管道除垢机器人的系统设计
2021-12-06汤方丽

摘要:随着社会的发展和科学技术的进步,机器人对人们的日常工作和生活产生了很大的影响。作为特殊机器人的重要分支,管线机器人可以在复杂而可变更的管线环境中工作,因此倍受关注。经过几年的深入研究,科技取得了前所未有的发展,但总体应用水平还很低。因此,关于管道机器人技术的研究具有重要的科学意义和广泛的经济发展前景。管道内壁的缩放存在大的硬度,复杂的外观,高速再缩放速度等问题,并且很难去除灰输送管线的尺度。关于灰管道枯竭问题,国内外进行了相关研究,形成了各种管道清洗工法,但存在缺点。
关键词:除垢;管道机器人;高压水射
引言
管道正常工作在缩放后受到影响。其结果是,灰排出系统的消耗功率增大,泵输出下降,灰浆和灰水不能正常排出,影响发电厂的运转。具体的冲击过程导致在管内壁堆积尺度层,减少管道内径,减少有效流动面积,增加管内灰分水的流动阻力。为了节约水资源,有必要将发电站的灰排放系统内的灰分水通过返回管进行再利用,运送到现场。当管子中有缩放时,色标层使变速泵的叶轮卡住,不能正常工作。严重的情况下,锅炉下部的灰、渣流管和流道喷嘴被切断,导致生产事故。同时,灰输送管线内壁的缩放存在大硬度,复杂外观,高速再缩放速度等问题,这个问题非常困难。
1 高压水射流除垢技术的优势
高压水喷气式水流是一种非常集中的能量。喷气式飞机撞击材料表面,完成脏污的破碎和剥离。在加工工序中,作为介质吸收水,有很多其他方法没有的优点。首先,高压水喷射清洗不会损伤清洗材料的表面。根据所清洗的材料的强度和硬度以及所清洗的标度层的强度和硬度,选择合理的喷气加工参数(主要是工作压力、流动、目标距离等)后,高压水喷射可以消除色标层而不会损伤清洗过的物体。
第二,高压喷射器清洗具有高效率的特性。当高速喷气式飞机撞击材料时,材料在接触后几微秒被剥离。在清洗面积大的情况下,可以使用多个喷嘴来实现表面清洗。
最重要的是高压水喷射清洗是无污染的特性。高压水喷气式飞机使用加入了石英砂等研磨剂的纯水或水作为工作介质。废液可以在不污染环境的情况下再生分离,具有没有化学清洗法的优点。
目前已经应用或测试的防缩放和descaling技术的许多类型。根据它们的去除方法,它们大致可以分为化学方法和物理方法,但是这些方法的焦点是相同的:只要定标机制中断了灰管定标的链周期的任何链接可以防止灰管的缩放。基本上有三个特别的想法。其一采取措施加速CaCO3的生成速率,使其在进入管道前结垢;其二采取措施推迟CaCO3的生成,使其通过管道之后结垢;其三不阻止管内形成结垢,采取一系列措施,使灰垢失去附壁能力,与灰一起被冲出管外。
本文所使用的高压水喷射水流法是第三角度的构思,即,不会避免在管道内进行定标,但通过一系列防定标措施,其壁附着能力消失,并且很容易挤出管道。这个方案可以有效地避免环境污染的缺陷,管道腐蚀和化学去盐方法的效率降低,并且可以实现煤灰输送管道内壁的高效和清洁的去灰。
2管道除垢机器人主要部件结构设计
2.1机器人整体结构方案
管道除垢机器人利用了管内机器人技术和高压水喷射剥离技术的优点。机器人拉高压水管将喷枪运到解锁管上,最大限度利用机器人行走和管线监控的优点,对环境污染、管道腐蚀、效率高、速度高、类似于高压水喷射枯竭的优点。节水节约能源,低成本和高笛卡尔质量,实现了管道的高品质,高效和无污染的枯竭,可以有效地清洁地面和埋设管道。
管道除垢的机器人由机械壳、步行轮、往返旋转式喷枪、照相机等构成。机壳外侧以半径方向120度间隔分布着3组步行车轮,2个步行车轮在轴方向水平分布。为了满足管径变化和旋转直径变化条件下的作业需求,设计了一种径向调整装置,用于步行车轮支撑体与机器人主体之间的连接。步行轮分为驱动轮和从动轮,共6组分为3组,间隔120度分布在机器人壳的外侧。驱动轮通过减速机由DC马达驱动。
机器人壳上配置有蜗轮齿轮减速马达和不完全齿轮系统。减速器与马达连接,输出轴通过结合与不完全齿轮系统的输入轴连接,齿轮系统的输出轴与高压喷枪连接。不完全齿轮系统能把马达的连续旋转运动变换成180吗?旋转运动通过驱动喷枪实现往复旋转,避免了强制旋转喷枪密封的问题。往复运动的枪位于机器人的前端,由主轴驱动。喷枪的两端设有喷嘴,通过滑动套管与喷枪连接,可进行径向调整。相机位于机器人正面的上部,可水平旋转。底座可以拆卸,配备了防水罩。为了在机器人上记录机器人的位置,可以根据需要在机器人上安装位移传感器。
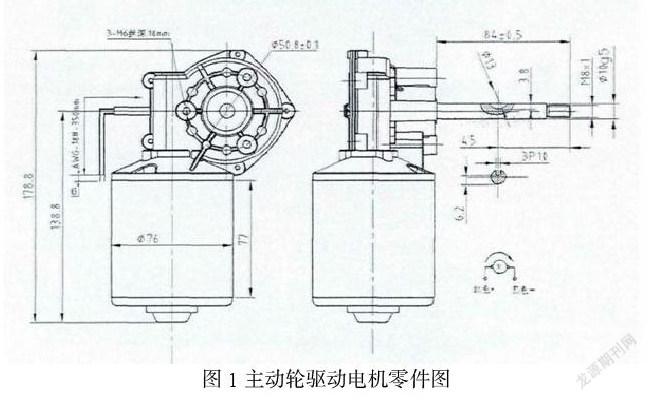
2.2驱动电机选型
主动轮由电机驱动,基本要求为大扭矩、低转速直流电机,工作电压为DC12V,在满足性能指标同时兼顾经济性的情况下,选择体积较小类型的电机。
经比较,主动轮驱动电机选择涡轮蜗杆减速电机,主要考虑其具有输出扭矩大、结构紧凑机体小、安装方便等优点。
经查设计手册以及咨询生产厂家,选定位深圳某公司生产的D59型,主要工作参数为:
电压U1:DC12V;
功率P1:50W;
转速m:10r/min。
2.3不完全齒轮设计
根据机器人的工作要求,不完全的齿轮系统纵向配置在机器人的空腔中,其输出轴位于机器人的前端,与主体的中心同轴。齿轮系统的输入轴与电动机的输出轴连接。然后,输出轴从机器人主体的前部的盖延伸,驱动喷枪。布局方案在图2中示出。
受机器人腔体较小空间限制,齿轮系统采用平行、等距布置3根轴,各轴上安装完全齿轮或不完全齿轮的设计方案。具体方案是,齿轮系统外壳为一个横截面与机器人机体相同的齿轮箱,齿轮箱上前端面与机器人壳体前端面连接,后端面与电动机驱动电机直连。齿轮箱内平行、等距布置I轴、Ⅱ轴、Ⅲ轴,其中I轴安装半齿轮I、半齿轮Ⅱ,Ⅱ轴安装齿轮Ⅲ、齿轮IⅣ,Ⅲ轴安装齿轮V、齿轮Ⅵ,安装时半齿轮齿轮I、Ⅱ中心线呈60?交错。啮合关系为:半齿轮I与齿轮Ⅲ、半齿轮Ⅱ与齿轮VI、齿轮IV与齿轮V相互啮合。具体方案如图3所示。
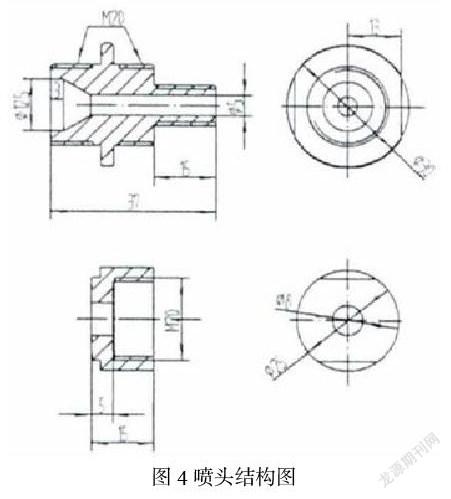
2.4喷头结构设计
喷嘴由喷嘴及其他部件构成,具有旋转、馈电、多光束等功能。喷嘴在整体的水喷射装置中起着重要的作用。喷嘴分为固定喷嘴、强制旋转喷嘴、二维旋转喷嘴、三维旋转喷嘴、真空喷嘴和水切喷嘴。
机器人采用了双重喷嘴,在独立喷嘴上安装了两个喷嘴。这种固定形式通常被称为单个孔喷嘴。
工程应用程序的共同连接方法是,喷嘴主体的一端通过U-PIN快速连接器与高压胶管直接连接。这种连接方法具有连接,分解和安全性高的优点,但缺点是大容量和紧凑的结构。这个方式不能适用于这个产品。
橡胶软管和喷嘴主体预计通过管线连接来连接。这种方法具有紧凑的结构和少量的最大优点。但是,机器人喷嘴主体和橡胶软管的连接和分解并不频繁,不方便的分解问题并不显著。
一般来说,喷嘴机构的设计中考虑的主要因素主要包括以下几点:与材料、尺寸、加工技术等设计特性相结合,喷嘴机构的设计要求主要包括:二)满足结构强度要求。密封要求4紧凑结构和经济要求具体设计方案如图4所示。
3结论
管道机器人属于特殊机器人的分支。在结构上,它是一种可以沿着管线内表面稳定移动的机械电子装置。
根据管线污垢的特性和失谐状态,开发了一种具有德斯林致动器的电缆管线机器人,目的是非破坏性脱盐灰输送管线。这种方法具有腐蚀、污染、成本低、劳动强度低、速度快、效率低的优点。为了解决灰排放管道的去垢问题,有实际意义和经济价值。另外,本文讨论的管道脱落机器人系统具有广泛的参考值。在改进了几个结构和功能之后,可以应用于其他类似的领域。
参考文献
[1]焦圣喜,赵远新,栾宇多.管道除垢机器人监控系统设计与实现[J].机床与液压,2013,41(11):115-117+130.
[2]王岩. 管道除垢机器人设计及除垢效果仿真分析[D].安徽理工大学,2013.
[3]赵远新. 火电厂排灰管道除垢机器人运动控制系统设计[D].东北电力大学,2013.
[4]王成军.煤矿管道除垢机器人的设计[J].煤矿机械,2009,30(08):24-26.
[5]李建国,王成军.燃煤电厂输灰管道除垢機器人设计[J].东北电力技术,2007(09):51-52.
[6]李建国,李伟,王成军.燃煤电厂输灰管道除垢机器人的设计[J].水利电力机械,2007(08):22-23+41.
作者简介:汤方丽(出生年月-1987—1)女,汉族,辽宁省朝阳人,现就职沈阳科技学院,讲师,研究生,研究方向:过程设备设计。
