Stability analysis of multiple-lattice self-anticipative density integration effect based on lattice hydrodynamic model in V2V environment∗
2021-12-22GengZhang张埂andDaDongTian田大东
Geng Zhang(张埂) and Da-Dong Tian(田大东)
1College of Computer and Information Science,Southwest University,Chongqing 400715,China
2College of Information Science and Engineering,Shandong Agricultural University,Tai’an 271018,China
Keywords: lattice hydrodynamic model,traffic stability,self-anticipative density integration,mKdV equation
1. Introduction
Lots of traffic problems are caused by the contradiction between the finite road resource and the increasing demand for traffic construction in our daily life. In order to reduce traffic problem,we need to find out the origin of traffic problem and the operation rule of the traffic system. A natural way of describing the road traffic is the micro traffic modeling, which mainly describes a single vehicle’s motion process and its influence factors. Another way is the macro traffic modeling,which primarily depicts the road traffic as compressible fluid,and then the traffic characteristics are studied according to traffic wave theory.
In 1995, on the assumption that the following vehicle’s motion depends mainly on the headway between the considered vehicle and its preceding vehicle, Bandoet al.[1]constructed an optimal velocity function and proposed a famous optimal velocity car-following model. Then, Nagatani[2]introduced the idea of the optimal velocity car-following model into the macro traffic modeling and proposed the lattice hydrodynamic model. Since then, lots of modified traffic models have been constructed to reveal the influence of different traffic factors on traffic flow.[3–15]For example,Donget al.[3]constructed a hybrid traffic flow model at an off-ramp bottleneck by considering the adaptive cruise control vehicles and cooperative adaptive cruise control vehicles. Peng[4]investigated the effect of traffic interruption probability on traffic flow based on a new optimal velocity car-following model by considering the driver’s anticipation effect of traffic interruption probability.Chen and Zhang[5]proposed a traffic flow dynamics model and studied the physical phenomenon of highspeed car following behavior. Jinet al.[6]explored the nonlinear density wave and energy consumption for a curved road by taking the friction coefficient and the road curvature into account. Guptaet al.[7]analyzed the traffic evolution properties of a lattice traffic flow model on a gradient highway. Ge and Cheng[11]introduced an improved lattice hydrodynamic model considering the effect of “backward looking”. Tianet al.[12]extended the original lattice hydrodynamic model by considering the density difference effect. Wanget al.[15]studied the traffic flow evolution rule for two-lane traffic system by introducing a modified two-lane lattice hydrodynamic model.
Recently,in order to improve the stability of traffic flow,the lattice hydrodynamic modeling on the basis of control theory was studied. In 2015, Geet al.[16]applied the delayedfeedback control method to the lattice hydrodynamic model proposed by Nagatani.[2]Liet al.[17]and Qinet al.[18]respectively studied the effects of density change rate and flux change rate on traffic flow by the Laplace transform method.Liuet al.[19]studied the lattice hydrodynamic model-based traffic control from the perspective of transportation cyberphysical system approach. Panet al.[20]introduced a delayindependent traffic flux control method into a discrete-time lattice hydrodynamic model with time-delay. It is revealed that the controlled traffic system can run much more steadily.
In fact, the driving process is continuous in real traffic.The influence of some continuous traffic information on traffic flow has also been studied. In 2018,Zhaoet al.[21]presented a new lattice hydrodynamic model by introducing the continuous historical current integration information into macro traffic modeling. Later,Heet al.[22]uncovered the effect of density integration on the stability of a new lattice hydrodynamic model. In addition, the influences of continuous traffic flux and density information on traffic flow have been studied by Wanget al.[23]and Qiet al.[24]Besides the relative continuous traffic information of two successive lattices,Liuet al.[25]investigated the stabilization effect of self-delayed flux integral for the two-lane lattice hydrodynamic model. But the continuous traffic information considered in the above models are delayed traffic information. In 2017, Zhanget al.[26]presented a new lattice hydrodynamic model in which the lattice selfanticipative density effect is considered,and they also attested to the stabilization effect of lattice self-anticipative density on traffic flow.
However, the lattice self-anticipative density effect in Ref.[26]was proposed for a single lattice at a fixed time. In fact,the development of intelligent transportation system and the vehicle-to-vehicle(V2V)communication technology show that the considered vehicle movement is adjusted not only by the nearby traffic information,but also by the information obtained from far preceding vehicles. So, it is more reasonable to study the traffic evolution property with consideration of multiple anticipative traffic information acquired in a continuous time interval in the V2V environment. But little work on the effect of multiple-lattice self-anticipative information on the traffic flow from the viewpoint of V2V communication environment was done. Therefore,in this paper,a new lattice hydrodynamic model is proposed by considering the multiplepreceding-lattice continuous self-anticipative density information, and the new model’s stability condition and the density wave propagation rules are discussed as well.
The rest of this paper is organized as follows. In Section 2, the new model is presented. In Section 3 the new model’s linear and nonlinear properties are analyzed. The numerical simulation is presented in Section 4,and some conclusions are drawn in Section 5.
2. New model
The lattice hydrodynamic model proposed by Nagatani[2]in 1998 is given by the following equations:

whereρjandvjare the density and velocity of latticejat timetrespectively,ρ0is the average density,adenotes driver’s sensitivity, andVrepresents the optimal velocity function. A widely used expression of the optimal velocity function is given by

wherevmaxis the maximal velocity andρcis the critical density.
The lattice hydrodynamic model has been widely extended since it was proposed.Among the extended researches,an important model is constructed by taking the relative density difference information into account and the governing equation of this model is[12]

whereλis a coefficient andρj −ρj+1is the relative density difference between latticesjandj+1.
In the above model,the density difference information is mainly from two successive lattices. Recently,Zhanget al.[26]considered the influence of driver’s self-anticipative density information on traffic stability and presented the following model:

whereτ0is the anticipative time,ρj+1−ρj+1(t+τ0)denotes the self-anticipative density difference of latticej+1,andkis the reaction coefficient.
The self-anticipative density information in Zhang’s model is set to be at a fixed time. But in real traffic situation,the road traffic motion process is a continuous process. So,it is more reasonable to study the continuous anticipative traffic information on traffic flow. On the other hand, in the V2V environment, multiple-preceding-vehicles traffic information can be obtained and used for the considered vehicle to adjust its motion behavior. In view of these reasons,a new lattice hydrodynamic model by considering the effect of multiple-lattice self-anticipative density integration is presented as
wheremis the number of preceding lattices andγis the reaction coefficient.The integration of the self-anticipative density means that the density information is continuous.
By linearizing the self-anticipative density termρj+p(t+s)fort,it follows that

Then,equation(9)can be simplified in terms of Eq.(10)into the following formula:

Further,by substituting Eq.(11)into Eq.(8),one has

3. Theoretical analysis
3.1. Linear stability analysis
Linear stability analysis of the new model is implemented in this subsection. The analysis is carried out for a ring road.It is supposed that the traffic flow is stable when the road traffic density of every lattice is the average densityρ0and every vehicle on the ring road moves at the same optimal velocityV(ρ0),so the stable solution of traffic flow is

The linear stability depends on the value ofz2in view of long-wavelength mode. The traffic flow is stable whenz2>0,but becomes unstable whenz2<0. So,the stable condition is

From Eq.(21), we can draw the neutral stability lines in the density–sensitivity space for different values ofmand the result is shown in Fig.1.

Fig.1. Neutral stability lines in the density–sensitive space.
In Fig.1,the neutral stability lines are derived form=1,2,and 3 whent0=0.4,γ=1,vmax=2,ρ0=ρc=0.25. Also,we consider the case whenγ=0, which is corresponding to the situation where no lattice self-anticipative density integration effect is considered. It is clear from Eq.(21)that the region above each neutral stability line is the stable region,and the region below each neutral stability line is the unstable region in Fig. 1. Also, it is observed that the neutral stability line forγ=0 is higher than that forγ/=0. Moreover, the neutral stability lines go down gradually whenγ/=0 andmincreases from 1 to 3. This reveals that the unstable traffic region can be reduced by considering lattice self-anticipative density integration effect,and the unstable traffic region can be further shrunk if more-preceding-lattice self-anticipative density integration effect is considered. In other words, the lattice self-anticipative density integration effect can improve the stability of traffic flow,and the stabilization effect is more obvious when more-preceding-lattice information is taken into account.
3.2. Nonlinear analysis
In view of the linear stability analysis result, it is clearly shown that the density–sensitive space is divided into the stable region and the unstable region. Theoretically, the traffic flow in the stable region is resistive to a small outside disturbance,but it in the unstable region will evolve into traffic congestion under a small outside disturbance. To show the form and propagation rule of the density wave in the unstable region,a long-wavelength expansion is used for the new model in the unstable region near the critical point (ρc,ac). For the space variablejand time variablet,ε(0<ε ≪1)is the slow scale,the slow variablesXandTare defined as


Equation (27) is the standard modified Korteweg–de-Vries (mKdV) equation with anO(ε) correction term. If we ignore theO(ε) term, equation (27) is reduced to the mKdV equation with a kink–antikink solution as

4. Numerical simulation
Numerical simulation of the new model is carried out to reveal the influence of multiple-lattice self-anticipative density integration effect on the evolution process of traffic flow.The simulation is conducted under periodic boundary condition. For convenience of simulation, we rewrite Eq.(13)into the following difference equation:


The other simulation parameters are selected asN= 100,a=1.7,vmax=2,ρ0=ρc=0.25, andτ0=0.4. The simulation results are shown in Figs.2–8.
Figure 2 shows the space–time density wave evolution patterns of the new model whenγ= 0, indicating that no preceding-lattice self-anticipative density integration information is considered. Specifically, figure 2(a)shows the density wave in the initialt=500 time steps, and figure 2(b)reveals the density wave aftert=500 time steps. From Fig.2,it can be seen that the initial disturbed stable traffic flow will evolve into traffic density wave and the oscillation of the density wave becomes more and more serious. Also,the final unstable traffic density wave takes on traffic density wave of high density region and that of low density region alternately. This density form can be described by the kink–antikink solution of the mKdV equation.
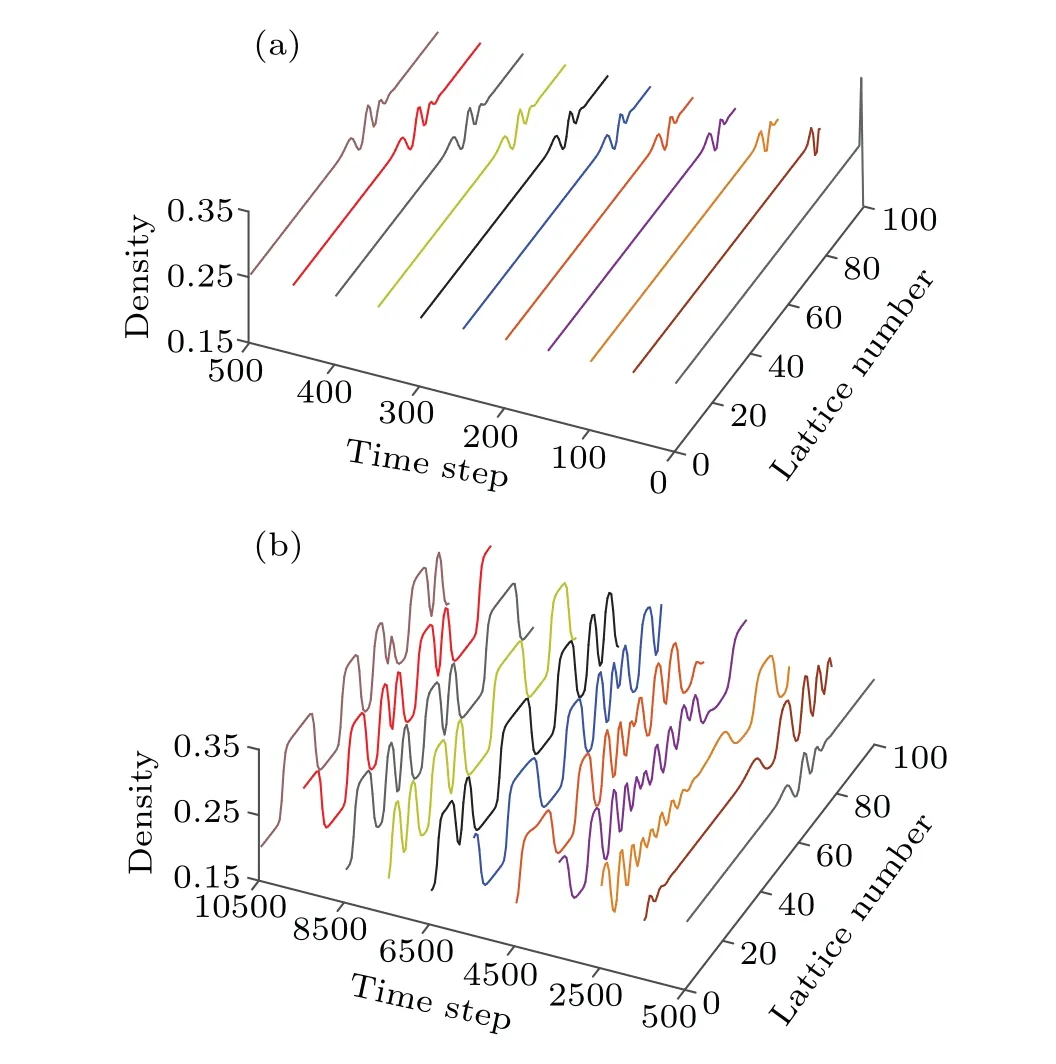
Fig.2. Spatiotemporal evolution patterns of density wave when γ =0.
Similarly,figures 3–5 describe the density evolution patterns of the new model obtained whenγ= 1, andm= 1,2, and 3 respectively. In Fig. 3, we find out that the initial stable traffic flow still becomes unstable under a disturbance, but the vibration level of the density wave is smaller than that in Fig. 2. It shows that the single-preceding-lattice self-anticipative density integration information can reduce the unstable level of traffic congestion. Furthermore, when twopreceding-lattice self-anticipative density integration effect is taken into account,we can see from Fig.4 that the severity of traffic congestion has been lowered ulteriorly in comparison with Figs.2 and 3. Finally,when three-preceding-lattice selfanticipative density integration effect is considered, it can be seen from Fig. 5 that the perturbation disappears in the traffic flow evolution process and the traffic flow recovers to the initial stable state. So,it is quite clear from Figs.2–5 that the preceding-multiple-lattice self-anticipative density integration effect is very helpful in suppressing traffic congestion.
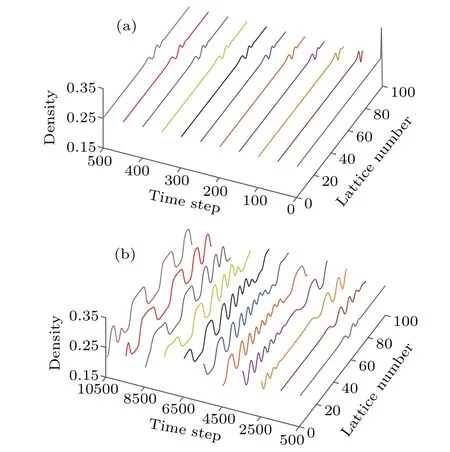
Fig. 3. Spatiotemporal evolution patterns of density wave when γ =1 and m=1.

Fig. 4. Spatiotemporal evolution patterns of density wave when γ =1 and m=2.

Fig. 5. Spatiotemporal evolution patterns of density wave when γ =1 and m=3.

Fig.6. Density evolution profiles of lattices j=90,80,and 70 at the first t=500 time steps for different values of γ and m: (a)γ=0,(b)γ=1 and m=1,(c)γ =1 and m=2,(d)γ =1 and m=3.
Meanwhile, figure 6 describes the density evolution profiles of latticesj=90,80,and 70 at the firstt=500 time steps for different values ofγandm. The pattern in Fig.6(a)corresponds to the case where no preceding-lattice self-anticipative density integration information is considered. The patterns in Figs. 6(b)–6(d) correspond to the situations where the preceding-lattice self-anticipative density integration information is considered, and the considered numbers of preceding lattices arem=1,m=2,andm=3,respectively. In Fig.6,in a short simulation time step,the outer side disturbance causes the initial stable traffic flow to evolve into a local fluctuation.The local fluctuation propagates backward from latticej=90 toj=70. Also, the scale of the local fluctuation becomes smaller and smaller when the preceding-multiple-lattice selfanticipative density integration effect is taken into account by comparing the patterns in Figs.6(a)–6(d).
Corresponding to Fig. 6, figure 7 provides the density evolution profiles of latticesj=90,80,and 70 in the time interval betweent=9000 andt=10000 time steps under the same conditions. In Fig. 7, it is noted that the final traffic states, no matter whether it is stable or not, are quite similar to each other for latticesj=90, 80, and 70 when the considered preceding-lattice number is fixed. This means that the traffic flow stability is a system-involved problem: it is independent of the selection of lattice number. In addition,by comparing the variation tendency of traffic states from the patterns in Fig. 7(a) to that in Fig. 7(d), it is shown that the unstable traffic flow has been alleviated gradually when morepreceding-lattice self-anticipative density integration information is considered,and the traffic congestion can completely be eliminated when three-preceding-lattice self-anticipative density integration information is taken into account.
Figure 8 gives the density evolution profiles of latticesj=80 fromt=0 andt=10000 time steps corresponding to the cases whereγ=0 in Fig.8(a),γ=1 andm=1 in Fig.8(b),γ=1 andm=2 in Fig.8(c),γ=1 andm=3 in Fig.8(d). From Fig. 8 we can see that the traffic evolution processes under a disturbance for different values ofγandmare quite different.The intensity of density wave fluctuation is the greatest when the preceding-lattice self-anticipative density integration is not taken into account. However,the unstable level of traffic density wave decreases gradually when the preceding-multiple-lattice self-anticipative density integration information is considered. When three-preceding-lattice self-anticipative density integration information is considered, the traffic density wave disappears. It further verifies the stabilization effect of multiple-lattice selfanticipative density integration on traffic flow.

Fig.7. Density evolution profiles of lattices j=90, 80, and 70 from t =9000 to t =10000 time steps for different values of γ and m: (a)γ =0, (b)γ =1 and m=1,(c)γ =1 and m=2,(d)γ =1 and m=3.

Fig.8. Density evolution profiles of lattices j=80 from t =0 to t =10000 time steps for different values of γ and m: (a)γ =0,(b)γ =1 and m=1,(c)γ =1 and m=2,(d)γ =1 and m=3.
5. Conclusions
In this paper, a new traffic lattice hydrodynamic model is proposed to study the influence of multiple-lattice selfanticipative density integration on traffic flow in the V2V environment. Firstly, with the linear analysis method and the nonlinear analysis method, the new model’s linear stability condition is derived and the propagation rule of the traffic density wave in the unstable region is revealed, respectively.It is shown that the unstable traffic density wave can be described by the solution of the mKdV equation. Then,through numerical simulation, the influence of multiple-lattice selfanticipative density integration on traffic stability is verified.The results show that multiple-lattice self-anticipative density integration effect can enhance the stability of traffic flow.
杂志排行

Chinese Physics B的其它文章
- Transient transition behaviors of fractional-order simplest chaotic circuit with bi-stable locally-active memristor and its ARM-based implementation
- Modeling and dynamics of double Hindmarsh–Rose neuron with memristor-based magnetic coupling and time delay∗
- Cascade discrete memristive maps for enhancing chaos∗
- A review on the design of ternary logic circuits∗
- Extended phase diagram of La1−xCaxMnO3 by interfacial engineering∗
- A double quantum dot defined by top gates in a single crystalline InSb nanosheet∗