基于运动目标识别的摩托车视频监控驾考识别技术研究
2021-12-24韩伶俐
韩伶俐
(安徽三联学院 交通工程学院,合肥 211100)
0 引言
运动目标识别技术通常与视频监控技术联合使用,在智能交通管理、工业目标检测、区域安全防护等领域发挥积极作用[1].随着科学技术的发展车辆合格考试技术持续更新换代,摩托车驾考是车辆合格考试的重要内容之一,逐渐使用视频监控驾考取代人工考核,既可以提升驾考效率,又能提高考试标准与监控的精准度.运动目标识别一般是通过采集驾考目标的运动帧图像,基于图像处理算法、轮廓检测算法获得目标对象的动态轮廓信息,实现驾考对象的动态追踪.目前关于视频目标识别的应用算法研究颇多,例如:侯畅、董兰芳[2]提出一种基于深度编解码网络的运动目标检测算法,以离线样本数据为基础训练编解码网络,基于该网络学习背景信息同视频帧间的差异,利用背景建模和视频帧作为深度编解码网络的输入,输出结果即为视频中运动目标的识别结果;李大湘等[3]在目标识别研究中,首先构建运动轨迹能量优化模型,其次基于量子行为粒子群优化算法求解能量模型的最小解,重新组合运动轨迹后得到摘要视频,精准完成视频目标识别.本文综合考虑多种目标识别算法的利弊,决定利用边缘轮廓检测算法完成运动中摩托车目标图像特征检测,同时对检测技术进行多重优化与改进,最终在测试环节取得了良好的识别效果.
1 基于运动目标识别的摩托车视频监控驾考方案
1.1 摩托车驾考监控视频稳像技术
摩托车驾考视频监控对象是运动中的人物,视频中的图像称为“帧”,由于帧和帧之间产生变化导致画面信息产生差异,形成“运动”现象.在摩托车驾考监控视频采集过程中,由于曝光时间、运动幅度等因素常常导致视频图像序列不稳定[4],对后期识别监控视频中的目标造成较大难度与困扰.为此,在设计摩托车视频监控驾考方案时,增加了电子稳像技术,具体过程如下.
首先,以监控视频采集的原始摩托车帧图像为对象,基于改进ORB图像特征匹配算法选择其中具有不稳定属性的特征点,具体步骤如图1所示,提取两个长度一致字符串所在位置的差异性字符数量;在此过程中采用自适应角点检测与误匹配点剔除策略,获得精确的不平稳特征点生成特征点轨迹;紧接着完成初始特征轨迹的滤波处理,去除轨迹噪声[5].
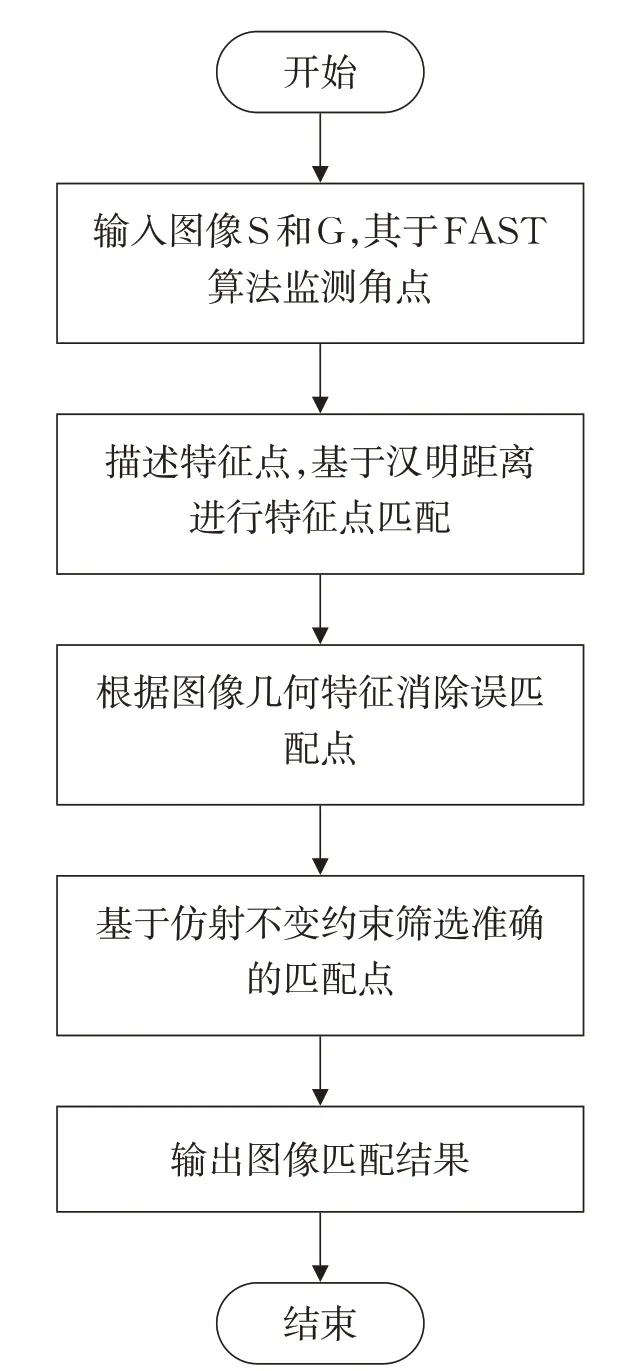
图1 改进ORB图像特征匹配算法步骤
其次,预测全局运动矢量轨迹,主要根据平滑点特征轨迹、初始特征点轨迹两个参量进行计算.全局运动矢量预测以6个参数为基准构建仿射模型,利用三个特征点即可获取放射变换的参数[6],该方式使算法运算的时间消耗少且精准度高.定义i为随机点特征轨迹,q表示其中任意特征点,输出滤波后的第q个特征点如式(1)所示.

然后,基于上述结果不平稳的帧图像以帧为单位进行运动矢量逆反补偿,参考张学典等[7]人的研究,基于双线性插值法完成亚像素部分的补偿.双线性插值法对于图像亚像素部分的补偿目的在于降低像素的块状与不平衡特征.将不平稳的帧图像划分为多个子区域,定义子区域的坐标为(xi,yi),灰度值为gi(xi,yi);在进行插值处理之前基于公式(2)恢复成不平稳帧图像子区域:

然后基于图2内容进行双线性插值完成亚像素部分的补偿.图1中的插值原理解释如下:在不平稳帧图像子区域内设置一个参考点,即区域的中心点;四个子区域的参考点分别表示为γ1、γ2、γ3、γ4,插值对象即为四个参考点内的像素点,图中a点表示待插值的不平稳像素点;然后参考点对相应区域进行映射,为区域内像素点生成新的像素值,完成亚像素部分的补偿.

图2 双线性插值原理分析
最后,利用图像信息熵统计增强图像、基于自动配准算法进行图像拼接再一次优化不平稳摩托车驾考视频的质量,利用图像信息熵统计增强图像的具体过程如下:
首先,求取帧图像子区域不同灰度级的信息熵,生成子区域信息熵统计直方图,公式(3)为第b级灰度信息熵的计算方法:

其中,子区域内灰度级数量用N表示;第b级像素的出现概率用ɛ(b)i表示.
然后,对不平稳帧图像的信息熵进行重新分割与分配,提高帧图像的平稳性.预估不同灰度级信息熵统计值,依照等级要求进行信息熵分配,分配信息熵的方法如式(4)所示:

式中,不同子区域分配到分割信息熵的灰度级数目用N1表示;E0表示原有信息熵值.当图像满足质量标准时输出,完成稳像处理.
1.2 基于边缘轮廓检测的运动目标识别算法
对基于图像稳像技术处理后的摩托车驾考监控帧图像,进行像素分流拟合如式(5)所示:

其中,图像像元值用V表示,邻域中灰度像素集用W表示;(x,y)∈Ω.
接下来基于单帧视觉差分析原理提取运动中摩托车目标图像特征,目标图像成像的平面信息素可以在单位成像像素值区域中确定[8],采用S(x,y;t)表示.且有其中,运动中摩托车目标图像动态特征点通过平移得到模型像素差值用Δv表示,灰度旋转不变矩特征量用σ表示.定义摩托车目标图像在梯度方向上的边缘信息如式(6)和式(7)所示:

顺着梯度方向划分上述公式中图像边缘幅度信息,得到2个分量.(m,n)处像素点灰度值采用Xmn表示.同时定义Xmax-Xmin、Ymax-Ymin、Zmax-Zmin分别表示运动中摩托车目标图像轮廓分布包围盒的长宽高,由此预测目标跟踪水平位移量,方法见公式(8):
其中,运动中摩托车目标图像边缘轮廓特征的单位方向矢量分别采用m、n表示.目标图像(m,n)处灰阶不变矩即通过Xmn表示,至此完成运动中摩托车目标图像边缘轮廓特征检测,进而实现摩托车目标识别与检测.
1.3 运动帧图像特征点匹配与重构
在上述过程中为了优化图像边缘轮廓特征检测精准度,对运动中的摩托车目标区域进行重构,具体通过极线约束模型实现对目标特征点的立体匹配与三维重构[9].图3描述了基于双目视觉的极线约束模型原理.f表示空间中的一点,r、r′分别表示摄像头,摄像机对应的光心描述为g和g′.在模型中,摄像机对f点进行透视变换将其映射至两个摄像头,基线负责连接摄像机光心,此时存在一个外极面由光心与点f共同组成,两侧图像与外极面于左极线l、右极线l′处相交.在上述布局中,空间中f点随机运动时,以透视变换的方式映射至左侧图像中心点r在极线l,同理,点r′在极线l′也一定成立,这种情况称为极线约束[10];并且极线约束原理中两侧的极点即为映射点同基线的相交点.
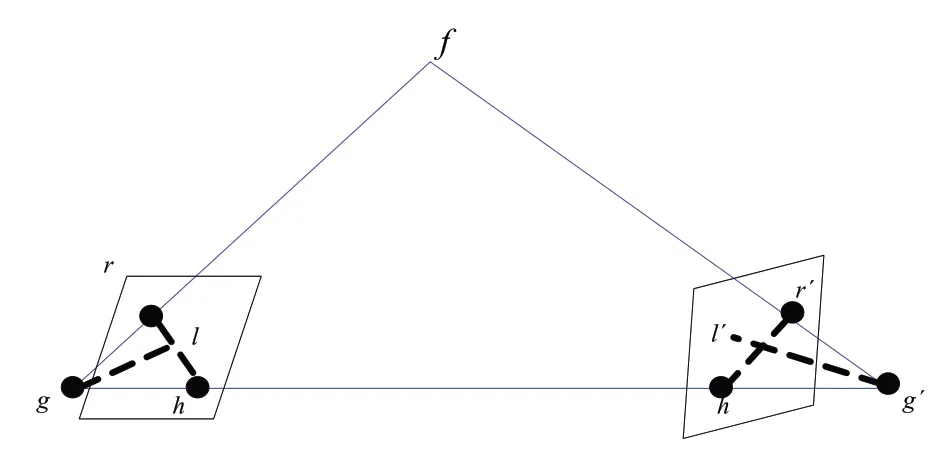
图3 基于双目视觉的极线约束模型
利用基于双目视觉的极线约束模型完成摩托车目标特征点的立体匹配与三维重构,降低了摩托车目标图像边缘轮廓特征检测的难度.
2 测试与分析
为了验证本文提出的基于运动目标识别的摩托车视频监控驾考方案的有效性,在驾校现场搭建摩托车驾考测试实验场所进行目标检测仿真测试,利用本文方法对考试人员进行动态识别与检测,提高摩托车驾考监控的效率.实验使用算法采用MATLAB进行开发设计,图像处理主机操作系统为Windows 7,内存为8 GB,处理器为Intel Core i7,CPU主频2.5 GHz.利用本文方法检测摩托车驾考目标的效果如图4所示,可以看出,本文方法能够将背景信息与目标对象清晰分割,完整提取出驾考人员与摩托车的轮廓信息.为了进一步分析本文方法在驾考视频监控中的性能,引入基于高斯混合模型的驾考监控识别方法、基于SIFT特征匹配的驾考监控识别方法进一步展开对比测试.

图4 本文方法目标轮廓检测结果
2.1 目标轮廓检测效果分析
现场采集5组摩托车驾考帧图像,为各组图像设置不同的信噪比水平,记录了不同信噪比程度下各方法进行驾考目标识别的效果,如图5所示.
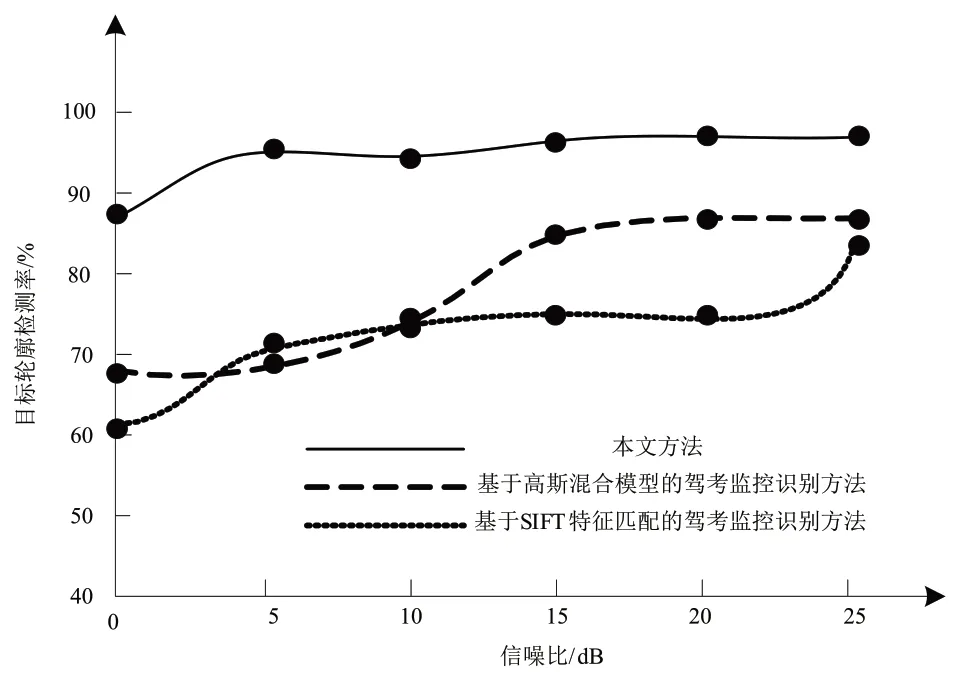
图5 各方法目标轮廓检测率统计
图5数据显示,三种方法检测率均随着图像信噪比的增加逐渐上升,说明图像的原始质量对于目标轮廓检测效果的影响较大,且图像信噪比与目标轮廓检测率成正比.可以清晰看出本文方法检测摩托车驾考目标对象轮廓的准确率显著高于另外两种方法,当图像信噪比位于[15 dB,25 dB]区间时,检测率可达96%~97%.此外,检测摩托车目标轮廓过程中,在图像信噪比一致的前提下本文方法初始检测率领先,检测结果总体波动平稳、波动较小,说明该方法受图像信噪比的干扰相对较小,具有一定的抗噪性.
2.2 不同驾考监控方案的性能对比
为突出摩托车视频监控驾考方案的性能优势,以均方根误差、响应时间作为测试指标,评估三种方法进行驾考监控识别的性能,结果如表1所示.

表1 三种方法实施摩托车驾考监控识别的性能
表1中均方根误差为归一化值,数值越大表明其监控误差越大.本文方法的均方根误差为0.0547,仅约为基于SIFT特征匹配的驾考监控识别方法的十分之一,获得了较优的目标追踪识别效果;基于高斯混合模型的驾考监控识别方法高达0.2954,识别效果不理想.此外,本文方法的响应时间为2.11 s,实时性较好,可以满足摩托车视频监控驾考识别的需求,相比之下,基于高斯混合模型的驾考监控识别方法、基于SIFT特征匹配的驾考监控识别方法响应的时间较长,实时性相对较弱.
3 结论
本文以摩托车驾考视频监控问题作为研究对象,提出了基于运动目标识别的驾考目标检测方案.在检测摩托车驾考目标之前对图像进行稳像处理,提高图像目标轮廓检测的精准度;具体而言,本文方法在图像采集原始阶段对图像进行了稳像处理,基于改进ORB图像特征匹配算法选择图像中不稳定特征点,对不平稳帧图像进行运动矢量逆反补偿,最后通过增强、配准等方法完成图像拼接,输出高质量的图像作为目标检测的基础;同时基于双目视觉极线约束模型对目标特征点进行立体匹配与三维重构,再次优化摩托车目标检测效果.以上两种优化策略均为提高摩托车视频监控驾考方案提供了可靠性保障.
根据实验结果得知,本文方法检测率可达96%~97%,虽取得了理想的检测效果但仍然需要进一步优化,以适应高标准的摩托车驾考需求.可考虑在双目视觉的极线约束模型上进行改进,更加精准地完成摩托车目标特征点的立体匹配与三维重构,进而优化视频目标检测率.
