浅谈单拖船协助平底驳船靠离三星重工(荣成)船厂的方法
2021-12-09王光辉

摘 要:根据无动力的平底驳船船型特点和操纵特性,结合荣成港口的气象水文条件以及拖船的技术状态,通过力学分析,提出经过实践检验的单拖船协助其靠离三星重工(荣成)船厂(以下简称“荣成船厂”)的作业方法。
关键词:平底驳船;单拖船;力学分析;锚;控速
0 引 言
无动力的平底驳船(以下简称“平底驳船”)作为传统海上运输工具有建造成本较低、吃水小而载重量大、装卸作业可以垂直方式也可以水平方式实施的特点,对应运输某些大型设施有其无可比拟的优势。韩国三星重工作为世界著名造船企业在国内山东荣成和浙江宁波等设有分厂,其生产模式为利用平底驳船从韩国将钢板和各种型材、小型舾装组件、舣装件等运到国内,然后其回程是将国内分厂生产的船舶分段及大尺寸舾装件等运回韩国船厂总装合拢,大幅度提高造船效率。笔者在辖区水域内工作几年,多次引领进出荣成船厂的平底驳船,现将作业中的实际操作步骤做一个归纳整理,以期给从业人员提供参考。
1 平底驳船的船型特点
平底驳船绝大部分為单层平直主甲板型式,便于轮式或履带式装载机械在甲板上展开作业,甲板或货舱利用率高。水下船体总体呈方箱型,船体宽度自艏至艉在长度范围内保持不变。通常船艉没有舵设备,部分平底驳船有类似尾鳍的结构用以提高航向稳定性。其压载水舱可以方便、灵活地用于调整吃水及横倾或纵倾。其轻载时吃水小,适于浅水区航行;水线上高度约为水线下深度的3倍,受风影响明显。平底驳船的艏部通常没有装设碰垫,而其两舷及艉部包括两舷与艉封板的转角部分都装有较为完备的碰垫。因此在不能保证平行靠泊的情况下,保证艉部先接触码头对船体安全是有利的。
进出荣成船厂的平底驳船大部分为万吨级,箱型船体、甲板平直,总长85~98 m、最大宽度26~36 m、最大吃水约3.5 m;实际运营中其载重量约在2 000~6 000 t,吃水约2.2~2.8 m;平底驳船艏艉均有绞缆机,其中船艏另有左右锚机,配双锚。
2 船队带缆方式及操纵特点
平底驳船在其码头前沿水域外由韩国籍主拖船吊拖,靠泊由港方的港作拖船采用傍拖方式完成。
2.1 带缆方式
平底驳船吊拖带缆与他船基本相同;傍拖带缆采用船艏带一根首缆和一根掮缆(艏倒缆),船艉带尾缆,如图1所示,这些缆绳通常各一根,如缆绳强度不足或磨损较严重应带双缆或来回缆。
2.2 傍拖船队操纵特点
2.2.1 傍拖船队前进
由图1可见(拖船带在驳船右舷),拖船采用傍拖方式前进时阻力合力作用在A点,推力合力作用在B点。因为A、B点均在驳船船中艏艉线右侧,因此要保持船队稳定前进必须通过拖船施右舵以产生舵力转船力矩来抵消偏转力矩的作用,而且A点和B点间的距离越大越容易实现。因此拖船应尽可能靠近驳船艉部带缆,艏缆和掮缆尽可能往前往后带,无特殊情况各条缆绳带好后务必收紧以利操纵。
2.2.2 傍拖船队制动/后退
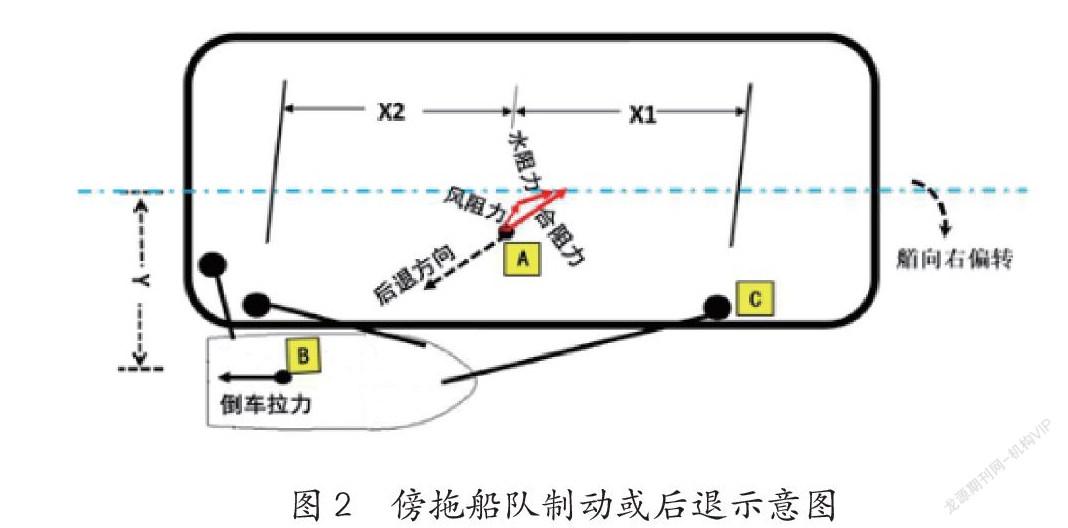
如图2所示,傍拖船队抵达泊位或者紧急避险需要制动或后退时,阻力合力作用点A,拖船倒车拉力作用点B都在驳船船中艏艉线右侧,所以傍拖船队在减速的同时将向右侧平移。同时因为A点位于B点之前,因此傍拖船队在减速、向右平移的同时将向右偏转;拖船倒车拉力越大、艏缆作用点C越靠前偏转角速率越大,偏转幅度越大。当拖船一侧水域并不富裕的情况下应特别谨慎。
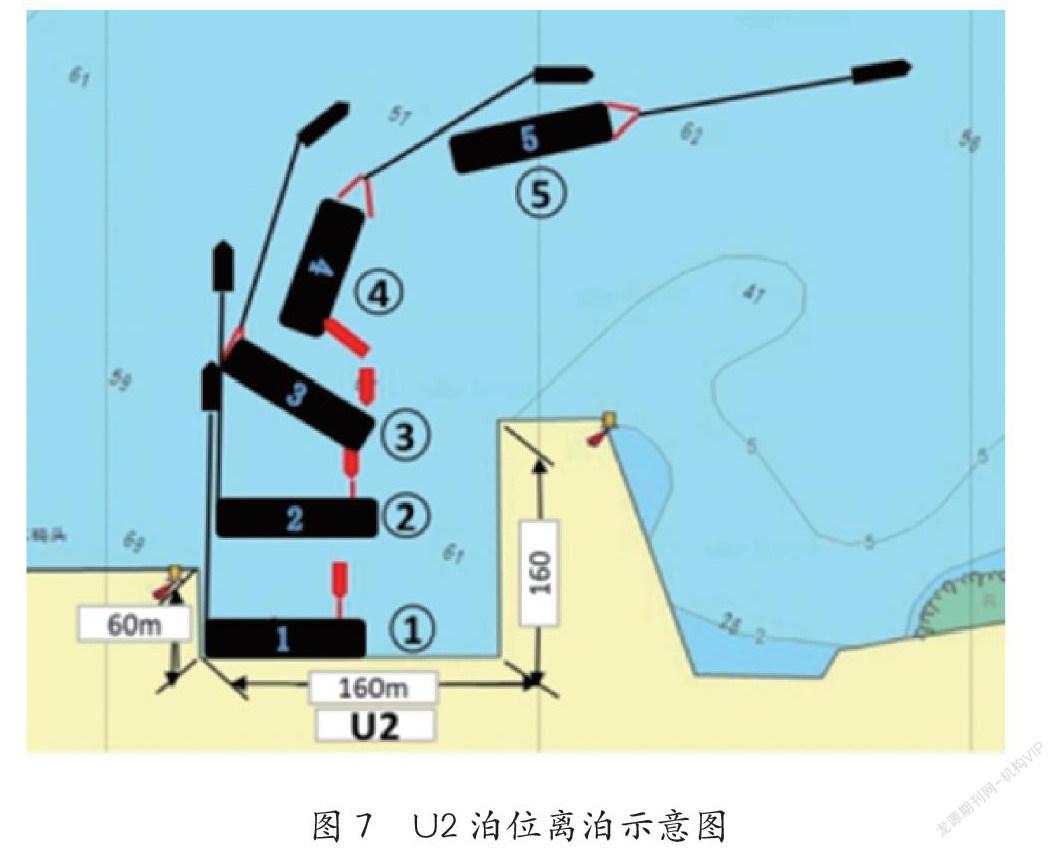
3 风致漂移影响
荣成船厂港区流速较小其影响可以忽略,但因为港区遮蔽条件差,尤其是偏北风影响显著需要注意。其抵港平底驳船平均吃水d约2.0 m,干舷高度平均约3.0~4.0 m。码头前沿水域平均海图水深H大于6.0 m,相对水深2.0 Vy是静止状态下风致漂移速度(m/s); Va是相对风速(m/s); Ba是水线上船体侧面投影面积(m2); L是两柱间长(m); d是平均吃水(m); 若取风速为7.5 m/s,则静止状态漂移速度约0.37 m/s。根据实船试验,航行中的漂移速度Vy′可按下式计算。 式中:Vy′是航行中风致漂移速度(m/s); Vy是静止状态风致漂移速度(m/s); Vx是船纵向运动速度(kn)。 上式中若按靠泊前平均纵向速度3.5 kn来计算,则船队漂移速度约0.22 m/s。 如果按照吊拖主拖缆解掉后傍拖船队运动到泊位平均距离800 m、平均速度3.5 kn计算,其风致漂移距离约100 m,而该港口码头前沿最大安全水域宽度约为360 m,则风致漂移距离约占其27.8%,因此风致漂移是主要的危险因素,尤其是拢风条件下风速远大于7.5 m/s时更需要谨慎对待。 4 用止荡锚抑制驳船艏偏转 为在有限水域内有效抑制上述“2.2.2”中所述的平底驳船船艏偏转问题,锚的正确应用成为最佳解决方案,即以止荡锚形式使用,出链长度为2倍水深。因为锚在水底拖动,所以按照锚动抓力来计算其拖动距离。荣成船厂所在水域底质为泥底或泥沙底,锚动抓力系数按表1查取。 需要用止荡锚时平底驳船速度应在1.0 kn以下,因为速度较低时船体阻力和附加质量均忽略不计,则单锚在水底的拖动距离可按下式计算。 式中:s是锚在水底拖动距离(m); m是平底驳船质量(t); v是驳船艏旋转线速度(m/s); wa是空气中锚重(t),水中锚重取其0.87倍; ca是锚动抓力系数。 假设抵港平底驳船排水量为3 000 t(实践中通常载态),其前进速度低于1.0 kn,排水量的1/2即1 500 t质心位于船艏,旋转线速度为2.0 kn,锚重3.5 t(统计平均结果),在H/d为2.5的条件下锚在水底的拖动距离为15.7 m,这与实际情况基本相符。 5 几种典型靠泊作业 靠泊驳船由主拖船吊拖进厂,一般在距泊位2 n mile左右以傍拖型式带港作拖船。在距泊位500~800 m开始解掉吊拖主拖缆。船队在航道中的航速一般6~7 kn。综合考虑傍拖船队推力中心偏位的操纵特点和风致漂移等因素,经实践检验吊拖主拖缆解掉后傍拖船队的运动速度以3.5~4.5 kn为宜。 5.1 单拖船靠泊B1泊位 B1泊位是该船厂最西端泊位,其西侧为浅滩及礁石,北部及西北部为超范围养殖区,按照船厂生产要求驳船只能左舷靠泊。操作步骤如下: (1)如图3所示,主拖缆解脱后在图示①-②船位余速3.5~4.5 kn,由系带于驳船右后部的傍拖港作拖船进车用舵维持船速并根据需要调整航向。令驳船船员将锚备至水面随时可抛。 (2)图示③船位适时停车淌航,采取小角度、及早、多次方式来调整航向。 (3)图示④船位有两个关键操作,一是将船速刹减到1.5~2.0 kn;二是根据船位不断调整驳船艏向。这里需要注意“2.2.2”中所述拖船倒车在刹减船速的同时会引起驳船艏向右转动的特性。 (4)在图示⑤船位,前进速度控制在1.0 kn以下,驳船基本平行贴靠码头,开始带缆。需要注意的是,因为驳船舷侧碰垫较多因此驳船第一次平行接触码头后可能会被弹离码头且速度快、幅度大;同时拖船此时通常需要倒车将船刹停,因此会带来驳船艏右转,两种效应叠加极有可能将尚未收紧的艏部缆绳崩断造成事故。因此,为防止此类不利情况的发生,在驳船平行贴靠码头的同时,船艏抛下止荡锚,出链长度约2倍水深。船艉则由港作拖船控制,将其顶靠码头。待所有缆绳带妥后,将止荡锚收妥即可。 5.2 单拖船艉靠泊B3泊位 B3泊位因为船厂主要采用滚装或滚卸的水平作业方式,所以根据驳船船型采用尾靠泊方式。 (1)如图4所示,在船位①-②之间将锚备妥水面随时可抛。 (2)③船位是控制船位和速度的关键位置。因为B3泊位靠好后驳船首靠单锚控制,因此锚位必须位于泊位正前方(风速低于10 m/s)或偏上风位置(风速10 m/s以上),锚链长度为方便生产所需的移泊,一般控制在1.5~2.0 kn。风速10 m/s以上天气一般抛2.0~3.0 kn。因此,在此位置附近所做的所有航速和艏向的调整都是为实现此目的。 (3)锚抛出后一般出链1节入水刹住,港作拖船开始倒车推船艉将船速由前进速度改为后退速度,并完成驳船转向掉头。 (4)在船位④-⑤之间,根据驳船艉离码头的距离和后退速度适时松出锚链保持其適度受力以控制船艏,利用拖船控制后退速度及船艉位置。 (5)在船位⑤,船艉距码头8~10 m刹住锚链开始带缆,随后绞缆配合松锚链准确靠妥泊位正中,调整好锚链受力,完成操作。 5.3 单拖船靠泊U1泊位 U1泊位如图5所示,属于“U”型槽西岸壁,其长度仅为60 m,万吨级驳船靠妥后前部大约1/3船长在泊位外。单拖船操纵靠泊此泊位综合了B1和B3泊位的某些特点。归纳如下: (1)在船位①-②之间,关键是控制船速,根据经验宜在2.5~3.0 kn之间。将锚备至水面随时可抛。船艏备妥至少两根撇缆绳。 (2)在船位②-③时是靠泊操作的关键区间,在控速的同时连续大角度向左转向,目的就是为了准确找到锚位。锚位要求在纵向上靠妥后出链长度1.5~2.0 kn,在横向上距岸壁延长线“驳船宽+10~15” m。 (3)在船位③,抛下锚出链一节入水并刹住,拖船开始推船艉进入“U”型槽,在驳船艏艉线大约与岸壁垂直时将驳船艏部尽可能推近岸壁打上撇缆至少带上一根缆绳,然后继续推艉掉头。 (4)在船位④-⑤,根据需要保持锚链和上岸艏部缆绳的适度受力以控制驳船前部,船艉由拖船控制。在入泊后期本着驳船艉部先接触码头并保持住紧密接触的原则,带妥所有缆绳,防止艏部先贴近码头,以免泊位前端码头拐角对船体造成损害。 5.4 单拖船靠泊U2泊位 如图6所示,U2泊位位于“U”型槽的槽底,长160 m。其靠泊操作由前述3个泊位操作要点综合而成。 (1)在船位①-②之间,其操作同U1泊位的操作。 (2)进入槽口的船位③是第一个关键节点,准确转向、保位非常重要。需要注意入槽转向完成后驳船艏向应基本与泊位垂直,船位在纵向上位于泊位后端。 (3)在船位③-④之间是第二个关键节点。此处的关键是控制船速完成掉头,使驳船平行贴靠码头。 (4)驳船接触码头后会出现上述靠泊B1泊位同样的问题,因此需要在贴靠码头同时抛下止荡锚以遏制船艏的运动,待靠妥后将止荡锚收回。 6 典型的离泊作业 以U2泊位的离泊为例做一个简单阐述。如图7所示,解缆前主拖船需要带好主拖缆(非特殊情况驳船艏均为“八”字龙须缆),主拖船将主拖缆慢慢放出并就拖位,使主拖缆垂直驳船艏艉线并保持适度垂度。港作拖船带于驳船艉准备与主拖船一起将驳船平行拖离泊位。随着位置的改变,待驳船让清西侧短岸壁后可以让主拖船渐次加车并向右转向;调整港作拖船的用车以控制驳船艉的运动。 离泊过程看似相对简单,但发生事故的风险远远高于靠泊操作。主要体现在: (1)离泊驳船通常满载船体分段,载重常在3 000~5 000 t,并且分段尺寸高大,各方向上均受风影响显著。在船位①-③间,驳船尚位于“U”型槽中,如果主拖船与港作拖船配合不好,在大风作用下驳船风致漂移显著,有触碰岸壁的危险。 (2)在船位③-④间,需要特别注意驳船此时主要运动姿态是转向,其南北方向上由初始平行离泊带来的余速衰减很快,在冬季西北大风影响下很容易被压向东侧岸壁造成危险。 (3)在船位④-⑤间,需要注意主拖船的渐次加车和转向节奏控制,特别是主拖缆与主拖船艏艉线之间夹角的大小,严防出现横拖置主拖船于险地。 7 结 语 平底驳船水下线型和水上受风结构均有别于普通船舶,在拖带作业中有其操纵特性,主要体现在直航性差、旋回性好、受风影响显著、惯性小等,对其操纵特性在深刻认知的基础上趋利避害、变害为利是操纵指挥者制定作业方案的基本原则。因此,驾引指挥人员在平底驳船拖带作业前应多考虑可能遇到的困难,根据作业当时的客观条件来制定切实可行的作业方案;对各方面配合可能会出现的不协调留有充分的准备并做好应急预案。只要方案合理、措施得力、各方协调,就能保证作业安全。 参考文献 [1] 李义斌,陆悦铭.拖带中小型无动力船舶时拖船的使用及注意事项[J].世界海运.2011(02):1-3. [2] 房希旺,何欣,杨林家.船舶操纵[M].大连:大连海事大学出版社,2012. 作者简介: 王光辉,一级引航员,本科,(E-mail)pilotwgh@163.com,18006312996
