基于深度学习和光场成像的火焰三维温度场重建算法
2021-12-23韩哲哲许传龙
张 杰 齐 琪 韩哲哲 李 健 张 彪 许传龙
(东南大学能源与环境学院, 南京 210096)
燃烧广泛存在于燃气轮机、内燃机、电站锅炉、航空发动机和火箭发动机等[1]工作过程中.而火焰测温技术有助于了解燃烧火焰温度分布规律,通过探索物理作用过程和化学反应机理,可评估燃烧效率,进而可对燃烧装置进行评价和改进[2].
辐射图像法是利用图像探测器探测的火焰辐射信息进行火焰温度场测量,其优点是非侵入式且不需要外加激励源,能够适应复杂恶劣的工业环境[3].传统相机拍摄的图像是火焰在三维空间中某一视角下的投影,通常需要多台相机拍摄的不同视角下的火焰图像进行火焰三维温度场重建[3].光场相机利用微透镜阵列将通过主透镜聚焦于该微透镜上的像点的不同方向辐射强度信息分离出来,并分别记录在微透镜后面所覆盖的CCD探测器的像元上,从而实现四维光场信息的采集,能够获得更加丰富的火焰辐射信息,利用单台光场相机实现了火焰三维温度场的重建[4].基于光场成像的火焰三维温度场重建问题可转化为线性方程组的求解问题,常用的火焰三维温度场重建方法有截断奇异值分解算法[5](TSVD)、最小二乘QR分解算法[6](LSQR)、非负最小二乘算法(NNLS)[3]等.采用这些算法重建火焰三维温度场时都需要经历火焰辐射光线追迹过程,以建立辐射传递方程.对于数以万计根光线的追迹过程所消耗的时间占据了温度场重建过程的绝大部分时间,且与追迹的光线总数以及火焰的网格划分数量密切相关.追迹的光线数与光场图像的有效像素总数相同,而随着火焰网格划分数量的增加,光线追迹所需时间呈指数倍增加.孙俊等[3,7]采用NNLS算法重建了微元体划分为10×10×1(轴向、径向、圆周角)的火焰,重建时间为21.12 s.黄兴等[8]采用LSQR算法重建在轴向高度、半径和圆周角网格划分为10×10×1的模拟火焰时,在1%测量误差情况下的重建时间为23.13 s.当对于火焰温度场的空间分辨率要求提高时,上述2个例子中的重建时间也会呈指数倍增加,这使得实时测量以及工程应用受到极大限制.
近年来,深度学习算法因其强大的非线性函数逼近能力,被广泛应用在计算机视觉、图像识别等领域[9].其中,卷积神经网络(CNN)已被证明能够挖掘数据的本质特征,并已成功应用于医学影像学[10],如电子计算机断层扫描(CT)[11].Chen等[12]提出了一种新的低剂量CT深度学习降噪方法,该方法在定量指标和计算速度上有了很大的提高.此外,深度学习算法在燃烧诊断领域的研究也取得了显著的成果.Jin等[13]提出一种基于CNN模型的三维快速火焰化学发光层析成像系统,用于实际燃烧测量,将重建时间从ART算法的170.25 s缩短为1.28 s.Huang等[14-15]将卷积神经网络和本征正交分解结合,加速了火焰三维结构的重构过程,同时还将长短时记忆网络与CNN耦合,实现了三维火焰轮廓的在线预测.另外,深度学习还被用于预测燃烧过程中的热释放率[16-17]、NOx排放浓度[18]、氧含量[19].深度学习在各领域的成功应用一方面是计算机技术的快速发展,另一方面则是神经网络结构和超参数的合理设置和选择.合适的训练方式和网络参数直接影响网络的泛化能力,也有助于加快网络收敛速度,抑制过拟合[20].
针对传统的光场成像火焰温度重建计算量大、效率低等问题,本文提出一种基于CNN的火焰三维温度场重建方法.利用视在光线法建立了含有不同温度场的单峰火焰和双峰火焰数据集;构建了用于火焰三维温度场重建的卷积神经网络,并用单峰火焰数据集对CNN进行训练,将训练结果用于单峰火焰三维温度场的重建,并与传统重建方法进行性能比较与分析;最后,将CNN应用于双峰火焰数据集的训练和预测,检验了该网络在复杂火焰温度场中的重建性能.
1 基于光场成像和深度学习的火焰 温度场重建
1.1 光场成像原理
光场成像技术的基本原理是利用安装在主透镜和图像探测器之间的微透镜阵列将物体发出的不同方向的光线投射到图像探测器不同位置的像素上,形成光场图像.物面关于主透镜成像系统有一个共轭像面,由于没有成像探测器记录这一像,称为虚拟像面[3].虚拟像面作为微透镜阵列成像的物面,与CCD关于微透镜阵列共轭.图1为光场成像示意图,像面与主透镜之间的距离记为Lom,主透镜与微透镜阵列之间的距离记为Lmm,微透镜阵列与图像探测器、虚拟像面之间的距离分别记为Lmp、Lmv.物点发出的一束光线,经过主透镜汇聚到虚拟像面对应的虚拟像点上,该束光线再经微透镜投射到不同的像素上.
数值模拟中采用的光场相机参数如下:主透镜焦距为50 mm,微透镜焦距为600 μm,微透镜阵列与CCD距离为480 μm,主透镜与微透镜距离为53.1 mm,物距为505 mm,主透镜直径为10.7 mm,微透镜直径为0.095 mm,每个像素的尺寸为8 μm×8 μm.
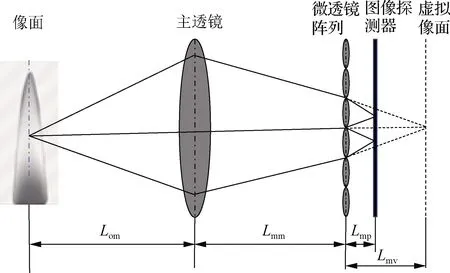
图1 光场成像示意图
1.2 基于CNN的火焰三维温度场重建
卷积神经网络在局部感知、共享权值等方面具有优越的性能[21-22],同时具有减少网络参数和提升特征提取能力的优点.用于火焰三维温度场重建的CNN模型包括数据集构建阶段、网络训练阶段和网络测试阶段.在数据集构建阶段,需要设定不同的三维温度场,通过正向计算[3]得到对应的光场图像.在训练阶段,通过数值模拟得到的数据集被投入到CNN网络中,通过对CNN模型的权值参数进行优化,确定CNN的结构.结构确定后,即可在测试阶段通过CNN模型重建火焰三维温度场,同时采用传统NNLS算法重建温度场,将采用CNN重建的温度场与传统NNLS算法重建的温度场进行比较,评价CNN的性能.
2 数据集构建
本文设置了2种火焰的数据集,分别为单峰火焰和双峰火焰.单峰火焰数据集用于确定网络结构,检验基于CNN重建算法的重建效率以及重建精度.双峰火焰具有非轴对称特性,因此构建了双峰火焰数据集,用于检验CNN算法重建非轴对称火焰温度场的能力.
2.1 单峰火焰数据集
在构建单峰火焰数据集过程中,采用的温度场分布如下:
T(Z,R,f,v)=
(1)
式中,z、r分别为温度点轴向、径向坐标;Z表示模拟火焰的高度,设置为0.03 m;R表示模拟火焰的半径,为0.008 m;f和v为2个可调系数,可获得不同的温度场.其中,f的取值范围设置为0.9~1.1,间隔为0.001;v的取值范围为0.8~1.0,间隔为0.01.火焰的网格划分为10×8×15,分别表示轴向、径向和周向.通过式(1)共得到了4 000组不同的温度场,正向计算得到对应的4 000张光场图像,其中3 500组作为训练集,500组作为测试集.单峰火焰数据集构建部分结果如图2所示.

(a) 温度场(f=0.9,v=0.8)

(b) 光场图像(f=0.9,v=0.8)
(c) 温度场(f=1.0,v=1.0)
2.2 双峰火焰数据集
双峰火焰数据集温度场如下:
T(X,Y,Z,f)=
(2)
其中,f为可变参数,取值范围为0.9~1.1,间隔为5×10-5.火焰网格划分与单峰火焰一致.通过改变参数f一共得到3 000组不同温度场,通过正向计算得出3 000张光场图像,其中2 700组作为训练集,300组作为测试集.光场图像-双峰火焰温度场数据集部分如图3所示.
3 CNN网络模型构建及参数选择
3.1 CNN网络模型构建
卷积神经网络由输入层、隐层和输出层构成,其中隐层包含卷积层、池化层、全连接层等.CNN一般用于图像特征提取,输入为表示灰度或者彩色图像的矩阵,本文中为200×300的光场图像.网络前半部分一般为交替设置的卷积层和池化层,从而组成特征提取器不断降低特征维度,以从中提取不同层次特征,后半部分通常设置全连接层进行分类或回归展示网络处理结果.通常图像处理问题越复杂,网络模型则需要学习更多的参数来解决复杂的图像处理问题,通过设置更深的网络层可以学到更多的网络参数.本文中设计的网络一共有13层,网络结构如图4所示,包括输入层、隐层和输出层,其中隐层一共包含11层,由5层卷积层、5层池化层和1层全连接层组成,每层的尺寸已标注在图中,未进一步加深网络层数是为了保证输入图像的大小要大于卷积核的大小.只设计1层全连接层是因为当全连接层的数目增加时,网络参数会增加,训练时间会加长,同时根据训练集对网络的训练结果,当全连接层设置为2层时,重建精度相比1层时也有所下降.

(a) 温度场(f=0.9)

(b) 光场图像(f=0.9)

(c) 温度场(f=1.0)

(d) 光场图像(f=1.0)

图4 网络结构图
卷积神经网络中,上层节点的输出和下层节点的输入之间存在激活函数.激活函数的主要作用是提供网络的非线性建模能力,如果没有激活函数,那么该网络仅能够表达线性映射,此时即便有再多的隐藏层,其整个网络与单层神经网络也是等价的.非线性激活函数(ReLU函数)能够显著提高卷积网络的性能,且ReLU函数能避免模型训练过程中梯度消失[23]问题,ReLU函数表达式如下:
f(x)=max(0,x)
(3)
式中,x表示上层节点的输出值,即当输入大于0时,输出与输入相同,否则输出为0.
卷积神经网络训练的目的是使损失函数减小,损失函数越小,说明预测值越接近真实值.本文采用的损失函数是均方误差函数(MSE),定义如下:
(4)

3.2 网络参数优化算法选择
网络参数优化器是网络模型编译时必要的参数,其主要作用是在网络训练时优化网络参数,从而得到最优的网络模型.优化算法种类很多,如自适应梯度算法(AdaGrad)、均方根传播(RMSProp)以及Adam算法等.AdaGrad为每一个参数保留一个学习率以提升在稀疏梯度上的性能,RMSProp基于权重梯度最近量级的均值为每一个参数适应性地保留学习率,Adam算法是通过计算梯度的一阶矩估计和二阶矩估计为不同的参数设计独立的自适应性学习率.为了评价卷积神经网络的性能,本文采用最大相对误差(Emax)和平均相对误差(Emean)两种评价指标:
(5)
(6)
表1展示了基于单峰火焰数据集3种参数优化算法对于网络性能的影响.由表可以看出,3种优化算法中,Adam算法的均方误差、最大相对误差以及平均相对误差最小,分别为5.8 K2、0.5%和0.14%;RMSProp算法均方误差、最大相对误差以及平均相对误差都最大,分别为273.0 K2、3.2%和1.67%.因此,Adam算法的效果最好,RMSProp算法性能最差,本文采用Adam算法作为卷积神经网络参数的优化算法.
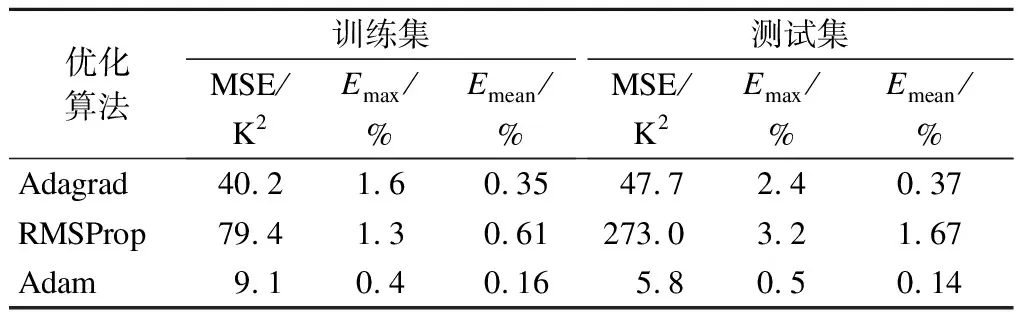
表1 基于单峰火焰数据集不同优化算法对网络性能的影响
4 网络性能评价
本文中卷积神经网络是基于Keras(版本2.3.1,采用TensorFlow(版本2.1.0)作为后端)搭建、训练以及测试.所有计算都是在服务器上运行,服务器配备CPU型号为Intel(R)Core(TM)i9-9900 K CPU,显卡型号为NVIDIA GeForce RTX 2080 SUPER.
4.1 单峰火焰温度场重建效率及精度
采用CNN算法与传统算法对火焰三维温度场进行了重建,图5为火焰的原始温度场和重建结果.从图可以看出,NNLS算法重建得出的温度场与原始温度场在周向上存在畸变;而CNN算法重建得出的温度场与原始温度场吻合度较高.NNLS算法重建结果平均相对误差为1.22%;而CNN算法重建结果平均误差为0.14%,重建精度较高.由图6可以看出,由CNN算法重建出的温度场与原始温度场在各个网格上的相对误差总体上要比由NNLS算法重建的误差小.采用单峰火焰数据集对所搭建网络进行训练,训练时间为266 min,单峰火焰温度场的重建时间为830 μs;而采用传统的NNLS重建同样网格划分为10×8×15的火焰三维温度场所需的时间为4 759 s.因此,本文所提出的深度学习算法重建火焰三维温度场相较于传统算法在重建时间上有了很大幅度的缩短,可以用于实时重建.

(a) 原始温度场

(b) NNLS算法重建结果

(c) CNN算法重建结果
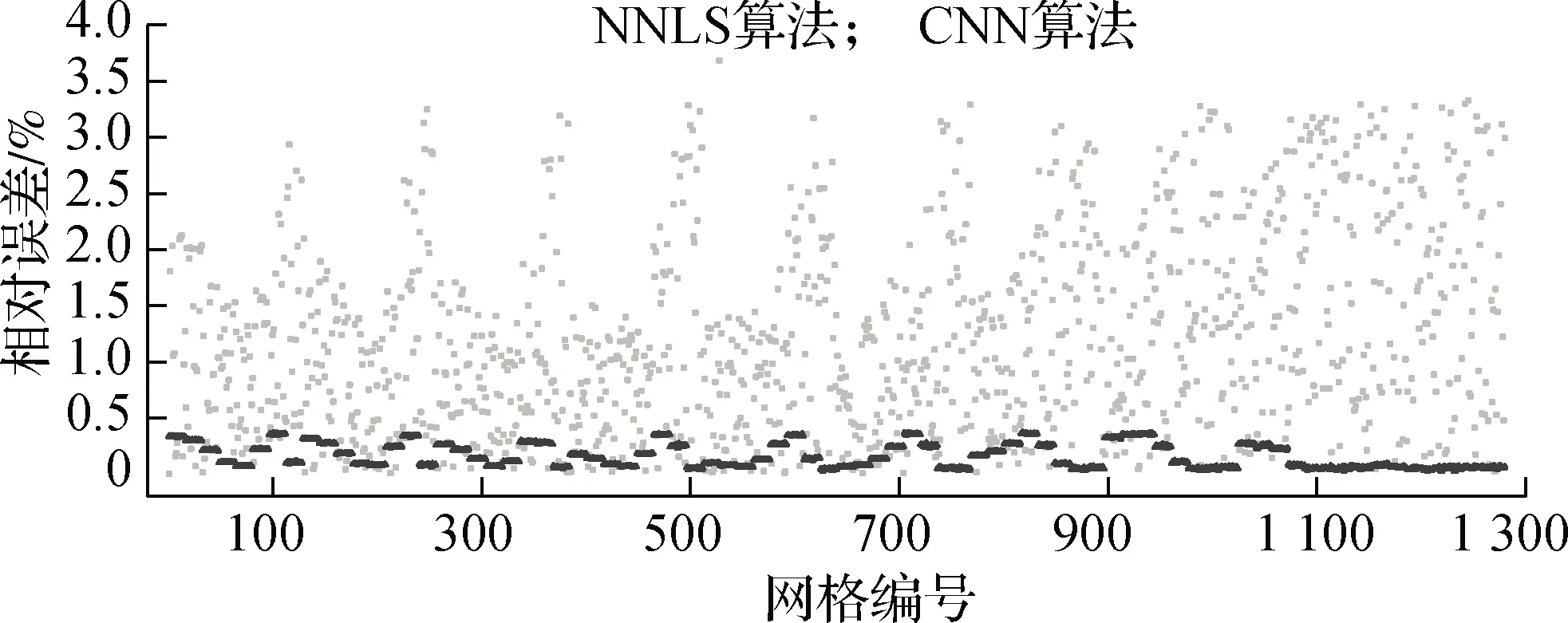
图6 重建结果误差图
4.2 深度神经网络模型的抗噪性能分析
向测试数据加入了均值μ=0、不同标准差(σ)的高斯白噪声,以测试卷积神经网络算法的抗噪能力.标准差从0.01增长到0.15,间隔为0.01.加入标准差为0.1的高斯白噪声后的光场图像如图7所示,加入噪声后的光场图像上多出许多噪点.
(a) 未添加噪声

(b) 添加σ=0.1噪声
为了得到抗噪性能更好、泛化能力强的卷积神经网络,本文研究了图像数据归一化对于网络抗噪性能的影响.归一化对于卷积神经网络抗噪性能影响的结果如图8所示.可以看到,有无归一化在无噪声,即标准差为0时对于重建精度没有影响,最大相对误差都为0.5%;但当加入高斯噪声的标准差大于0.07时,随着噪声标准差的增大,有无数据归一化的重建误差都在增加,但有归一化的重建误差较无归一化的重建误差增长缓慢.加入噪声标准差σ=0.15时,无归一化的重建最大相对误差为28.5%,有归一化的重建最大相对误差为7.3%,可见对网络输入图像进行数据归一化处理有利于提升卷积神经网络算法的抗噪性能.

图8 图像数据归一化对于网络抗噪性能的影响
在经过图像归一化处理之后,不同标准差高斯噪声下卷积神经网络重建结果误差图如图9所示.可以看出,随着高斯噪声的增加,平均相对误差和最大相对误差都在上升.最大相对误差在σ=0.15时仅为7.3%,此时的平均相对误差仅为1.3%,表明深度学习算法对噪声的抗干扰能力较强,具有良好的泛化能力.

图9 不同标准差高斯噪声下的重建误差图
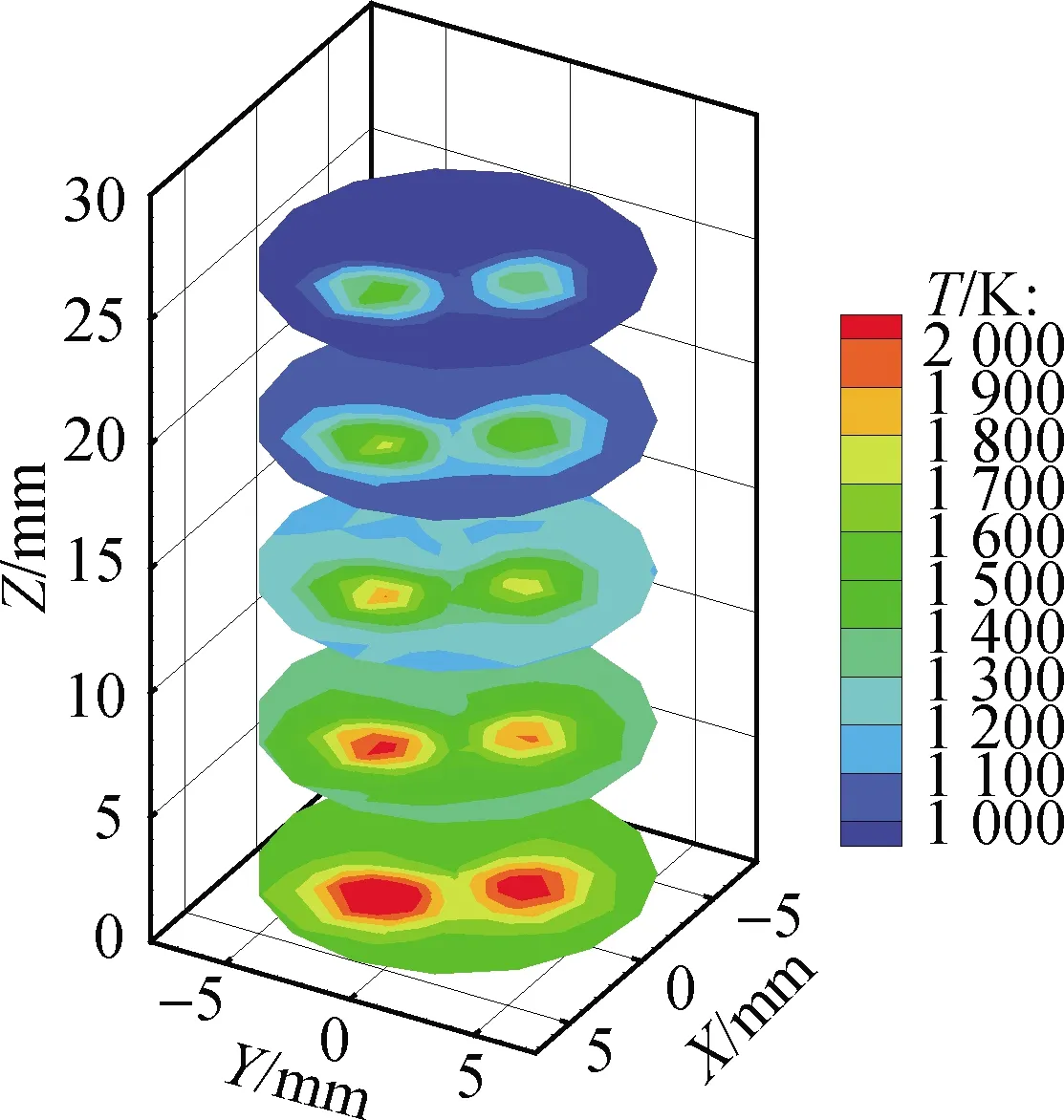
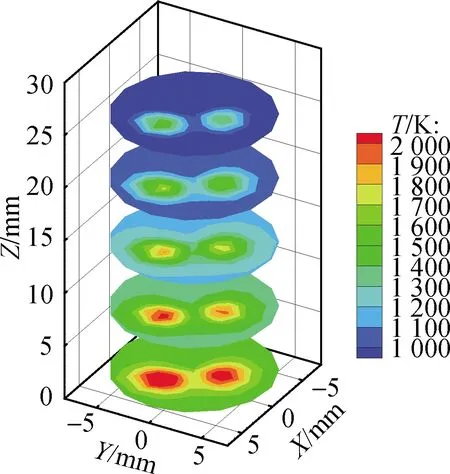
4.3 双峰火焰温度场重建性能对比
为了验证CNN算法能否适用于更加复杂的火焰温度场重建,采用双峰火焰数据集对上述网络进行训练,训练时间为78 min,单个双峰火焰温度场重建时间为1 ms,而采用NNLS算法重建相同双峰火焰所需的时间为3 042 s,因此对于双峰火焰温度场重建,CNN算法相比于传统NNLS算法在重建效率上仍然具有很大优势.NNLS算法和CNN算法对于双峰火焰温度场重建结果如图10所示.CNN算法重建结果的最大相对误差为1.81%,平均相对误差为0.52%,而传统NNLS算法重建结果的最大相对误差为3.71%,平均相对误差为1.19%.可见相比传统NNLS算法,CNN算法在重建较复杂火焰温度场时仍具有良好的实用性.

(a) 原始温度场
(b) NNLS算法重建结果
(c) CNN算法重建结果
5 结论
1) 相比于传统NNLS算法,CNN算法在网格划分为10×8×15条件下使得单峰火焰温度场的重建时间从4 759 s缩短为830 μs,同时平均相对误差仅为0.14%,表明CNN算法可大幅度减小重建时间,实现了火焰温度场实时重建,并具有较高的重建准确度.
2) 不同标准差大小的高斯噪声试验证明了基于卷积神经网络重建算法具有良好的抗噪性能,光场数据归一化处理也有助于提高模型的抗噪声能力.
3) 双峰火焰重建结果最大相对误差为1.81%,平均相对误差为0.52%,表明CNN算法不仅适用于轴对称火焰,对于非轴对称双峰火焰也具有较高的重建精度.
