预测函数控制在汽轮机控制系统中的运用
2021-12-31周军
周军
江苏杰瑞信息科技有限公司 江苏 连云港 222006
引言
蒸汽机的原动机为蒸汽,通过旋转发电机形成电能,可以向电力系统输出电力资源。汽轮机的驱动功率是电力系统的频率。近年来,用户对电力负荷质量的要求不断提高,对汽轮机控制系统的要求也相应提高。目前,DEH系统主要用于汽轮机控制系统,而DEH系统主要是利用常规PID控制模式,但是无法满足一些工作场合的工作要求。
在负载扰动作用下,传统的PID控制器不能同时满足快速性和稳定性的响应要求。本文分析了预测函数控制在汽轮机控制系统中应用,预测函数控制具有加快的计算速度,同时具有很强的扰动抑制能力和时滞补偿能力等,还可以实现在线整定工作,确保汽轮机负荷控制的快速性。
1 概述汽轮机控制系统
发电用汽轮机主要采用单机运行和并网运行的工作方式。在单机运行模式下,单位负荷是用户的功耗,无须分配负荷,机组转速直接关系到供电工作的效率,可以利用转速无差控制措施。在汽轮机并网运行阶段,所有机组的发电量为用户的总用电量。为了合理分配各机组的功率,不能采用无差调速控制方式。在并网运行阶段,汽轮机的稳态调速率不为零,稳态调速率直接关系到调节系统的静态特性[1]。
本文分析在汽轮机控制系统中引入预测函数控制,针对凝汽式汽轮机DEH控制系统设计PFC控制器,在负荷扰动过程中,可以使汽轮机DEH的响应速度因此提高,高效的控制汽轮机控制系统。
2 预测函数控制的基本原理
预测函数控制是一种模型预测控制方法。预测函数控制主要包括三个基本特性:预测模型、滚动优化和反馈校正。预测函数控制的关键问题是对输入结构的控制。输入值和设定值有一个基函数族。以下根据三个特征描述预测函数控制的基本原理:
2.1 预测模型
预测模型包括不同的类型,例如可以利用非参数模型和参数模型以及各种非线性模型、神经网络模型等。利用不同的模型,有利于进一步优化操作预测函数控制,提供参考知识,保障未来时刻被控对象输出变化符合预期标准[2]。
2.2 滚动优化
最优预测函数控制主要是利用有限时间内的滚动优化,在一定的采样时间内,在优化周期内同步推进。在不同的时间段,优化性能指标具有相同的相对形式,但绝对形式的时间域存在较大差异。因此,优化不是离线进行,而是需要在线反复运行,实现滚动优化。
2.3 反馈校正
滚动优化以反馈校正为基础,因此突出了滚动优化的优越性。反馈矫正形式具有多样化特征,可以利用预测模型预测未来的误差,并且提出补偿措施,通过在线辨识直接修正预测模型。使用任何修正形式,都应根据系统的实际基础进行预测函数控制,并在优化阶段准确预测系统的未来动态行为。因此,预测函数控制的优化不仅要结合模型,还要综合利用反馈信息,因此实现闭环优化目标。在预测函数控制过程中,可以利用设定值和对象性质以及干扰时间等因素,利用不同的预测方法[3]。
2.4 参考轨迹
预测函数控制和模型算法控制具有一致性,在实际控制阶段,逐步跟踪过程输出,避免参考,以避免控制量的剧烈变化或超调。
2.5 控制变量
预测函数控制模型输出包括无模型响应和模型强迫响应,自由响应是零输出响应,利用原来工作的控制量和输入量,和未来时刻控制量的关系比较小。而受迫响应是一种新型模型响应,预测函数控制控制信号线性组合了不同的已知基函数,需要根据对象性质和期望轨线要求选择基函数。因为可以离线计算基函数和响应的采样值,只需针对性线性加权系数采取在线参数优化措施,显著减少了预测函数控制的在线计算量[4]。
2 预测函数控制在汽轮机控制系统中的运用
预测函数控制是一种模型预测控制方法,这种控制算法主要是在预测控制中利用。预测函数控制的计算过程比较简单,同时具有较高的计算效率,可以在慢变系统中利用,同时也可以控制快变系统。预测函数控制利用预测模型预测未来时域中的对象输出,并利用参考轨迹滚动计算未来时域中的误差,从而最终确定当前时刻的最优可控输入,有效地控制被控对象。
2.1 基函数
系统未来输入量包括一系列函数的线性组合,这些函数属于基函数:
其中:n是基函数的个数,μJ是要求解的线组合参数,BJ(I)是此时基函数的值,T表示采样周期,P表示预测时域。本文对汽轮机控制系统的预测函数控制进行了分析,选择了阶跃函数为基函数,如n=1,B1(I)=1。此时,转换控制系统的控制问题是计算最优PFC参数μ1[5]。
2.2 预测模型
在汽轮机控制系统当中,被控对象主要包括油动机和蒸汽容以及转子,简化预测模型为一阶惯性加时滞环节。建设简化预测模型为:M(s)=KMe-Ls/(TMs+1)。TS代表采样周期,如果忽视时滞的影响,M(s)离散化模型为:yM(k)=amym(k-1)+(1-am)KMu(k-1)。控制输入u(k)=0,在未来k+P时刻,预测模型自由解为:yMR(k+P)=yM(k)aMP。假设在未来P步内,不改变控制输入,当yM(k)=0,在未来K+P时刻受迫解为:yM(k+P)=yMR(k+P)+yMF(k+P)。
2.3 误差校正
在实际工作中,如果存在输入干扰和噪声等方面的影响,将会增加预测模型输出和实际对象输出的误差。因此需要准确的预测未来时域的误差:e(k+P)=…e(k+1)=e(k)-ym(k)[6]。
2.4 参考轨迹
利用预测控制算法的过程中,主要是通过预测模型预测输出修正实际输出,并且根据参考轨迹收敛参考输入。利用多种形式的参考轨迹,例如可以利用查找法和解析函数等形式。利用字数函数可以实现在线计算,有效控制收敛速率,预测函数控制的参考轨迹主要是利用稳定系统一般一阶指数函数:yr(k+1)=r(k+i)-αri[r(k)-y(k)],i=1,2,…,P。其中yr表示参考轨迹,r表示参考输入,tr表示闭环系统的预期响应时间。在时间k,系统误差E(k)=R(k)-Y(k)。在K+P时,系统控制误差为e(K+P)=e(K)αrp。预期系统实际输出增量ΔP=e(K)-e(K+P)=e(K)(1-αrp)[7]。在K+P时,跟踪系统的实际输出与参考轨迹相结合,通过求解控制量ΔP=ΔM来驱动。可在线计算参考轨迹的误差值E(k)和当前时间ΔP。ΔM可以使用预测模型将自由溶液和强制溶液的线性组合组合起来:
ΔM=yMR(k+P)+yMF(k+P)-y(k)
由于预测模型中存在时滞,因此需要在控制量计算阶段综合时滞l的影响。在每个采样周期,需要计算预测模型的输出值,并通过传感器获得受控系统的实际输出值。通过计算,可以确定被控对象在当前时刻的控制量。
3 仿真研究
为了验证预测函数控制的控制性能,对于汽轮机控制系统实施MATLAB仿真验证,设置求解器为Ode4 Fixed Point类型,确定采样周期为0.02s。首先要确定汽轮机系统的参数,TS代表油动机时间常数,其数值为0.2s,TV代表蒸汽容积时间常数,其数值是0.025s,Tr代表转子时间常数,数值为8s,Cf代表转子摩擦系数,具体数值为0.2。根据被控对象构建等效模型:
M(s)=KM/TMS+1·e-LS=2.5/40s+1·e-0.125s。选择预测时域为10,结合参考轨迹指数设计预测函数控制控制器。为了说明预测函数控制控制器的工作效率,结合实际工程预测PID控制器和AMIGO方法整定PID控制器,并且对比分析采用的预测函数控制。在甩负荷阶段,下图代表转速动态。当模型发生失配问题,利用预测函数控制模式仍旧可以发挥出显著的控制性能。结合仿真结果可以确定,在甩负荷阶段,预测函数控制控制器具有良好的动态性能,发挥出预测函数控制的作用,可以控制瞬态调速率为5.6%,控制稳定时间为2s[8]。
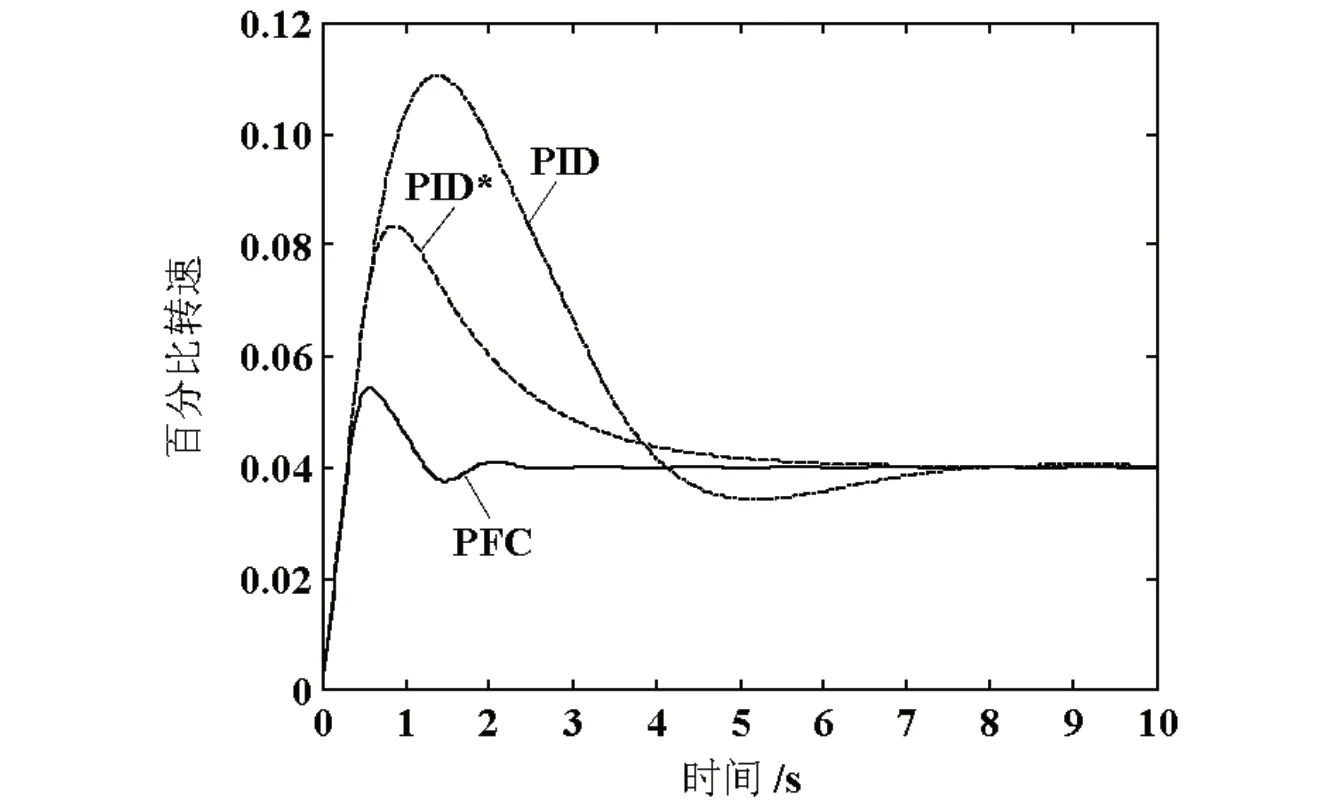
图1 突减100%负荷时转速曲线
4 结束语
本文分析预测函数控制在汽轮机控制系统中的运用,并且针对汽轮发电机开展仿真建模,利用预测函数控制控制器调节汽轮发电机。结合防震结果,预测函数控制具有较快的计算速度,计算过程非常简单,可以保障控制品质,具有很强的鲁棒性,如果负荷突然发生变化,转速稳定时间和超调量可以满足技术预设指标。在汽轮机实验中利用这种算法,确定仿真结果和试验结果是一致的,说明在蒸汽式汽轮机DEH控制系统中可以推广利用这种算法。