B IM +A R& 三维扫描在轨道交通中的智慧运用
2021-12-14许展鹏张忠瑜车永富
许展鹏 张忠瑜* 车永富
(中交二公局铁路建设有限公司,陕西西安 710100)
在科学技术飞速发展过程中,BIM 技术、三维扫描技术、AR技术在轨道交通领域得到了充分的运用,为轨道交通工程领域的发展提供了充足的驱动力。通过将BIM 技术与三维扫描技术、AR 技术进行有机整合,可以进一步提高轨道交通工程的管理效率,降低不必要返工风险,为轨道交通工程施工效益的提升提供支持。因此,探究BIM+AR&三维扫描智慧化管理方案的搭建及应用过程非常必要。
1 BIM+AR&三维扫描的概念
1.1 BIM
BIM(Building Inform Modeling)即建筑信息模型,主要是以三维数字技术为基础,依据IFC(Industry Foundation Class)标准进行工程项目各种信息集成,搭建工程数据模型[1]。在多年的发展过程中,BIM 技术不仅可以应用于工程造价、进度管理,而且潜藏着设备管理能力,为工程管理思维方式创新提供了充足支持。
1.2 AR
AR(Augmented Reality)即增强现实,强调将虚拟信息、真实世界有机融合。AR 技术将三维建模、智能交互、多媒体、传感、实时跟踪等技术进行了有机整合,可以将计算机生成图像文字与音乐视频进行虚拟仿真[2]。AR 轨道交通主要是运用AR 技术进行轨道交通设施建设、工具设计与运行维护,在基于AR 的三维环境内,工作者可以“全身心”地投入到轨道交通工程中。
1.3 三维扫描
三维扫描即三维激光扫描,主要是以测绘技术为基础,面向特定目标某一点位,开展精准三维坐标测量。测量得到一个单独或部分离散点坐标数据,为全景点坐标关联奠定基础。当前三维扫描主要利用三维激光扫描仪,其可以通过向旋转式镜头中心发射红外线光束,实现环境周围激光的旋转监测。进而根据红外线位移数据,进行激光发射点、物体距离计算,最终经编码器,进行镜头旋转角度、水平角度的测量,获得每一点Z 轴、X轴与Y 轴坐标。
2 BIM+AR&三维扫描智慧化管理方案的搭建
2.1 BIM+AR
2.1.1 开发APP
BIM 技术与AR 技术结合的过程,就是以移动终端软件为载体将现实场景、虚拟场景有机交融的过程。在这个过程中,需要利用移动智能终端摄像头,开展位置追踪、场景判别,经移动智能终端屏幕显现虚拟三维模型。为了实现上述功能,应利用三维扫描点云,进行对应的BIM 模型构建。在BIM 模型构建完毕后,可以进行型号、材质、尺寸等属性信息添加。在属性信息添加完毕后,可以导出为FBX 格式的文件。在获得FBX 格式的文件后,准备Vuforia AR 插件(Unity 3D 软件),经Vuforia AR 插件完成FBX 格式文件向Unity3D 软件的导入。进而通过Unity3D 软件,进行脚本编写、操作,完成移动智能终端软件的开发。开发完毕后,将软件安装在移动智能终端。经移动智能终端摄像头,完成轨道交通图像扫描、虚拟轨道交通信息模型显示。
2.1.2 AR 拆装模拟。
BIM+AR 工作流程如图1。
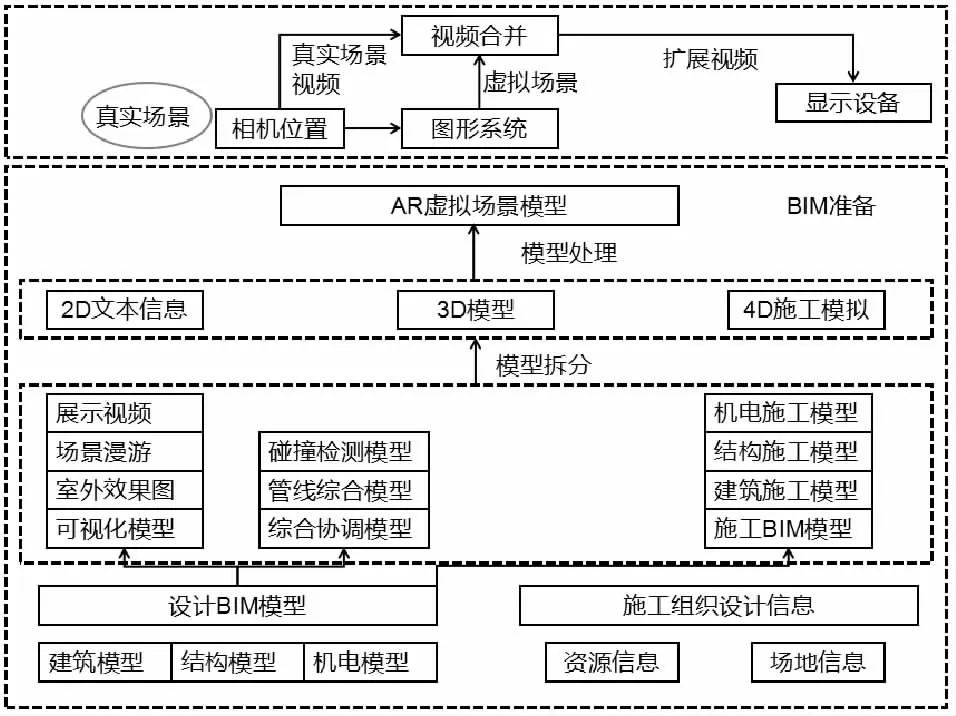
图1 BIM+AR 工作流程
2.2 BIM+三维扫描
BIM+三维扫描流程如图2。
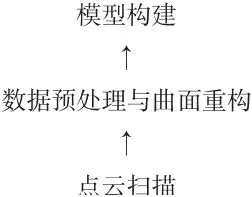
图2 BIM+三维扫描流程
2.2.1 点云扫描
点云扫描是BIM+三维扫描的第一步,需要利用三维激光扫描技术进行轨道交通复杂曲面结构以及关键部位的扫描。并初步对点云数据进行网格化处理。鉴于点云数据量较大,直接应用可行性不高,因此,可以利用专业非接触式的三维扫描软件,获得特定轨道交通实体点位三维坐标值,并将其输入位FBX 格式,完成网格面数优化,降低数据量。优化前后数据如表1。
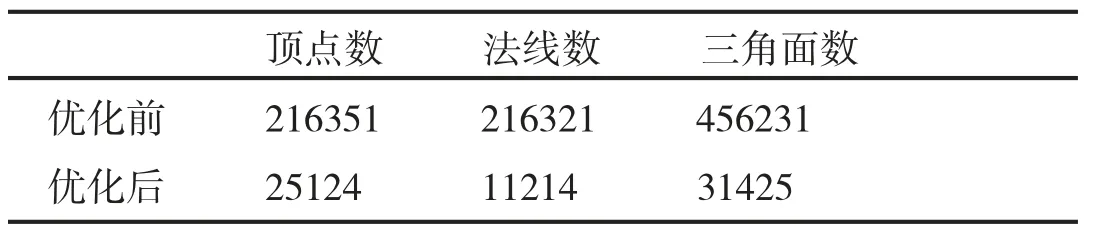
表1 优化前后网格面数对比
如表1 所示,优化后顶点数为25124(优化前为216351),法线数为11214(优化前为216321),三角面数为31425(优化前为456231)。
2.2.2 数据预处理与曲面重构
在点云数据网格化处理的基础上,还需要利用评估、滤波技术,进行数据的进一步处理。数据评估处理主要是基于发现重复区域杂乱点、测量遗漏点的目的,确定是否需要再次扫描;数据滤波则需要从减少数据量入手,进行表面噪声去除以及测量数据平滑处理[3]。
在数据预处理后,还需要面向含有自由曲面的复杂型面,结合轨道交通原型特征,进行测量数据的多区域分割,为每一个区域拟合出对应的曲面。进而利用曲面间过渡、求交手段,进行多曲面的连接。
2.2.3 模型构建
在三维激光扫描轨道交通目标物的基础上,可以在3D max软件内将FBX 格式转换为DWG 格式,为后续AUTODESK 软件运行提供支持。进而将DEG 格式文件导入到Revit 软件内,利用剖面框,完成点云裁剪、分割、遮挡去除操作[4]。同时根据轨道交通实体构件轮廓,选取特征点进行放样、拉伸、空心剪切、融合操作,完成点云翻模,保证三维轨道交通模型轮廓精确度。在这个基础上,经现场视频、照片、实体勘测数据、设计图纸,进行轨道交通构件内部原始信息的完善。一站扫描并无法保证完整的轨道交通实体信息的反映,因此,完成初步点云翻模后应选择不同位置进行多站三维扫描。利用多站三维扫描控制点坐标、方位,完成坐标转换,为点云合并、拼接打好基础。
3 BIM+AR&三维扫描在轨道交通中的智慧运用案例
3.1 案例概述
深圳市城市轨道交通6 号线支线车站为地下二层岛式车站,地下一层、二层分别为站厅层、站台层,总建筑面积为13654m2。车站包括4 个出入口。该工程作业面自然采光效果不佳,且各系统管线层叠密集,极易出现结构主体尺寸与安装尺寸偏差,加之专业配合接口较多、设备重体积运输量大,对工程管理提出了较高的要求。工程拟采用BIM+AR&三维扫描智慧化应用方案,事先准备有三维激光扫描仪,用于指示、测量放样点,放大倍率为32 倍,测距精度与高速测距精度分别为1.0mm、2.0mm。同时准备了外业移动智能手持终端(平板电脑),用于导入BIM 模型,安装AR 软件,直观显示、控制放样点,见图3-4。
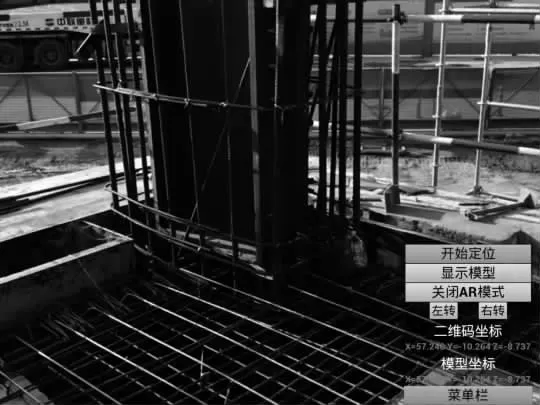
图3 现场实际图
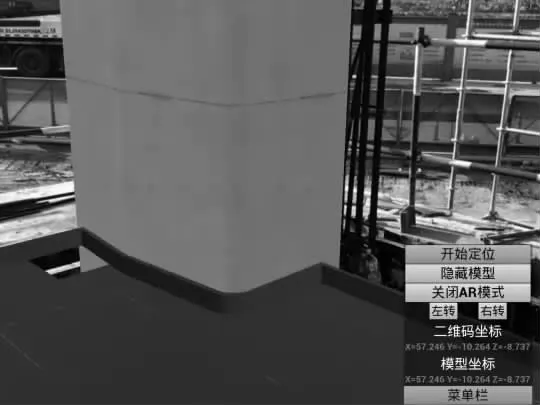
图4 BIM+AR 应用呈现图
3.2 应用过程
BIM+AR&三维扫描智慧化应用方案可以为轨道交通可视化交底、机电管线综合深化防碰撞、安全消防疏散模拟、缩尺3D打印提供支持[5]。以机电管线综合深化防碰撞为例,工程管理人员可以将各专业操作参数压缩后导出到AR 软件内,利用AR软件提供的编辑器工具与放样机器人进行信息交互,指导放样机器人在虚拟环境中完成各专业操作内容预先碰撞模拟。同时为不同专业碰撞风险设置对应的描述、标题、邀请码,并上传到云端,全程展示,促使各专业明确本专业优化节点,降低轨道交通工程开展过程中各专业碰撞风险。进而根据轨道交通现场基准点、放样点位置,协调优化方案[6]。并利用AR 软件内安装的三维模型,对多个可视基准点位置、方向进行聚焦计算。通过激光扫描,在对应计算位置进行标记,为模拟操作优化提供支持。
3.3 应用结果
在以往轨道交通工程开展过程中,经常因各专业间沟通不到位,导致专业碰撞问题频发。而通过BIM+AR&三维扫描智慧化方案的应用,可以在满足各专业意愿的情况下,保证轨道交通系统运用功能不受干扰,解决轨道交通工程结构复杂、工期紧张、净高要求严格等问题,促使轨道交通施工效益进一步提高。BIM+AR&三维扫描智慧化方案应用前后专业碰撞率如表2。
由表2 可知,通过BIM+AR&三维扫描智慧化应用方案的实践,可以大大提高各专业协调性,降低非必要返工风险,节省项目工期,提高项目完成效率。
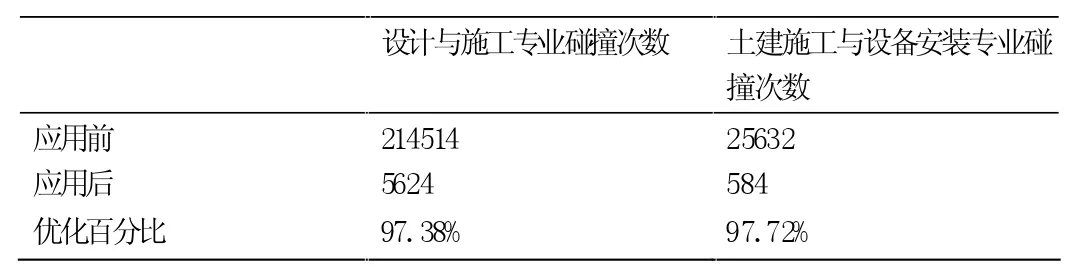
表2 BIM+AR&三维扫描智慧化方案应用前后各专业碰撞率
4 结论
综上所述,BIM+AR&三维扫描的智慧化运用方案,可以在提升工程管理水平的同时,促进轨道交通工程建设事业的可持续发展。因此,应立足便携式移动智能设备大面积普及背景,将BIM 技术、三维扫描与AR 技术应用平台由电脑端转移到移动端。通过移动智能软件的开发应用,为轨道交通工程开展过程的高效率管理提供充足支持。
