合成孔径与真实孔径边坡雷达技术对比分析
2021-12-08韦忠跟
韦忠跟
(1.中煤科工集团沈阳研究院有限公司,辽宁 抚顺 113122;2.煤矿安全技术国家重点实验室,辽宁 抚顺 113122)
目前,边坡雷达是全世界范围内边坡安全监测领域的领先技术,这项新技术与传统边坡变形监测手段相比,具有非接触性、监测精度高、密度大、覆盖面积广、更新速度快、监测距离远等特点,主要应用于大坝、边坡、山体、建筑物方面的微小位移监测及灾害预警[1-2]。近年来,边坡雷达在露天矿软岩边坡的长期监测,岩质边坡的临滑预警方面得到广泛应用,尤其在预测预警片帮及滑坡等地质灾害方面具有较高的准确率。
边坡雷达技术在边坡监测预警方面具有明显优势,但对于不同种类的边坡雷达技术,其工作原理和工程应用效果存在显著差异,因此不同地质条件的矿山边坡要选择不同的雷达监测手段。目前,边坡雷达按工作原理可分为合成孔径雷达和真实孔径雷达,2 种雷达在技术原理、工作范围、参数校正、预测预警等方面有较大差别。为此,通过合成孔径雷达和真实孔径雷达2 种雷达详细的技术和应用对比,分析各自的表现能力和实际应用效果,得出不同种类雷达在不同矿山的适用性,指导矿山合理地选择边坡雷达技术进行监测和预警,保证监测范围内作业车辆及人员的安全。
1 合成孔径雷达和真实孔径雷达概述
1)合成孔径雷达。合成孔径雷达以意大利IDS公司的IBIS 边坡雷达为代表。合成孔径雷达技术衍生于航空航天地球测绘技术,具有扫描距离远,覆盖范围广的特点,但是其扫描所得图像为二维图像,在边坡监测领域应用时需有外部的DTM 三维地形数据的支持才能转换为三维图像,进而对边坡位移进行监测,DTM 数据本身带有一定的误差,从而影响了该技术测量边坡的三维变形精度[3-5]。
2)真实孔经雷达。真实孔径雷达以南非Reutech公司的MSR 边坡雷达为代表。真实孔径雷达技术是针对露天采矿等人工高边坡稳定监测要求而开发的新一代变形监测雷达技术,其更加适应现代岩土工程施工过程中产生的人工边坡监测,无需DTM 三维 模型辅助,可直接获得三维边坡的变形数据,同时具备移动性强的优势,已逐渐成为工程边坡监测领域的主流技术[6-11]。
2 合成孔径雷达和其实孔径雷达技术对比
2.1 扫描工作原理
合成孔径雷达和真实孔径雷达对边坡进行扫描的工作原理示意图如图1。
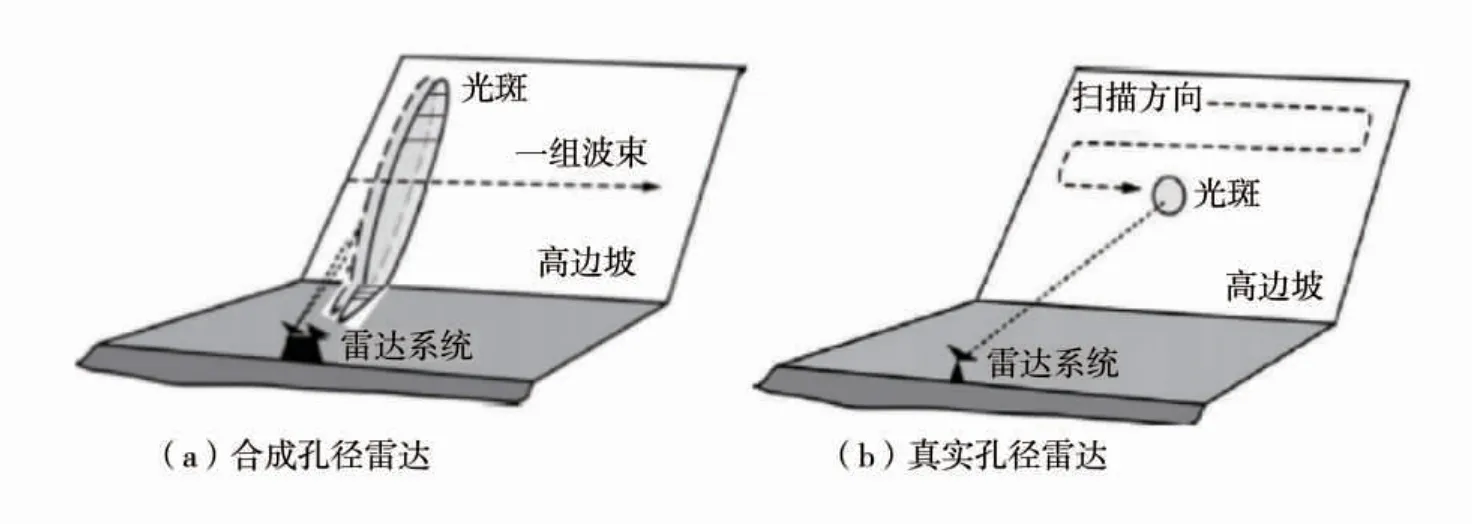
图1 合成和真实孔径雷达扫描工作原理示意图
合成孔径雷达扫描方式是信号发射天线在2 m长的水平导轨上沿着与边坡平行的方向进行水平步进移动,雷达发射的角度是固定值;而真实孔径雷达扫描方式则是发射天线在水平和垂直方向进行大角度转动,对边坡实施步进式逐行扫描,其扫描范围取决于发射天线的水平和垂直转动角度。
当雷达的布设位置须与被测边坡距离较近时,由于合成孔径雷达扫描角度为固定值且角度远小于真实孔径雷达,实际监测范围大小受到制约,因此该情况下很难满足实际监测工程的需要;当雷达的布设位置须与被测边坡距离较远时,较小的雷达扫描角度即能完成大范围的监测任务,所以该情况下两者监测效果相当。
2.2 云图显示效果
合成孔径雷达扫描示意图如图2,真实孔径雷达扫描示意图如图3。
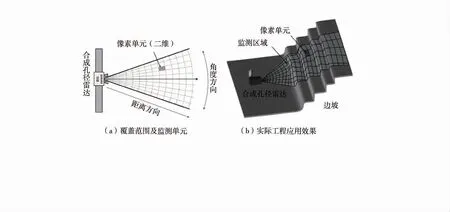
图2 合成孔径雷达扫描示意图
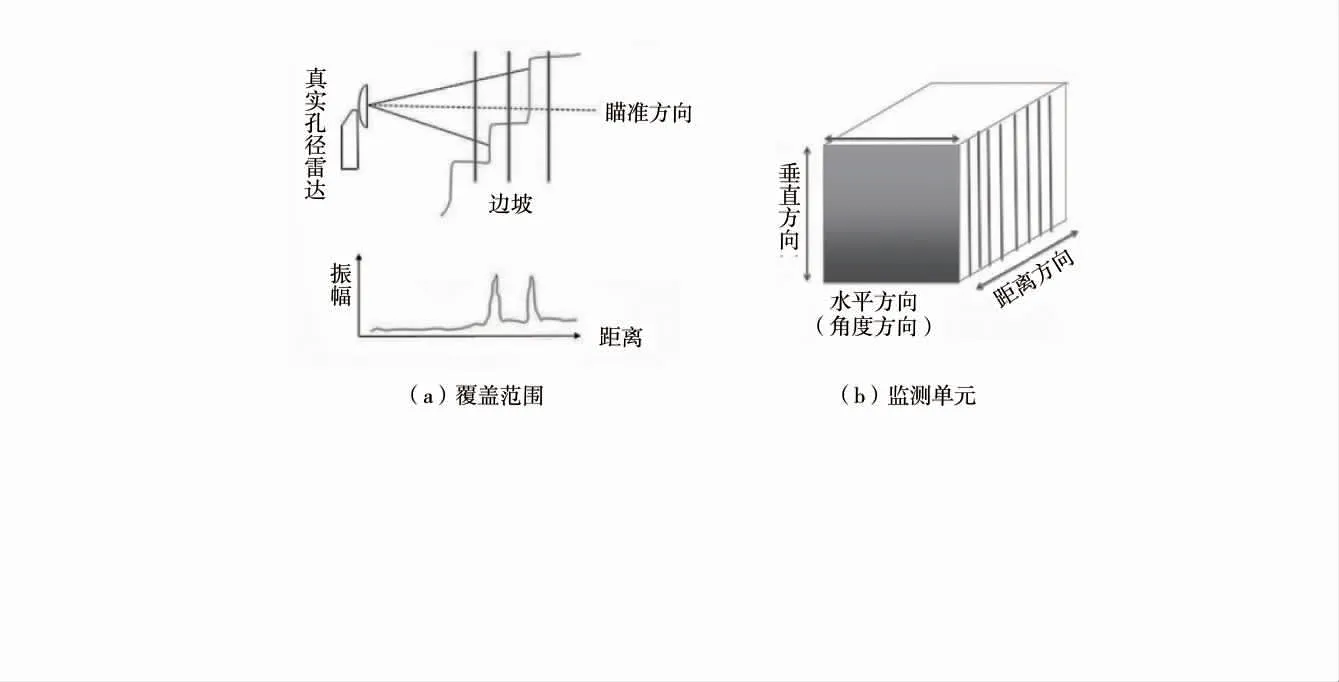
图3 真实孔径雷达扫描示意图
合成孔径和真实孔径雷达在监测单元方面具有较大的,对于合成孔径雷达,通过合成孔径技术(SAR)和线性调频连续波技术(SF-CW)的结合,监测区域就被分割成很多二维的小单元,扫描得到的图像是二维图像,因此在处理单元上是二维数据,而真实孔径雷达通过水平方向和垂直方向的步进式机械旋转以及调频连续波技术,扫描得到的是三维图像,处理单元是三维数据。由于监测单元的不同,2种雷达在数据采集过程中得到的位移云图有很明显的差别。
1)合成孔径雷达扫描得到的是二维位移云图,在进行边坡稳定性监测的过程中,需要添加外部的DTM 三维地形图,才能生成最终的用户显示,再进行三维空间的稳定性监测和分析。合成孔径雷达的三维位移云图的转化如图4。
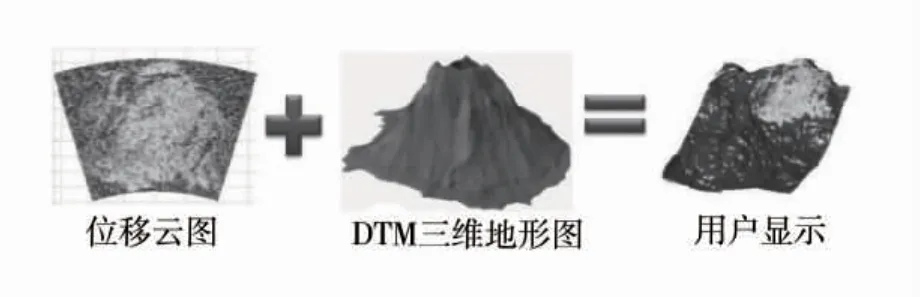
图4 合成孔径雷达的三维位移云图的转化
2)真实孔径雷达扫描得到真实的三维位移云图,因此不需要使用外部的三维地形图数据即可生成实际边坡的三维用户显示,进而对边坡的稳定性进行监测和分析。
2.3 数据更新速度
一般情况下,由于雷达位置距离被测边坡较远,雷达波在传播过程中受到大气温度、湿度和压力等气候条件的影响,因此在使用雷达进行边坡监测时,需要校正大气条件对于雷达波的影响。
合成孔径雷达是通过对比一系列已采集的历史数据(一般为15 组图像数据)后,通过计算寻找边坡表面受大气条件影响较小的稳定点,然后根据该稳定点来建立大气影响修正模型,进而校正下1 幅的扫描图像。当监测区域大气条件发生剧烈变化(如突发雷阵雨,大风等不确定因素)时,对应于历史数据的大气条件与当前监测的大气条件有较大的不同,此时,历史数据的滞后性会当前监测精度产生较大影响。
真实孔径雷达是通过矿山工作人员获取边坡上某一相对稳定参考区域,通过该稳定参考区域进行大气参数的校正,其校正过程在1 个扫描周期内即可完成。而且人工指定边坡稳定参考区域比计算对比获得参照点更直观可靠,所以真实孔径雷达在大气条件校正方面更加迅速和准确。
对于单次扫描速度合成孔径雷达一般为3 min,真实孔径雷达一般为7 min,但是在校正大气条件后,得到真实可用的边坡监测数据,则真实孔径雷达更快。合成孔径雷达一般需要扫描15 组图形数据后才能建立气候条件修正模型,因此实际上得到可用的监测数据需要至少45 min;真实孔径雷达通过设定某一稳定参考区,在获取每个像素单元的扫描过程中,实时使用稳定参考区域来进行图像的校正,因此得到的三维图形速度更快,数据更加准确可靠。
2.4 监测距离及精度
一般来说,合成孔径雷达具有更远的监测距离。目前,合成孔径雷达最远的监测距离达到4.5 km,真实孔径雷达最远的监测距离为4.0 km,2 种雷达的极限监测距离差距不大。但雷达的实际布设位置与被测边坡距离较远时,2 种雷达都会带来较大的干扰因素,例如大气条件校正的困难、真实精度的下降、扫描时间的增加、障碍物的影响等。因此,较理想的监测距离是1 km 范围的边坡,2 种雷达均能满足该项技术需求。
合成孔径和真实孔径雷达均为亚毫米级测量精度,在实际应用中,由于监测距离远,雷达波在空气中的传播过程受大气条件的影响,实际精度也无法达到理论上的最大值。另外,雷达波往往不是以垂直方向正对边坡发射,实际监测位移与真实位移存在三角函数关系,但雷达的真实监测精度一般也都在毫米级,完成可对影响边坡稳定性的表面位移等数据进行监测,因此2 种雷达的理论精度均能满足边坡监测工程的实际需求。
3 结语
1)通过合成孔径和真实孔径雷达扫描工作原理的对比,在雷达布设位置与被测边坡距离较近的情况下,合成孔径雷达更难满足实际监测工程的需要。
2)合成孔径技术产生的监测单元为二维数据,真实孔径技术产生的监测单元为三维数据,因而合成孔径雷达仍须添加外部DTM 三维地形图进行最终的三维位移图像显示,真实孔径雷达则直接生成实际边坡的三维位移云图。
3)合成孔径雷达通过对比历史数据进行大气条件校正,真实孔径雷达通过人工选择稳定参考区域进行大气条件校正,真实孔径雷达在大气条件校正方面更加迅速和准确。因此真实孔径雷达获取的维图形速度更快,数据更加准确可靠。
4)由于合成孔径和真实孔径雷达极限监测距离差距不大,测量精度都为亚毫米级,因此均能满足边坡监测工程的实际需求。
