为采样周期。
系统输出量为车辆速度[v(k)]:
[v(k)=Cx(k)], (4)
式中:[C=10].
在无人驾驶车辆控制系统中,车辆的控制目标是在保证车辆不发生过于剧烈的加速度和加速度变化率的前提下,保证速度跟踪精度,因此,将性能评价函数定义为:
[J(x(k), u(k-1), △u(k))=]
[i=1NPVp(k+i|k)-Vref(k+i|k)2Q+]
[i=1Nc△u(k+i)2W] , (5)
式中:[k-1]为上一采样时刻,[NP]为预测步长,[Nc]为控制步长,[Vp(k+i|k)]为控制输出预测值,[Vref(k+i|k)]为控制输出变量参考值,[(k+i|k)]和[△u(k+i)]分别表示根据[k]采样时刻的状态信息来预测第[k+i]时刻的信息和第[k+i]时刻的控制输入增量,其中[i=1, 2, …, Np];[Q]为系统输出量的权重系统矩阵,[W]为系统控制增量的权重系统矩阵。
在控制器跟踪速度过程中,需要考虑添加主动约束,即控制过程中的加速度约束及其变化率约束,保证其约束在合理的范围之内,其不等式表达如下:
[umin≤u(k+i)≤umax],[i=1, 2, …, Nc-1], (6)
加速度变化率约束表达形式为:
[△umin≤△u(k+i)≤△umax],[i=1, 2, …, Nc-1], (7)
其中:[umin]和[umax]为纵向加速度阈值,[Δumin]和[Δumax]为纵向加速度变化量阈值,[u(k+i)]是[k+i]时刻的控制输入。
系统在每个周期完成对优化问题的求解,得出每个周期一系列的最优解控制输入增量[ΔU*],并将第一个控制增量作为系统的实际输出变化量,加入系统中。在新的时刻,系统根据系统状态,重新预测下一时刻的一系列控制增量,不断在线滚动优化,直到完成控制过程。
2.2 二次优化问题的转化
结合性能要求,优化问题可以转化为标准的二次规划(QP)问题进行求解,式(7)可以简化成以下形式:
[minΔU12ΔUTHΔU+GTΔU], (8)
[s.t. ΔUmin≤ΔU≤ΔUmax],
[Umin≤AtΔU+Ut≤Umax],
式中:[H∈R2×2]对称正定,[G∈R2],[ΔU=Δu(k),Δu(k+1), …, Δu(k+Nc)T],[Ut=1Nc][⊗][u(k-1)],[1Nc] 为Nc行的单位列向量,[u(k-1)]为上一时刻实际控制量,[ΔUmin]和[ΔUmax]为控制时域内加速度变化量的最小值、最大值集合,[Umin]和[Umax]为控制时域内加速度的最小值、最大值集合,[At=100…0110…0111…0⋮⋮⋮⋮111…1Nc×Nc].该优化问题可以通过MATLAB提供的QP求解器quadprog函数来实现:
[ΔU∗=quadprog(H, G, Ak, Bk)]
2.3 下位控制器设计
下位控制器的作用是根据期望加速度对车辆进行准确控制,该控制会涉及到车辆制动和驱动模式的切换过程,以及将控制量转换为执行器控制 输入。
考虑空气阻力、滚动阻力以及坡度阻力,将车辆阻力需求加速度方程[9]用式(9)表示:
[mathre=Fres=Froll+Faero+Fgrade], (9)
式中:[m]为车辆质量,[athre]为阻力需求加速度,[Fres]为阻力合力,[Froll]为滚动阻力,[Faero]为空气阻力,[Fgrade]为坡度阻力。
坡度阻力为汽车重力沿坡道的分力,在CarSim中设置了坡度为[ia]的直线道路,其中[ia=tanα],[α]为坡角。因此,考虑坡度较小时,重力加速度g取9.8 m/s2,坡度阻力[Fgrade]:
[Fgrade=m×g×ia], (10)
滚动阻力[Froll]为:
[Froll=m×g×cosα×Cr], (11)
式中:[Cr]为滚动阻力系数。
空气阻力[Faero]为:
[Faero=12×ρa×Sa×CW×v2], (12)
式中:[CW]為空气阻力系数;[ρa]为空气密度,正常的干燥空气可取[1.29] kg/m3;[Sa]为车辆迎风面积。假设车辆在行驶过程中,以上参数均不发生变化。
在设计逻辑切换的过程中,要保证制动和驱动模式不能同时起作用,也要根据现实情况,不能频繁地切换制动和驱动模式。因此,根据期望加速度定义以下逻辑切换:
[αthdes=αthdes, ades≥-αthre0, ades<-αthre], (13)
[Pbdes=0, ades>-αthrePbdes, ades≤-αthre], (14)
式中:[αthdes]为期望节气门开度,[Pbdes]为期望制动主缸压力。
经过驱动模式或制动模式的逻辑切换时,当期望加速度大于等于阻力需求加速度时,切换为驱动模式。考虑车辆内部的旋转构件换算质量、道路坡度阻力、空气阻力以及滚动阻力,可以得到驱动模式下车辆的驱动力[FE]为:
[FE=δmades+Fgrade+Froll+Faero] , (15)
式中:[δ]为旋转质量换算系数,通过经验公式得到。
因此得发动机所需的输出扭矩[10-11]为:
[Te=FErwigi0η] , (16)
式中:[rw]为车轮有效半径,[ig]为变速器减速比,[i0]为主减速器传动比,[η]为传动系机械效率。根据车辆发动机转速[n]、节气门开度、发动机输出扭矩[Te]三者的关系,以及转速和有效扭矩,通过发动机扭矩[TMAP]可得到节气门开度[αthdes]为:
[αthdes=T-1MAP(n, Te)], (17)
当逻辑切换为制动模式[12]时,考虑道路坡度阻力、空气阻力以及滚动阻力,当前车辆需求制动力[FB]为:
[FB=-mades-Fgrade-Froll-Faero], (18)
期望的制动主缸压力计算为:
[Pbdes=FBkB], (19)
式中:[kB]为制动力与制动主缸压力的比值。
通过制动驱动模式切换以及计算,得到期望节气门开度[αthdes]和期望制动主缸压力[Pbdes],将控制量作为执行器控制输入,控制车辆根据期望的速度 行驶。
3 优化PSO结合的MPC算法
采用模型预测控制进行速度跟踪的基本思想是车辆在根据期望速度行驶的过程中,将最优化问题转化为一个带约束的二次规划问题进行求解。针对原本QP算法在求解过程中出现精度不足的问题,本文利用改进型的粒子群优化算法对性能指标进行优化,解出控制律。
3.1 算法介绍
在粒子群算法中,假设在一个[S]维的目标搜索空间中,有[M]个粒子组成一个粒子群体,粒子在[S]维的搜索空间中以一定的飞翔速度搜索,每一个粒子所在的位置都是一个潜在的解,粒子根据目标函数计算出其适应值,根据适应值的大小判断该粒子的优劣性。在[S]维中,第[i]个粒子的位置为:[Xi=xi1, xi2, …, xiS];第[i]个粒子的速度表示为:[Vi=vi1, vi2, …, viS],[1≤i≤S]。粒子在游历过程中,第[i]个粒子经历过的历史最好点,即个体极值[pbest]表示为:[PiS=pi1, pi2, …, piS];整个粒子群迄今为止搜索到的最好的位置,即群体极值[gbest]表示为 [PgS=pg1, pg2, …, pgS],[g∈1, 2, …, M]。
空间中各粒子随着每一次的迭代都会不断地更新自己的状态[13],其速度和位置的更新方程为:
[viS(t+1)=ωviS(t)+c1r1(t)piS(t)-xiS(t)+c2r2(t)pgS(t)-xiS(t)], (20)
[xiS(t+1)=xiS(t)+viS(t+1)], (21)
式中:[ω]为惯性因子,其大小可以保证粒子的搜索能力,[ω]较大时可以保证全局的搜索能力,反之,局部搜索能力较强;正常数[c1]和[c2]称为学习因子,分别调整粒子飞向自身、全局最好位置方向的步长;[r1]和[r2]为互相独立且均匀分布于[0,1]的2个随 机数。
设[f(x)]为最小化的目标函数,则第[i]个粒子当前位置[pi(t+1)]由以下公式确认:
[xiS(t+1)=xiS(t)+viS(t+1)], (22)
[pi(t+1)=pi(t), f(xi(t+1)≥f(pi(t))xi(t+1), f(xi(t+1)<f(pi(t))]. (23)
3.2 改进粒子群算法
由于PSO在优化过程中会向自身历史最佳位置以及群体中历史最佳位置靠近,而且其优化速度跟其初始化设置参数有很大联系,使得粒子容易陷入局部最优或停滞,导致输出结果波动较大[14-15]。因此,为了提高粒子群算法效率,对粒子群算法进行改进。
3.2.1 添加壓缩因子
在优化过程中,算法容易陷入局部寻优中,会直接影响算法的性能,从而导致优化出的参数不精确。为确保算法的收敛性,在粒子的每一步移动过程中添加压缩因子,不仅能够满足收敛速度,而且收敛精度大大提高。对粒子更新方程进行如下改进:
[viS(t+1)=ψωviS(t)+c1r1(t)piS(t)-xiS(t)+]
[c2r2(t)pgS(t)-xiS(t)] , (24)
[xiS(t+1)=xiS(t)+viS(t+1)] , (25)
式中:[ψ]为压缩因子, [ψ=22-φ-φ2-4φ],其中[φ=c1+c2>4]。
3.2.2 调整惯性权重
在MPC计算求解过程中要求时间越短越好,在粒子群算法中需要多次迭代收敛才能寻找到最小值。惯性权重[ω]是PSO优化算法的可调参数之一,其大小控制了迭代过程中历史因素对当前状态的影响程度[16]。为了更好地平衡算法的全局搜索与局部搜索能力,加入了随机权重策略[ω],使得粒子的历史速度对这一时刻速度具有随机影响性,克服[ω]的线性递减所带来的不足。[ω]的取值为:
[ω=μ+σ×N(0, 1)μ=μmin+(μmax-μmin)×rand(0, 1)], (26)
式中:[μmin]为随机权重平均值的最小值,[μmax]为随机权重平均值的最大值,[σ]为随机权重的方差,[N(0, 1)]表示标准正态分布的随机数,[rand(0, 1)]表示[0]~[1]的随机数。
3.2.3 调整学习因子
在基本的粒子群算法中,认为粒子在寻找最优值的过程中,其自我学习能力及群体的学习能力是一样的,即学习因子[c1]、[c2]的取值是固定的;但是在迭代初级阶段,粒子具有较强的自我学习能力,而在迭代后期,粒子需要较强的社会学习能力去快速收敛,寻找最优值[17-18]。因此,学习因子[c1]在算法求解过程中应呈线性递增形式,学习因子[c2]在算法求解过程中呈线性递减形式。
[c1=c1min+(c1max-c1min)×itKt], (27)
[c2=c2min+(c2max-c2min)×itKt], (28)
式中,[it]为当前迭代次数,[Kt]为最大迭代次数[(it=1, 2, …, Kt)]。但是在求解适应度函数值时,其收敛曲线并不是呈线性递减的直线而是呈指数函数趋势递减的形式,这会导致学习因子的递增递减程度与适应度函数变化程度不一致的现象。因此,将线性递增递减的曲线修改为呈指数函数趋势的曲线,与适应度函数变化曲线相匹配,设置学习因子形式如下所示:
[c1=c1min+(c1max-c1min)×(itKt)1it], (29)
[c2=c2min+(c2max-c2min)×(itKt)1it]. (30)
3.3 IPSO-MPC算法流程与步骤
经改进后的粒子群优化算法,其算法流程如 图2所示[19]。
将粒子群算法和MPC相结合,把输入向量[ΔU]作为优化变量,则粒子群中各个粒子的维数等同于预测的控制时域;目标函数选取式(8)计算各个粒子的适应度;由于这一时刻的优化变量的最优解与上一时刻优化变量的最优解的变化不大,为保证优秀粒子的影响力,将上一时刻的控制序列作为下一时刻粒子的[gbest]初值,提高算法的效率。算法的具体步骤如下:
Step 1 初始化[MPC]參数以及粒子群参数,采集第[k]时刻[Carsim]输出的系统状态量信息;
Step 2 根据车辆模型、状态量和输入量,计算出优化问题中的矩阵[H]和[G],以及目标函数[J(△u(k))];
Step 3 运用粒子群优化算法进行求解,根据目标函数以及约束,进行迭代计算,直到满足终止条件,得到该控制时域内的一系列控制输入增量[ΔU];
Step 4 将该控制序列中第一个元素[△u∗(k)]作为实际的控制输入增量作用于系统中;
Step 5 令[k=k+1],循环执行,直到系统完成控制过程。
4 仿真验证
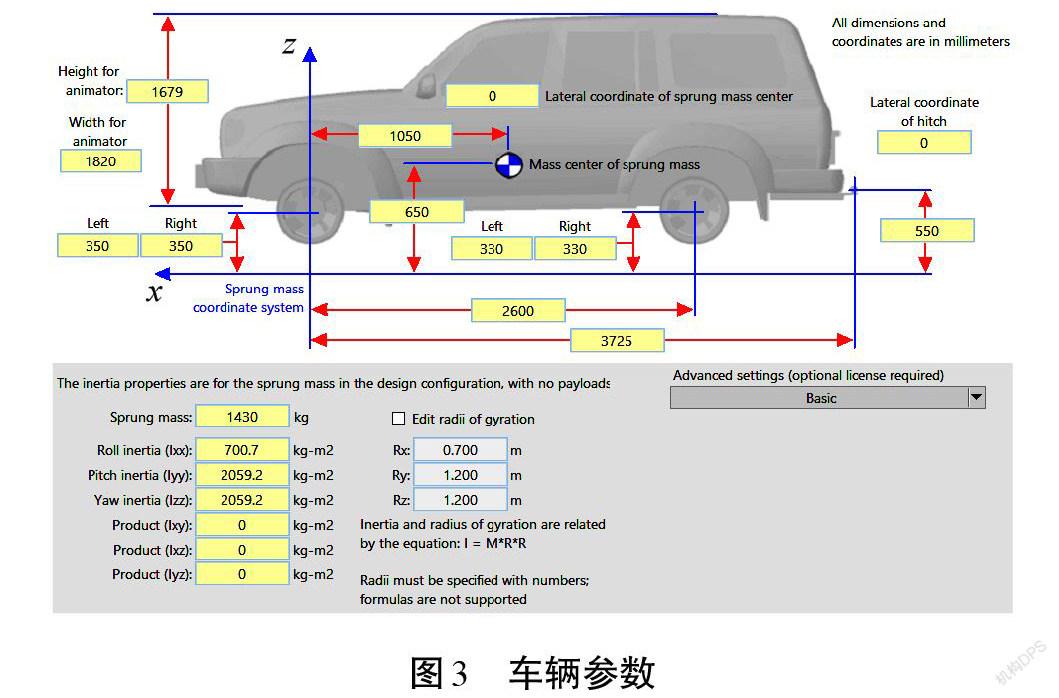
为验证粒子群算法结合MPC算法的有效性,通过搭建Simulink/CarSim联合仿真平台,对所设计的控制器进行仿真验证,并与MATLAB提供的QP算法进行比较分析。 在MPC控制器中,预测步长[Np=30],控制步长[Nc=2],采样时间[Ts=0.02] s,[umin=-5] [m/s2],[umax=3.5] [m/s2],[Δumin=-5] [m/s2] ,[Δumax=5] [m/s2],系统输出量的权重系统系数[Q=200],控制增量的权重系统矩阵[W=2]。粒子群算法中的参数数值为:最大迭代次数[Kt=100],粒子群数目[M=30],学习因子[c1=2.1],[c2=2], [φ=4.1],[μmin=0.5], [μmax=0.8],[σ=0.2],压缩因子[ψ=0.729 8],[c1min=c2min=0.5],[c1max=c2max=3.5]。由于不同的路面附着系数对车辆的控制量输出有较大的影响,因此,将附着系数设置为0.85,并考虑车辆行驶坡道情况,设置在坡度[ia=0.05]的工况下进行测试。实际测试中,车辆空气阻力系数数值为0.28~0.40。车辆迎风面积数值为1.4~2.6 [m2],良好路面的滚动阻力系数为0.008~0.030。综合考虑,模型参数取值为:滚动阻力系数[Cr=0.016],空气阻力系数[CW=0.280],车辆迎风面积[Sa=2.51] [m2],[rW=0.379] m,[i0=4.1],[η=0.95],[kB=]1 350 [N·m/Pa]。仿真测试选用的车型为D-Class,SUV,车辆具体参数如图3所示。
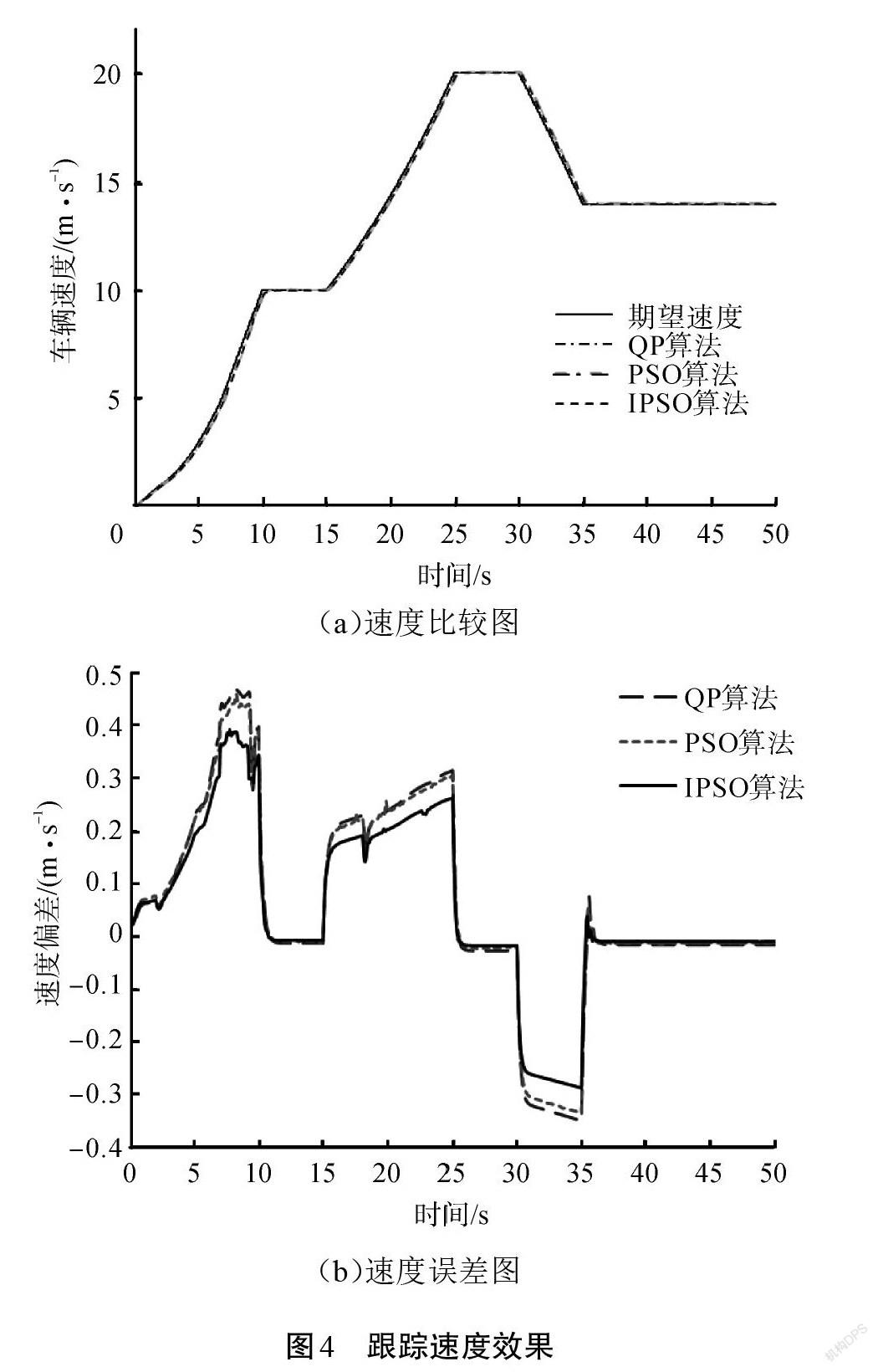
在有坡度的道路工况下,验证控制器的有效性,设置了包含不同加速度的加速过程与减速过程的期望速度曲线,车辆根据该期望速度曲线进行速度跟随控制,对控制算法进行仿真验证,其车辆速度比较以及速度误差图如图4所示。
如图4所示,车辆的实际行驶速度与参考车速基本上重合,3种算法都能实现很好的跟踪,在加速以及减速过程中会有较小的超调量,但随后很快跟随期望速度进行行驶。但在3种算法中,IPSO算法的误差要比PSO和QP算法小,在加速过程中最大的跟随误差为0.392 2 m/s,减速过程的最大跟随误差为0.283 8 m/s,且整体的跟踪误差结果效果更好。控制器速度跟踪误差如表1所示。
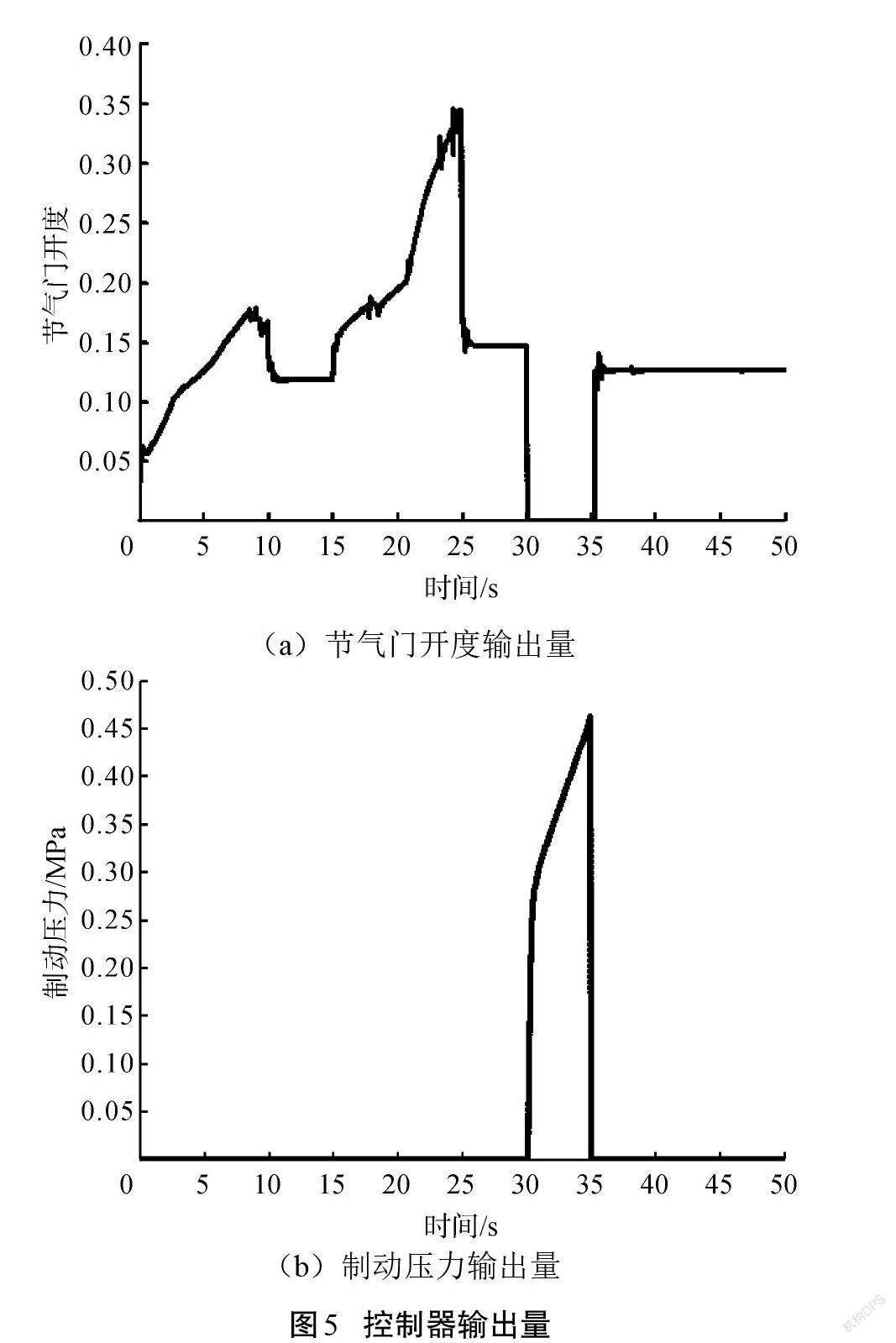
在IPSO控制器算法中,节气门开度和制动压力控制量如图5所示,并没有出现频繁切换驱动制动模式及同时起作用的情况,满足控制的需求。
同时,为控制系统的实时性,记录单次解算时间,从控制器获取车辆状态信息进行问题的构建和分析求解,得到输出控制量之间的时间长度。
对有坡度的道路工况中每个控制周期的单次解算所需时间进行统计,如图6所示,加了IPSO优化算法的MPC控制器的计算时间约20 ms。由于IPSO算法是基于MPC框架,需要进行优化求解,单次解算时间相对于QP时间要长,但远小于无人驾驶车辆实时控制周期50 ms,故满足实时性要求。
5 结论
本文针对基于模型预测控制方法的无人驾驶车辆纵向控制中的速度跟踪精度问题,利用一种改进型的粒子群优化算法求解该问题。纵向速度控制采用分层控制结构,上位控制器采用一阶惯性环节预测车辆状态信息,利用IPSO优化算法求解目标函数的最优解,得出车辆的期望加速度;下位控制器通过逆纵向动力学模型得出期望节气门开度以及制动主缸压力,在Simulink/CarSim建立了联合仿真平台进行验证,在有坡度的道路工况下能够有效地使车辆实现纵向加速、匀速和减速的速度跟随,并且控制车辆速度的最大误差减小了0.274 7 km/h,符合控制实时性的要求,证明了改进型控制器的有效性。
参考文献
[1] 郭景华,李克强,罗禹贡.智能车辆运动控制研究综述[J].汽车安全与节能学报,2016,7(2):151-159.
[2] ZHU M,CHEN H Y,XIONG G M.A model predictive speed tracking control approach for autonomous ground vehicles[J].Mechanical Systems and Signal Processing,2017,87:138-152.
[3] 李文昌,郭景华,王进.分层架构下智能电动汽车纵向运动自适应模糊滑模控制[J].厦门大学学报(自然科学版),2019,58(3):422-428.
[4] 刘富春,贺云,陈奕峰.时延MPC自主车辆协同控制算法与仿真[J].计算机工程与应用,2019,55(23):222-227.
[5] 董娜,陈增强,孙青林,等.基于粒子群优化的有约束模型预测控制器[J].控制理论与应用,2009,26(9):965-969.
[6] 唐传茵,赵懿峰,赵亚峰,等.智能车辆轨迹跟踪控制方法研究[J].东北大学学报(自然科学版),2020,41(9):1297-1303.
[7] 周晶晶,徐友春,张自立,等.IPSO-MPC算法在智能车纵向速度控制中的应用[J].军事交通学院学报,2017,19(4):38-42.
[8] 龚建伟,姜岩,徐威.无人驾驶车辆模型预测控制[M].北京:北京理工大学出版社,2014.
[9] 谢辉,刘爽爽.基于模型预测控制的无人驾驶汽车横纵向运动控制[J].汽车安全与节能学报,2019,10(3):326-333.
[10] 李芳.智能车辆轨迹跟踪的横纵向协同控制研究[D].重庆:重庆邮电大学,2018.
[11] HU P,GUO J,LI L H.A robust longitudinal sliding–mode controller design for autonomous ground vehicle based on fuzzy logic[J].International Journal of Vehicle Autonomous Systems,2013,11(4):368-383.
[12] 邓涛,李鑫.智能车辆横纵向运动综合控制方法研究[J].重庆交通大学学报(自然科学版),2021,40(4):133-140.
[13] MOHANTY P K,DEWANG H S. A smart path planner for wheeled mobile robots using adaptive particle swarm optimization[J].Journal of the Brazilian Society of Mechanical Sciences and Engineering,2021,43(2):101-118.
[14] 高飛.MATLAB智能算法超级学习手册[M].北京:人民邮电出版社,2014.
[15] 郁磊.MATLAB智能算法30个案例分析[M].北京:北京航空航天大学出版社,2011.
[16] 皮倩瑛,叶洪涛.一种动态调节惯性权重的粒子群算法[J].广西科技大学学报,2016,27(3):26-32.
[17] 丁承君,阎欣怡,冯玉伯,等.基于APF的AGV局部路径规划改进算法研究[J/OL].计算机工程与应用,2021:1-10[2021-06-27]. https://kns.cnki.net/kcms/detail
/11.2127.TP.20210420.1504.085.html.
[18] YU X,YU Q. Enhanced comprehensive learning particle swarm optimization with dimensional independent and adaptive parameters[J].Computational Intelligence and Neuroscience,2021,2021(6):1-16.
[19] 許家赫,陈岳坪.改进粒子群算法与fmincon函数混合寻优的平面度、垂直度误差评定[J].广西科技大学学报,2019,30(4):105-109.
Longitudinal motion control of unmanned vehicle based
on IPSO-MPC
LI Guangnan1,3, YE Hongtao*1,2,3, LUO Wenguang1,3
(1.School of Electrical, Electronic and Computer Science, Guangxi University of Science and Technology,
Liuzhou 545616, China; 2. Guangxi Key Laboratory of Automatic Detecting Technology and Instruments (Guilin University of Electronic Technology), Guilin 541004, China; 3. Guangxi Key Laboratory of Automobile
Components and Vehicle Technology (Guangxi University of Science and Technology), Liuzhou 545006, China)
Abstract: A model predictive control method based on an improved particle swarm optimization algorithm (IPSO) was proposed to solve the speed tracking accuracy problem in the longitudinal control of unmanned vehicles. Firstly, the model predictive control converted the problem into a quadratic programming problem, used particle swarm algorithm to solve it, and implemented the speed tracking control through the layered longitudinal controller. The random weight strategy and the learning factor adjustment strategy were used to reduce the risk of falling into a local optimal solution. Secondly, the optimal particle sequence at the previous moment was preserved as the population extreme value of the particle at the next moment to improve the speed of particle searching. Finally, a co-simulation platform was established through Simulink/CarSim to verify the effectiveness of the algorithm. Simulation results show that the algorithm effectively improves the control accuracy of vehicle speed tracking, and the maximum error is reduced by 0.274 7 km/h.
Key words: unmanned vehicle; model predictive control; particle swarm optimization; longitudinal control
(责任编辑:黎 娅)
