基于地球系统模式的局地化粒子滤波器与集合卡尔曼滤波器同化实验
2021-12-04张钰婷沈浙奇伍艳玲
张钰婷,沈浙奇,2,3*,伍艳玲,2,3
(1.自然资源部第二海洋研究所 卫星海洋环境动力学国家重点实验室,浙江 杭州 310012;2.河海大学 海洋学院 资料同化与预测研究所,江苏 南京 210098;3.南方海洋科学与工程广东省实验室(珠海),珠海 广东 519080)
1 引言
作为研究大气、海洋科学热门课题之一,资料同化技术不仅可以为海洋数值预报模式提供初始场,还可以构造海洋再分析资料集,为海洋观测计划和数值预报模式物理量及参数等提供设计依据,近年来得到了广泛的研究和应用[1]。集合卡尔曼滤波器(EnKF)是一种有效的资料同化方法,自Evensen[2]于1994年首次提出以来经过了20多年的发展和改进,已经在海洋资料同化中得到了广泛的研究和应用。近年来,随着动力模式的不断发展和计算能力的提高,粒子滤波器(PF)由于不受模型线性和误差高斯分布假设的约束,也逐渐成为了当前资料同化算法研究的热门[3]。
EnKF是集合预报同卡尔曼滤波器(KF)的结合,它使用集合表示模式变量的概率密度分布,并采用KF的更新公式提供线性模型高斯分布假设下的同化最优解。由于EnKF避免了卡尔曼滤波器和扩展卡尔曼滤波器(EKF)中的协方差更新模型,使得它能够被应用于大型地球物理模式。集合调整卡尔曼滤波器(EAKF)是在EnKF基础上发展起来的衍生方法,它一般被视为一种确定性的EnKF格式[4]。EAKF从滤波理论出发推导了一个用于模式变量更新的算子,取代了传统EnKF中的增益矩阵,且无需增加额外的观测扰动,在计算量上有一定的优势[4–5]。作为目前海洋资料同化所采用的主流方法之一—集合卡尔曼滤波器以及衍生方法隐含了预报集合高斯分布的假设,适用于线性系统的同化[6]。
相较于集合卡尔曼滤波,粒子滤波不含高斯假设,对非线性非高斯同化系统能产生更好的同化效果。粒子滤波算法基于贝叶斯估计理论,是贝叶斯公式的蒙特卡罗算法近似。“粒子”与集合卡尔曼滤波器中的集合成员相同,是用于表示模式变量的概率分布的集合样本。如果计算资源充足,随着粒子数目的增加,粒子的概率密度分布会逐渐趋向于真实状态场的概率密度分布,粒子滤波器能够实现最优贝叶斯估计的同化效果[3,7]。经典的粒子滤波器使用似然函数计算每个粒子的标量权重,因此当状态场空间的维数较大时,状态场数值的微小变化会引起对应权重在量级上的巨大变化,多数集合成员会因权重过小而失效,从而导致粒子滤波器的退化[8]。相当多的方法已经被提出来处理粒子滤波器中的退化[9],如最优重要性粒子滤波器[10]、等权重粒子滤波器[11]、集合卡尔曼粒子滤波器[12]、局地化粒子滤波器[8,13]等。本文主要考察的局地化粒子滤波器是最近才被提出的一种同化方法,它通过在经典粒子滤波器中引入EnKF中常用的局地化方法来解决粒子滤波器的退化问题,得到了广泛关注。
局地化方法自21世纪初在集合卡尔曼滤波器的同化中被提出以来[14],已经被广泛地应用于各种业务化集合同化系统中,得到了普遍认可。由于模式集合成员的数量非常有限,在计算背景误差协方差和增益矩阵的过程中往往会出现由于样本不足而造成的虚假远距离相关,造成错误的同化更新。通过引入局地化可以使得同化的更新过程在一个较小子空间中进行,从而抑制这种虚假相关,并大大降低计算量。利用相似的思想,最近的一些工作开始在粒子滤波器中使用局地化,例如,Poterjoy[13]、Shen等[15]、Penny和Miyoshi[8]改善的局地化粒子滤波器已经被初步验证能够使用与集合卡尔曼滤波器相当的集合成员数来避免粒子退化现象,也逐渐地被用于地球物理模式的资料同化中。
本文在耦合的通用地球系统模式(Community Earth System Modal,CESM)中开展了集合卡尔曼滤波器和局地化粒子滤波器的观测系统模拟试验。通过同化模拟的卫星海表温度(SST)资料,考察不同局地化参数对于两种滤波器方法的不同影响。在此基础上,进一步比较了两种滤波器方法的同化效果,探讨了两类方法的优缺点以及发展前景。
2 数据与方法
2.1 模式和同化系统
实验使用的模式为CESM,它是由美国国家大气研究中心(NCAR)于2010年发布的新一代地球系统模式,是目前最先进、使用最广泛的地球系统模式之一。该模式采用模块化框架,主体由大气、海洋、陆地、海冰、河流等几大模块组成,并由耦合器(CPL7)管理模块间的数据信息交换和模式运行。实验使用了CESM1.2.1版本,它的海洋模式为POP2,大气模式为CAM4。本实验使用全耦合的模式设置(B compset)和当代(present day)的外强迫。采用的模式分辨率为0.9×1.25_gx1v6,即大气模式水平分辨率为 0.9°×1.25°,垂向26层;海洋模式水平分辨率接近1°,在赤道区域纬向加密约为0.5°,垂向60层。
实验所涉及的两种同化方法都是借助NCAR开发的资料同化 研究 平台(Data Assimilation Research Testbed,DART)实现。DART是由NCAR的数据同化研究部门开发和维护的一个开源软件。它提供了多种确定性和随机性滤波器算法,包括集合调整卡尔曼滤波器、集合卡尔曼滤波器、核滤波器和粒子滤波器等[16]。我们建立了DART和POP2模式的接口,实现了耦合模式框架下的海洋观测资料的弱耦合同化。鉴于计算量的考虑,我们使用了20个集合成员。在所有的实验中,我们也采用了固定系数为1.02的协方差膨胀和针对20个集合成员的样本误差订正(Sampling Error Correction)方案[17]。
2.2 数据
本文采用的实验方案为观测系统模拟试验(OSSE),其基本思想是使用一组真值实验作为参考值,然后根据实际存在的观测系统对真值取样,并且叠加上具有给定方差的随机误差来模拟观测。在实验中同化上述模拟的观测资料,并利用真值实验得到的参考值来评估不同同化方法得到的分析场。
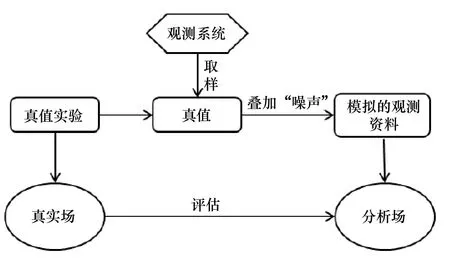
图1 观测系统模拟试验流程图设计Fig.1 Flow chart design of observation system simulation experiment
图1显示了OSSE的流程图,其中我们利用真值实验生成每周一次的全球海表温度观测,其空间分辨率为1°×1°,并叠加上符合高斯分布的随机误差作为观测误差。为简化讨论,我们针对所有观测点使用相同的观测误差标准差。参考OISST[18]中的SST观测误差的全球平均标准差,假设所有位置的误差标准差均为0.3℃。
此外,本文使用了哈德雷中心(Met Office Hadley Center)提供的长度为 100 a(1919–2018)的月平均HadISST (Hadley Centre Sea Ice and Sea Surface Temperature data set)再分析资料[19],主要用于计算 SST 资料对不同距离的变量的相关系数,并与模式20个集合成员计算的样本相关系数进行比较,为局地化系数的选取提供理论依据(见3.1.2节)。
2.3 同化方法和局地化
2.3.1 EAKF 中的局地化
集合调整卡尔曼滤波器(EAKF)[4]是在集合卡尔曼滤波器[2]的基础上发展起来的。EAKF避免了集合卡尔曼滤波器中对观测资料的扰动,且在集合样本数目较少时仍能得到较为满意的结果。EAKF基于线性回归理论逐个顺次地同化观测资料,使用观测空间的局地化后可以将每个观测点的更新范围限制在一个较小的子空间中进行,节省了计算量。
EAKF的同化步骤可以表示如下,若用x表示状态向量,用yo表示误差方差为的观测标量,h表示观测算子,则EAKF公式的第一步是使用观测算子h将状态空间的每个集合成员投影到观测点上,作为每个成员对应观测的先验估计,如下

式中,下标p代表先验值;n代表集合成员

式中,下标u代表后验值
接着使用以下公式计算观测空间的每个成员的后验估计


EAKF最后利用相关系数将每个观测的增量回归到模式变量中

式中,xm,n表示模式第m个分量的第n个集合成员;σxm,y为xm与yp的协方差。
由于集合模式成员数有限,因此所模拟的背景误差协方差会存在一定的虚假信息。这些虚假信息随着距离的增加而增加,且会在同化过程中造成虚假的更新量,影响结果的准确性。为了避免这些问题,我们在EAKF中引入了局地化方案,使用一个数值介于0和1之间且随距离的大小单调递减的因子 ρ,并将式(5)替换为

公式(6)中的 ρ被称为局地化因子,是一个依赖于距离的函数,一般可以由以下公式[20]计算得到

式中,dn代表模式点xm,n和观测点yp,n的距离;c是一个局地化参数,可以控制 ρ的去相关距离。由式(7)可知,当dn大 于2c时, ρ =0,从而观测点yp,n和模式点xm,n完全不 相关。
2.3.2 LPF 中的局地化
相比于EAKF,局地化的粒子滤波器(LPF)最近才被提出来解决传统粒子滤波器中的退化问题[13],因此关于它的研究结果相对较少。在作者所了解的文献中,目前尚没有将LPF应用于CESM模式的研究也鲜有对LPF的局地化参数进行的讨论。
从原理上说,在粒子滤波器中采用局地化是为了使用较小的计算成本来避免滤波退化问题。粒子滤波器的原理是给每个集合成员配给一个权重,用集合成员的加权组合来表示同化变量的完整概率分布密度函数,并随着同化的进行不断更新权重。经典的粒子滤波器使用一个标量的数来代表权重,因此当模式的状态变量维数巨大时,很容易造成其中一个成员占据大部分权重,而其他成员权重都几乎为0的现象这就是滤波退化[2]。
在经典粒子滤波器中,状态场Xn的标量权重可由以下公式计算

式中,wn表示第n个粒子的标量权重;m是所有观测点的总数;观测算子hi用 于将模式预报场投影到其中的某个观测点yi上;是 yi的 方差,这里的正比例符号“∝”意味着计算等式右边之后还需要进行一次标准化使得所有权重的和为1。当m很大时,多个指数函数相乘导致不同粒子的权重很容易有量级上的差异。
在粒子滤波器中引入局地化的基础是将粒子的权重扩展成为矢量,即不同的模式网格点使用不同的权重。在此基础上应用粒子滤波器可以将状态分析过程转移到一个较小子空间中进行,由于子空间的差异性会增加集合成员的多样性,从而降低集合退化的可能。粒子滤波器中的局地化主要用于计算矢量权重,使其适用于大型地球物理模式。但是由于粒子滤波器的同化原理与卡尔曼滤波器有本质的不同,局地化的引入方式也有所不同[21]。局地化粒子滤波器的第一步是将式(8)中的标量权重扩展到矢量权重,也就是说状态场中各个不同的分量采用不同的局部权重,与此同时,集合成员的重取样也都在局地进行。Poterjoy[13]借助局地化公式,利用局地化因子 ρ给出不同分量的权重公式如下

2.4 同化实验设计
本文首先通过敏感性实验考察局地化参数对于EAKF和LPF的同化效果的影响。局地化的参数数值对应了观测点和模式网格点的去相关距离:假设局地化参数的值为c,那么观测点与距离2c以上的模式网格点的相关系数为0。CESM模式中的距离使用弧度制单位表示,例如d=0.1 rad,那么它实际对应的赤道经度为为了处理海洋在垂直和水平方向的不同尺度,同化算法使用一个垂向归一化尺度系数(Vertical Normalization Factor,以下记做ν,单位为m/rad)来进行垂向距离的转化。假设水平方向的距离为dh,单位为(°),垂直方向的距离为dv,单位为m,那么两点之间的模式距离如下计算

根据d和c的比值,可以使用式(7)计算局地化因子 ρ 。显然ν的数值越大,相同的实际垂向距离dv条件下式(10)右端的第二项越小,相同的c可以影响到越远的水平距离。而当ν为无穷大的时候,实际上就关闭了垂直方向的局地化,局地化因子仅由dh决定。
实验所选取的同化数据为海表温度,集合成员数为20,同化频率为每7 d同化一次,同化实验的时间为12个月。同化的初始集合由如下方法产生:我们首先对CESM模式进行了100 a的自由积分,然后在得到的初始场上层30层温度变量上叠加伪随机场[22]的扰动,构成20个集合成员。我们对该集合进行2 a的模式积分,使得每个集合成员各变量之间保持一定的动力平衡,这些积分的结果则被用来作为同化实验的初始集合。
设计的敏感性实验如表1所示:我们首先考察EAKF中的局地化方案,比较了不同局地化参数c和垂向归一化尺度系数ν对于同化效果的影响。我们先固定c为 0.1 rad,然后分别设定ν=1 000 m/rad,1 500 m/rad 2 000 m/rad,以及+∞(即垂直方向不采用局地化)来考察垂向局地化方案对于同化效果的影响。并且分别将实验名称记作Kc0.1v1000、Kc0.1v1500、Kc0.1v2000以及Kc0.1vinf。根据CESM气候模式的距离设置Kc0.1v1000试验中,观测点在海表与水平距离超过大约11.5°的模式格点相关系数为0,同时与其正下方垂直距离超过200 m的模式格点相关系数也为0。然后,我们固定最优垂向归一化尺度系数ν,来考察水平局地化方案对同化效果的影响。由于前一组实验得出的结论为EAKF的最优垂向局地化方案为垂向关闭局地化(见3.1.1节),在此基础上,分别设置局地化参数c为 0.05 rad、0.1 rad、0.2 rad、0.3 rad,分别将对应的实验名称记为Kc0.05vinf、Kc0.1vinf、Kc0.2vinf Kc0.3vinf。类似地,我们也针对LPF探讨了系数ν和参数c的相关问题,利用敏感性实验寻找最优的局地化方案,揭示LPF和EAKF对于局地化的不同要求最后,基于使用最优的局地化方案,我们比较了LPF和EAKF的同化效果,揭示LPF的潜在优势与不足同时,为了显示同化效果,本实验设置了不进行任何同化的控制试验(下文简称FREERUN)进行对照。
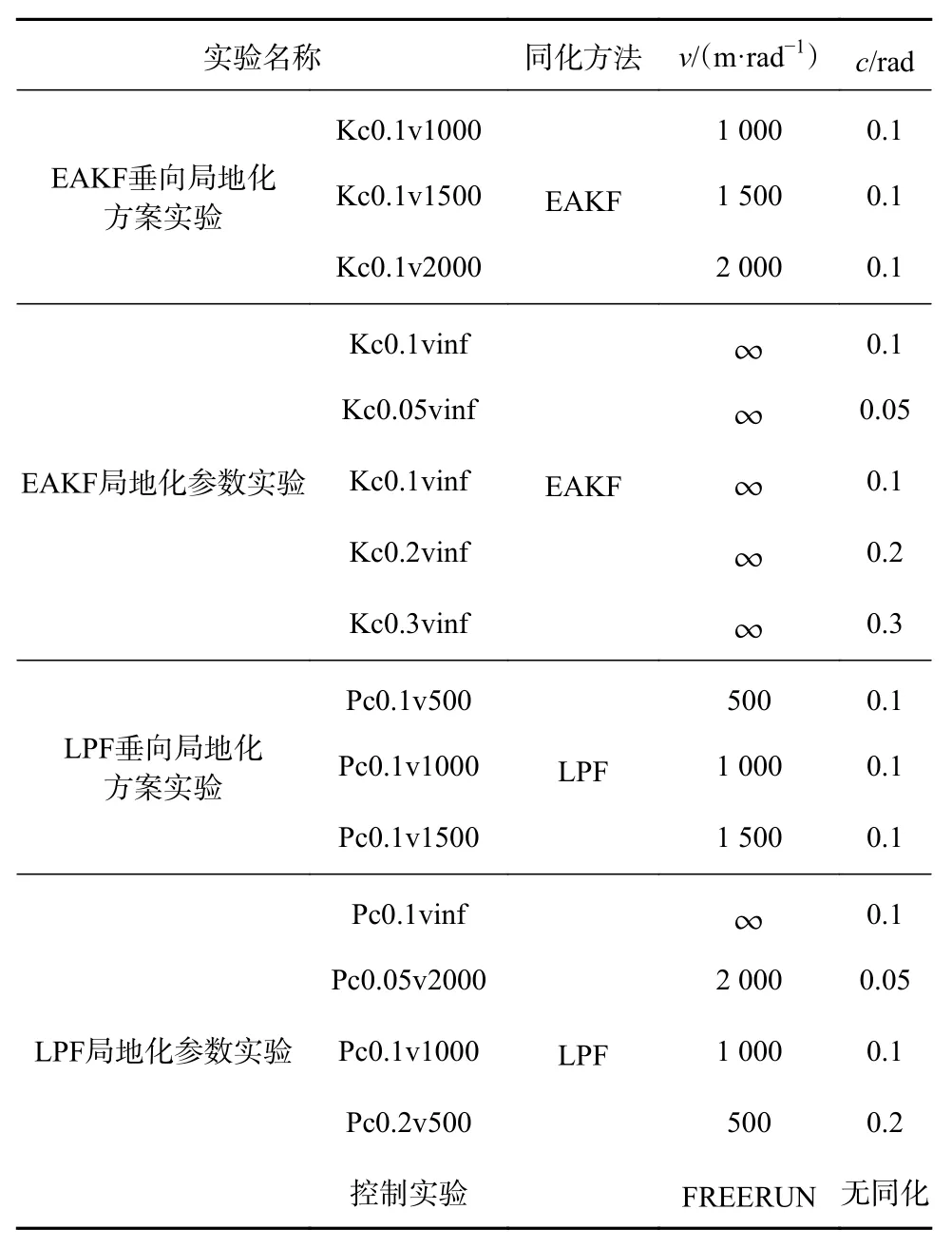
表1 实验列表Table 1 Experimental list
3 实验结果与讨论
3.1 EAKF 局地化对同化效果影响
3.1.1 EAKF 的垂向局地化方案
我们首先固定局地化参数c为0.1 rad,考察不同垂向归一化尺度系数ν对于同化效果的影响。实验采用的系数ν为 1 000 m/rad、1 500 m/rad、2 000 m/rad与局地化参数c相乘以后,对应的距离分别为100 m 150 m/200 m,也就是说,局地化系数ρ在超过 200 m 300 m/400 m 的数值为 0,因此,SST 观测最多能影响的垂直深度为 200 m/300 m/400 m。实验选取了均方根误差(RMSE)作为评判同化效果优劣的标准,其计算公式为
我们首先根据RMSE的垂直分布讨论系数ν对同化效果的影响。图2为设置不同ν时,EAKF同化SST资料后的垂向温盐RMSE。由于同化资料为SST,因此温度的同化效果要明显强于盐度的,在深度较浅时其优势更加显著。对于温度变量,使用不同的系数ν同化SST得到的RMSE在100 m以浅并没有显著差异,且都远小于控制实验的RMSE。而随着深度的增加,变量与观测之间的距离增大,一方面所有实验的同化效果逐渐削弱,另一方面不同实验的RMSE出现差异。特别地,当深度约为150~300 m时,在关闭垂向局地化的Kc0.1vinf实验产生的RMSE是最小的。根据式(6)可知,EAKF利用SST更新深层温度变量的原理是使用SST和给定层温度之间的相关性将表层的观测增量回归到深层。因为深层温度的离散度(标准差)很小,仅有O(10−2),所以即使只使用20个集合成员计算相关系数,表层和深层的相关系数也能够正确表达。所以,虽然Kc0.1vinf实验没有引入垂向局地化,较深层的温度也能够得到正确更新。
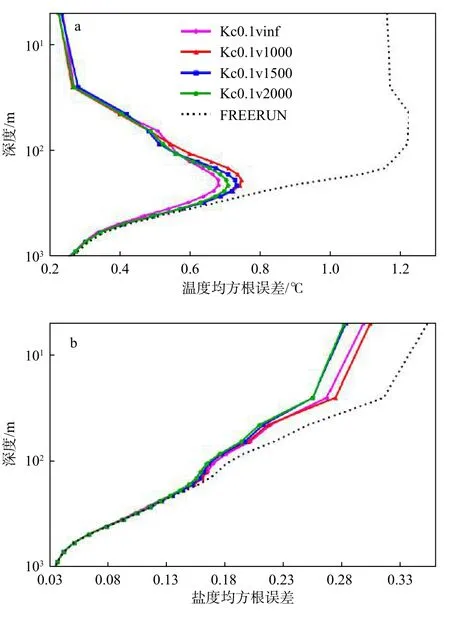
图2 不同垂向局地化方案 EAKF 实验中区域平均(60°S~60°N,环地球)垂向均方根误差Fig.2 Regional mean (60°S−60°N,ring the earth) root mean square error in EAKF experiments with different vertical localization schemes
另一方面,同化SST对于盐度的改进基于温盐相关得到。在150 m以浅,仍然可以发现盐度变量的RMSE小于控制实验的RMSE,但是不同垂直局地化方案对于盐度同化效果的差异主要在较浅层而非深层出现。同时,图2b的结果表明同化SST时ν=1 500 m/rad/2 000 m/rad的局地化能更好地改进浅层的盐度,由式(10)可知,在局地化参数c固定的条件下,对于浅层的变量,尺度系数ν越大,dh起到的作用也相对越大。体现在盐度上就是相同深度的盐度变量获取海表观测的信息就越多。所以我们可以断言,浅层的盐度同化差异实际上受到水平局地化的影响更大综合两者的讨论,在垂直方向不采用局地化是相对更优的方案。
3.1.2 EAKF 局地化参数
对EAKF垂直局地化方案的敏感实验结果显示,EAKF的同化效果在关闭垂直方向的局地化时相对较好。因此,我们在关闭垂直局地化的基础上,分析不同参数c对应的水平局地化方案对EAKF同化效果的影响,第2组实验采用的局地化参数分别为0.05 rad、0.1 rad、0.2 rad、0.3 rad。图 3 从时间尺度上分析各物理量RMSE的变化情况。首先分析表层温度、盐度(SSS)和海表高度(SSH)变量的RMSE变化情况,如图3a所示,SST从启用同化的第2个月开始就一直保持较小的RMSE,且使用不同参数实验的结果没有明显差异。这是由于SST的观测资料比较密集,即使在某个点的同化中引入虚假更新,也很容易被其他点的正确更新所抵消。而对其他两个变量来说,同化SST并不能立刻减小误差,需要进行一段时间的持续同化和模式积分,误差才能显著减小,这点对于SSS特别明显。图3b显示,SSS的RMSE尚处于下降阶段,没有达到稳定,其同化效果与局地化参数的大小并没有明显的相关关系,在最后3个月,几种参数实验的结果没有显著差别。而SSH在局地化参数稍大时同化效果较好,这说明SST和SSH之间的相关性较好,不容易产生虚假相关。
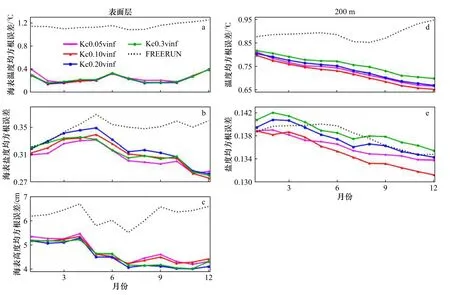
图3 不同局地化参数 EAKF 实验中区域平均(60°S~60°N,环地球)的均方根误差时间序列Fig.3 RMSE time series of regional mean (60°S−60°N,ring the earth) in EAKF experiments with different local parameters
我们进一步分析较深层的同化效果发现,当深度为200 m时,图3d和图3e表现出最优同化效果的局地化参数c=0.1 rad。这是因为我们关闭了垂向局地化功能,因而使得一定水平距离之外的海表观测资料能够无差别地影响整个水柱,随着深度的增加,实际的距离增大,远距离观测带来的虚假相关也会出现。从温度和盐度两个变量,都可以看出c=0.1 rad的同化效果好于c=0.05 rad,这是因为更多的观测资料被用来更新200 m深度的变量;而它的同化效果也好于局地化参数更大的另外两个实验,这是因为后两者会因为虚假相关而带来虚假的更新。
由于集合滤波器的集合成员数量有限,在相距较远的两个点之间会产生虚假的相关,造成错误的更新,这是在EAKF中引入局地化的主要原因。因此,如果可以量化表示给定集合成员数可能造成的虚假相关,就可以相应地选择最优的局地化参数。针对某个给定点上的观测,以1月的控制实验预报值为例,我们使用以下公式定义对应局地化参数c的虚假相关占比(Spurious Correlation Ratio,SCR)

图4为SST相关系数的空间分布,我们分别选取了位于太平洋的两个点(0°,180°)、(20°S,120°W),位于印度洋的一个点(20°S,60°E),以及位于大西洋的一个点(20°N,40°W),计算了使用不同局地化参数下的有效相关系数,样本相关系数和分析相关系数,分别对应图4中的前4列、第5列以及第6列,图中的白色区域表示相关系数小于0部分。从图中可以看出,几乎所有位置的样本相关系数都大于分析相关系数,因此在某些较远区域,样本会夸大SST的相关性,进而引入虚假相关。我们也随机选取了其他多个格点进行相同的计算分析,得到的结论类似。通过引入局地化算法,设置恰当的局地化半径可以在保证近距离相关的前提下去除远距离虚假相关,避免远距观测引起的错误更新[23]。
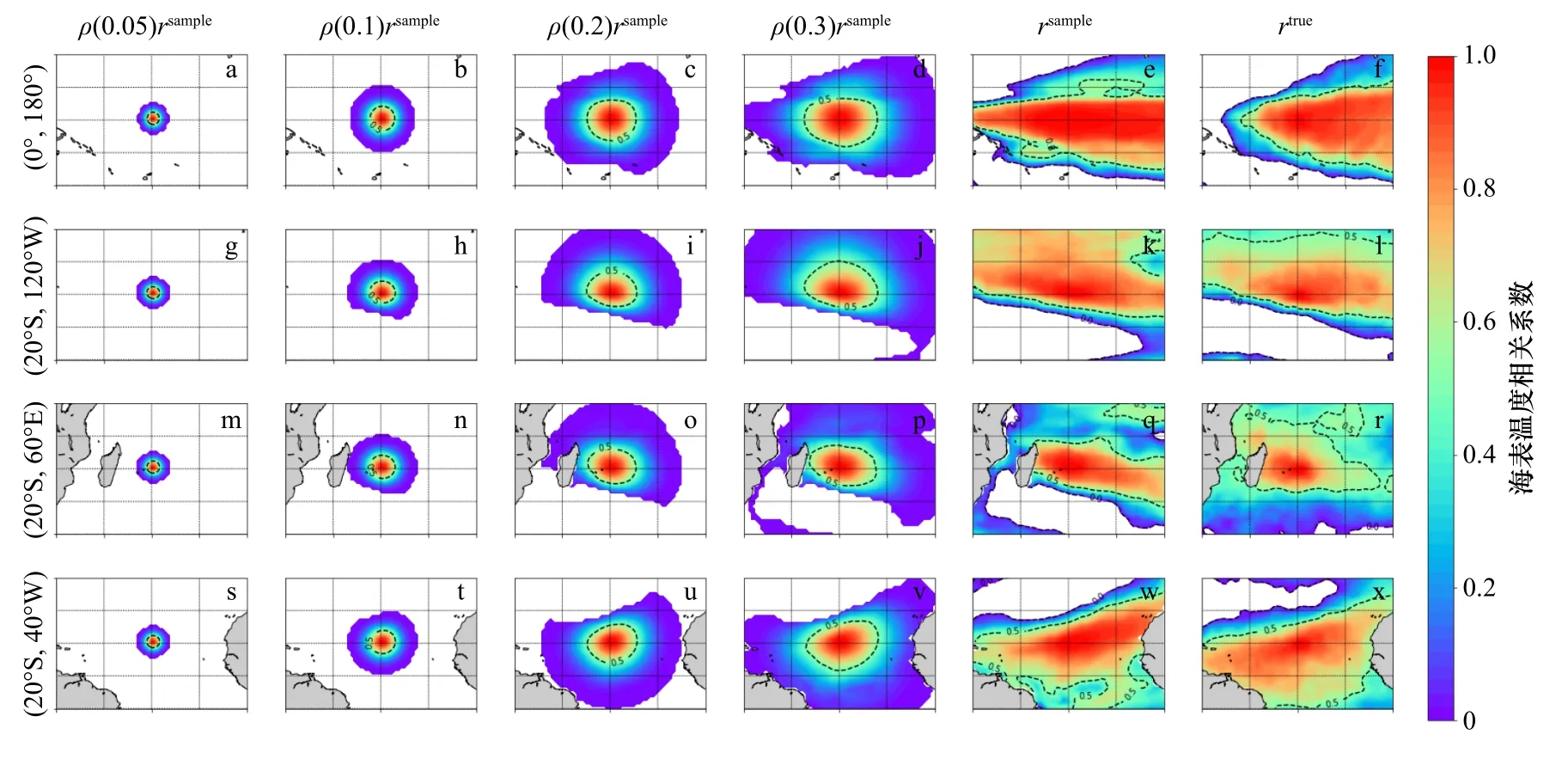
图4 海表温度相关系数Fig.4 Correlation coefficient of sea surface temperature
我们进一步计算了几种不同局地化方案下的虚假相关占比(表2),发现局地化方案的引入大大减小了虚假相关的占比。其中当局地化参数c=0.1 rad时,既不会因为半径过大而引入一些不必要的虚假相关,也不会因为局地化半径过小而滤去大部分正确相关。因此c=0.1 rad相对而言是更优的局地化参数,与前面敏感性实验的结果一致。
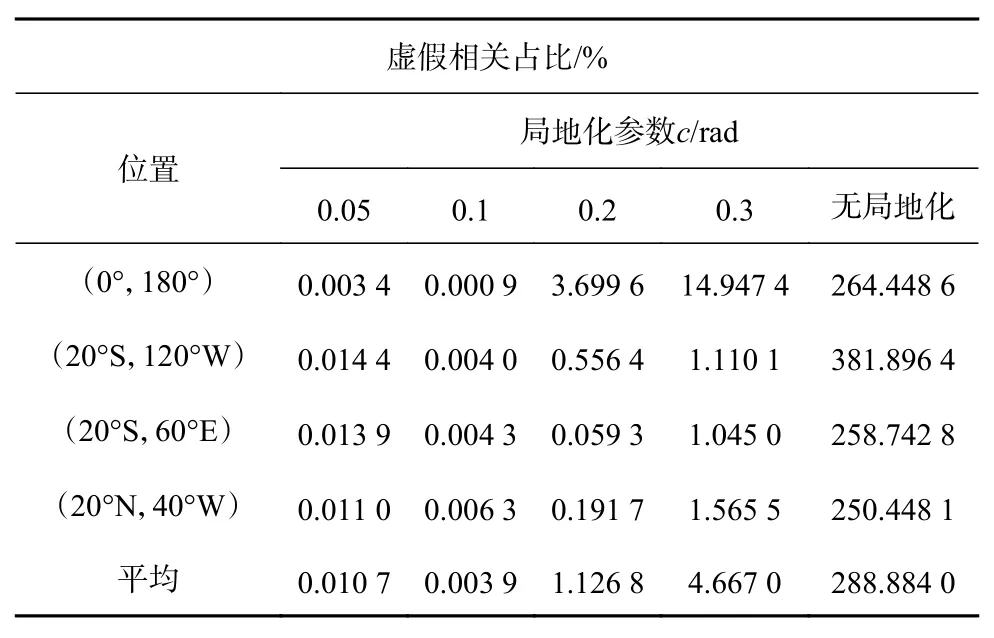
表2 SST相关系数虚假相关占比Table 2 Proportion of false correlation in SST correlation coefficient
3.2 LPF 局地化对同化效果影响
3.2.1 LPF 垂向局地化方案
第3组实验考虑了LPF垂向局地化方案对同化效果的影响,类似EAKF局地化实验,我们首先固定c为 0.1 rad,设置垂向归一化系数ν=500/1000/1500/m/rad。首先,我们从海洋温度和盐度RMSE的垂向分布分析LPF垂直局地化对同化效果的影响。如图5所示,在浅层,当ν=1000/1500/∞m/rad,即对应最大垂向同化距离为200 m/300 m时,LPF的同化效果较好。由式(10)可知,当局地化参数c固定,垂直距离dv较小且固定时,观测点到它能同化到的最远模式网格点的水平距离dh随着v的增大而增大。在较浅的深度,v的值越大就能在水平方向取得越多的观测资料来计算权重,如果不发生退化,就能获得越好的同化效果。而当深度较大时,无论对于温度还是盐度来说,都可以发现关闭垂向局地化的LPF的效果较差,甚至会造成负面同化效果—即同化后的误差反而大于控制实验(例如大于500 m的温度误差)。这是由于粒子滤波器依赖权重的计算和重采样来更新变量,关闭垂向局地化意味着所有层都会根据表层观测计算的权重来重分配样本,这会过度夸张表层观测的影响范围,从而给深层的变量带来错误的更新[24]。综合温度和盐度的实验结果,可以发现当ν=1 000 m/rad,也就是垂向局地化距离为100 m时,LPF的同化效果最好。
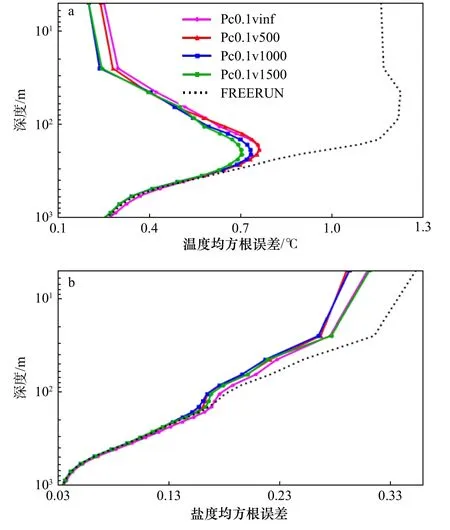
图5 不同垂向局地化方案 LPF 实验中区域平均(60°S~60°N,环地球)垂向均方根误差Fig.5 Regional mean (60°S−60°N,ring the earth) root mean square error in LPF experiments with different vertical localization schemes
3.2.2 LPF 局地化参数
接下来,我们固定LPF最优垂向局地化距离为100 m,分析LPF的不同局地化参数c对同化效果的影响。由式(10)可知,考虑垂向局地化的情况下,为了保持垂直方向的局地化距离为100 m,针对不同的c需要采用不同的ν。图6为采用不同局地化参数的LPF同化SST资料后的垂向RMSE,从图中可以很明显的看出,LPF的效果对局地化参数c非常敏感。当c=0.2 rad时,同化效果非常不理想,这主要是由滤波退化造成的。c的数值越大,越多的观测能同时影响给定点的权重,从而导致该点的权重更容易退化。集合退化会大大降低粒子滤波器的效率,特别地,我们可以发现c=0.2 rad时的盐度没有同化效果。另一方面,当c的数值太小时,由于获取资料过少,无法正确表达状态变量的概率分布密度函数,也会导致同化效果不佳。图7进一步展示了不同局地化参数得到的分析场的表层变量月平均RMSE演变,不同于图3,即使只考虑表层变量,局地化参数对于同化效果也有很大的影响。我们可以进一步确认c=0.2 rad会导致LPF的退化。综合图6和图7的结果,本实验中最优的LPF局地化参数c=0.1 rad。
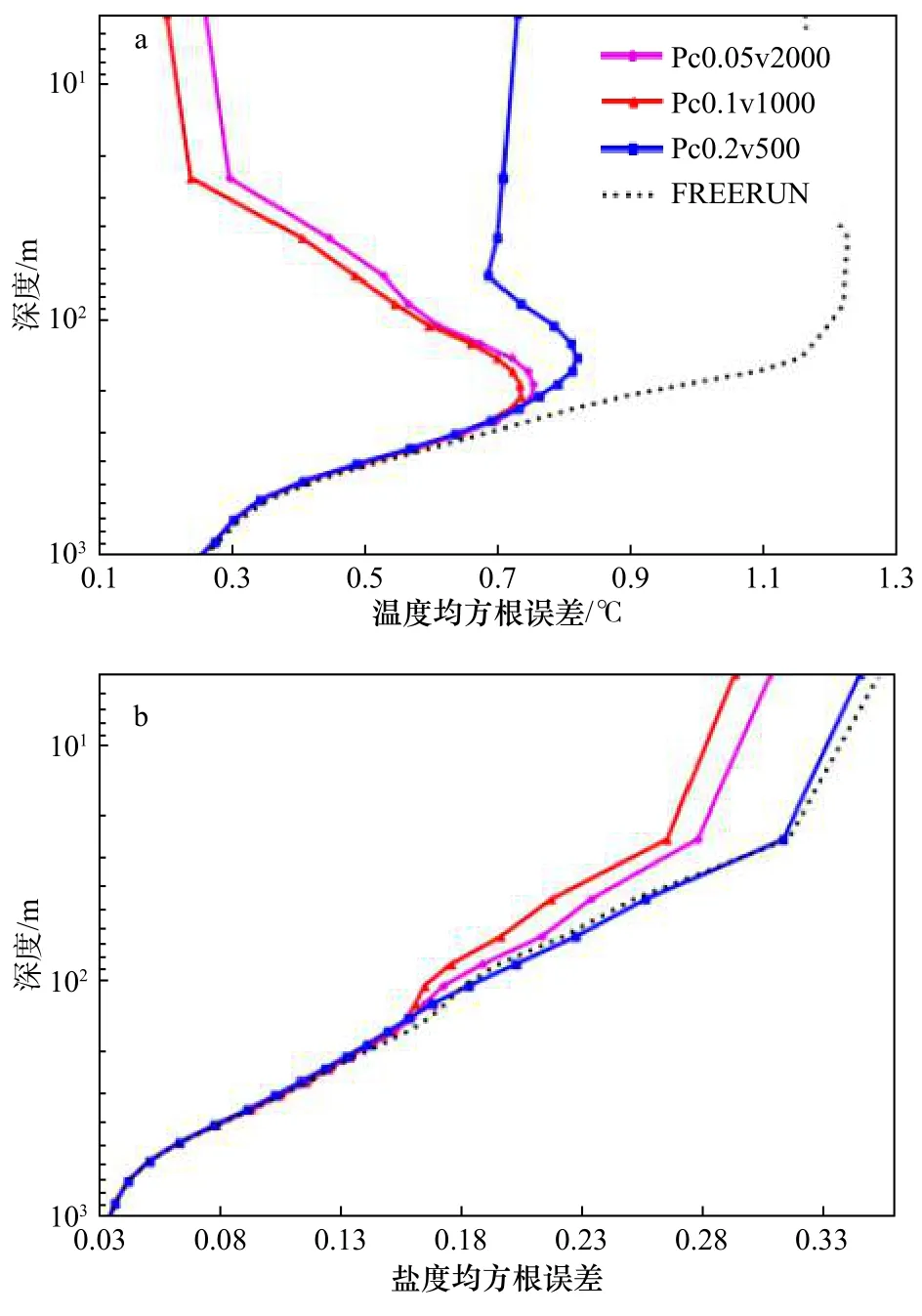
图6 不同局地化参数 LPF 实验中区域平均(60°S~60°N,环地球)垂向均方根误差Fig.6 Regional mean vertical root mean square error(60°S−60°N,ring the earth) in LPF experiments with different local parameters
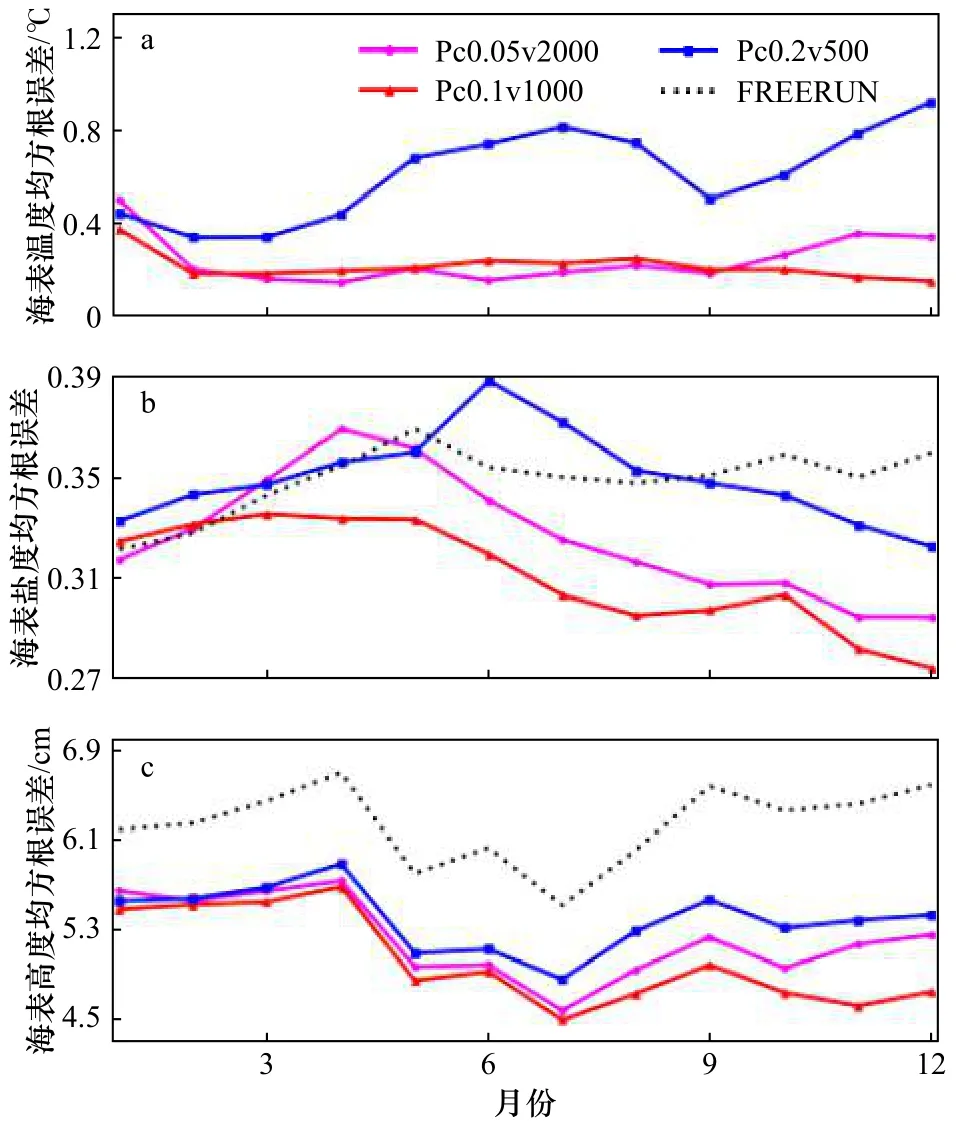
图7 不同局地化参数 LPF 实验中区域平均(60°S−60°N,环地球)均方根误差时间序列Fig.7 Regional mean (60°S−60°N,ring the earth) root mean square error time series in the experiments of LPF with different local parameters
3.3 EAKF 与 LPF 的同化效果比较
最后我们采用最优局地化参数的EAKF与LPF进行对比。图8比较了EAKF与LPF的RMSE垂向分布。从温度RMSE可以看出,当深度小于100 m时,LPF(蓝线)同化效果要优于 EAKF(紫线),但当深度在100~300 m时,EAKF同化效果要优于LPF滤波器。从前面的讨论我们很容易理解这个结果,这是因为LPF需要启用垂向局地化来避免深层的错误更新而EAKF在没有垂向局地化的条件下可以通过相关系数(即使很小)来有效更新深层变量。如果EAKF也使用ν=1 000 m/rad 的局地化,其在 100 m 以下的同化效果和LPF是一样的(红线)。对于盐度变量,LPF的同化效果整体要略优于EAKF,并且在浅层的效果更加明显,这从一方面也说明温度和盐度的关系具有一定的非线性,因而粒子滤波器的表现更好。
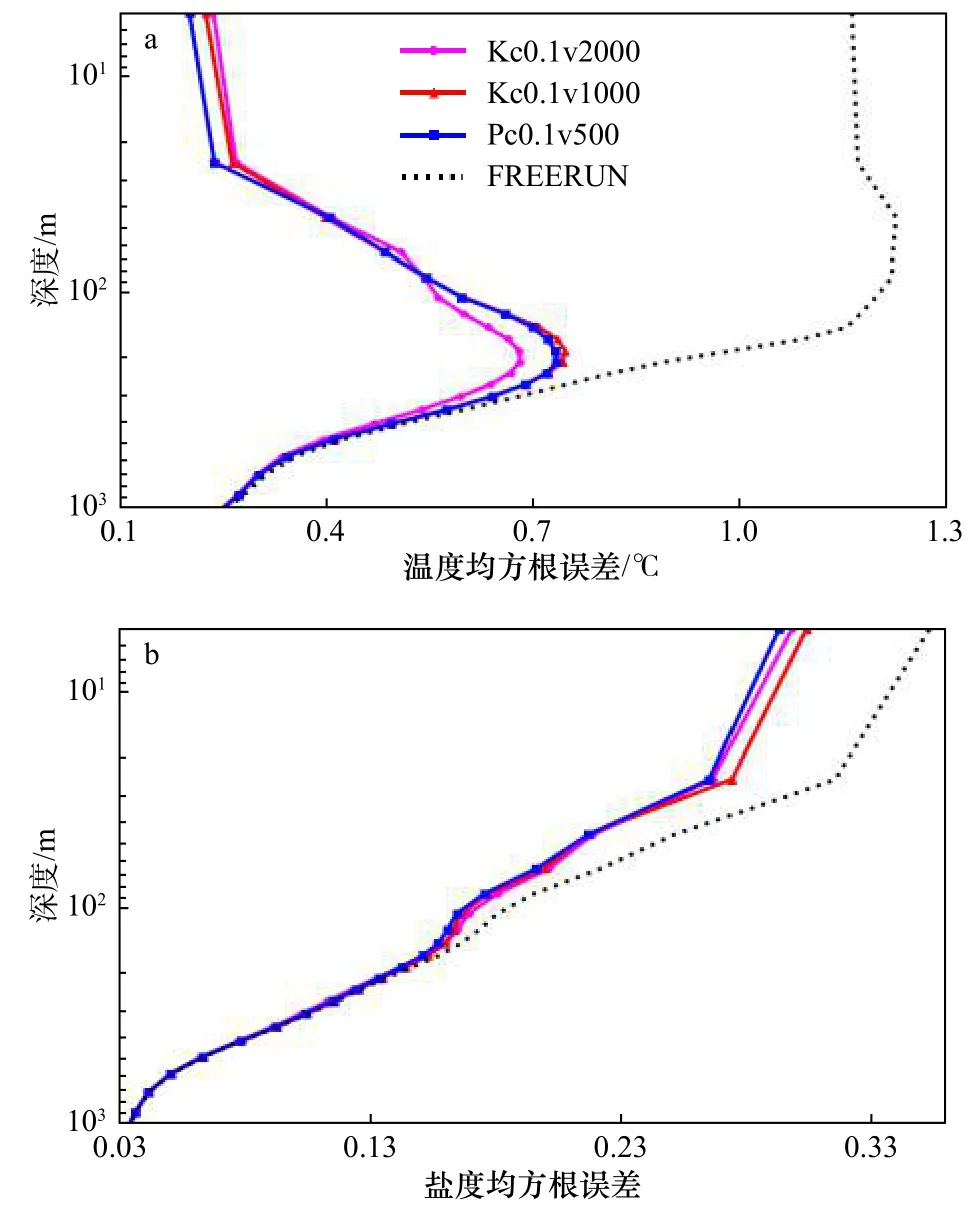
图8 最优局地化参数 EAKF、LPF 对比实验中区域平均(60°S~60°N,环地球)垂向均方根误差Fig.8 Regional mean (60°S−60°N,ring the earth) vertical root mean square error in the experiments of EAKF and LPF with best local parameters
图9为最优局地化参数的EAKF和LPF实验的RMSE之差在海表的空间分布,其中差异由以下公式得到

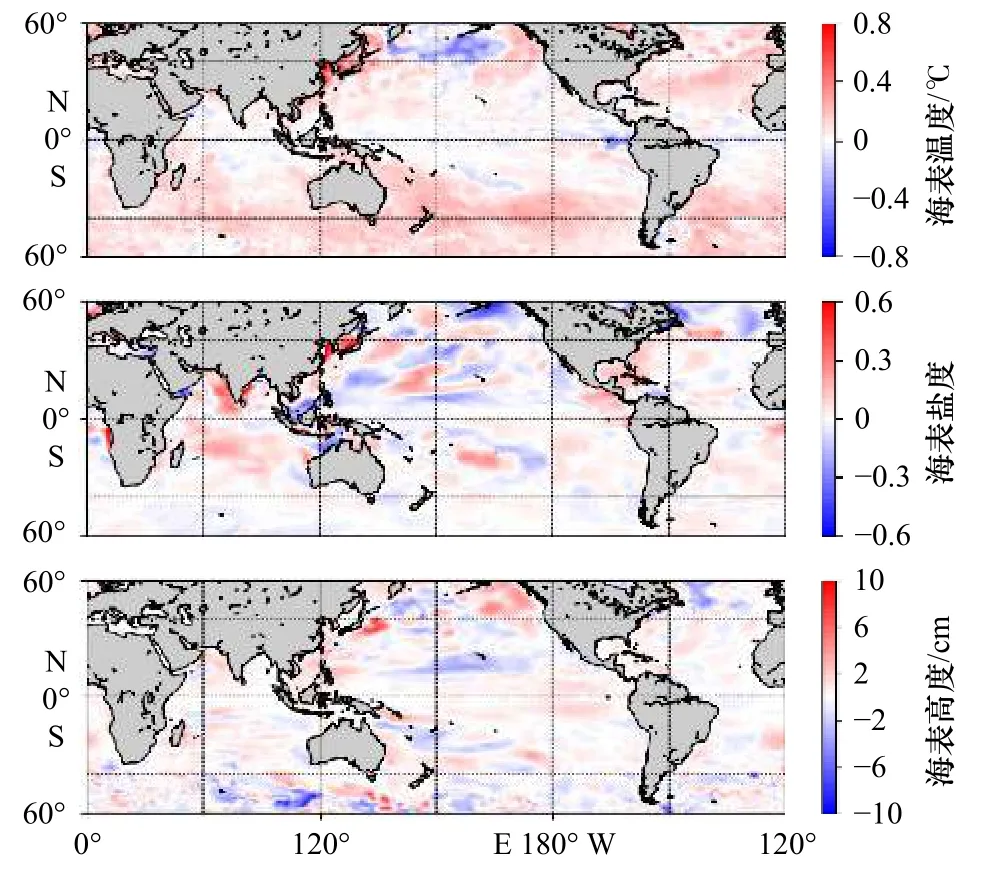
图9 最优局地化参数 EAKF、LPF 实验均方根误差之差空间分布Fig.9 Spatial distribution of the difference between the root mean square error of the EAKF and LPF experiments
由定义,若它们之差大于0,则表示LPF的同化效果优于EAKF;若他们之差小于0,则相反。图中可以明显的看出LPF对于SST的同化效果要优于EAKF,除了北太平洋和赤道东太平洋的小部分区域外,LPF的误差都相对较小。对于SSS和SSH来说,两种滤波器同化效果互相有优劣。在一些典型海区(如印度洋、大西洋),LPF对盐度同化略有优势。而对于赤道太平洋,LPF对于SSH的同化效果更好。我们在表3进一步计算了不同区域的平均RMSE以及同化影响(Influence of Assimilation,IOA)并进行比较。其中IOA定义如下:

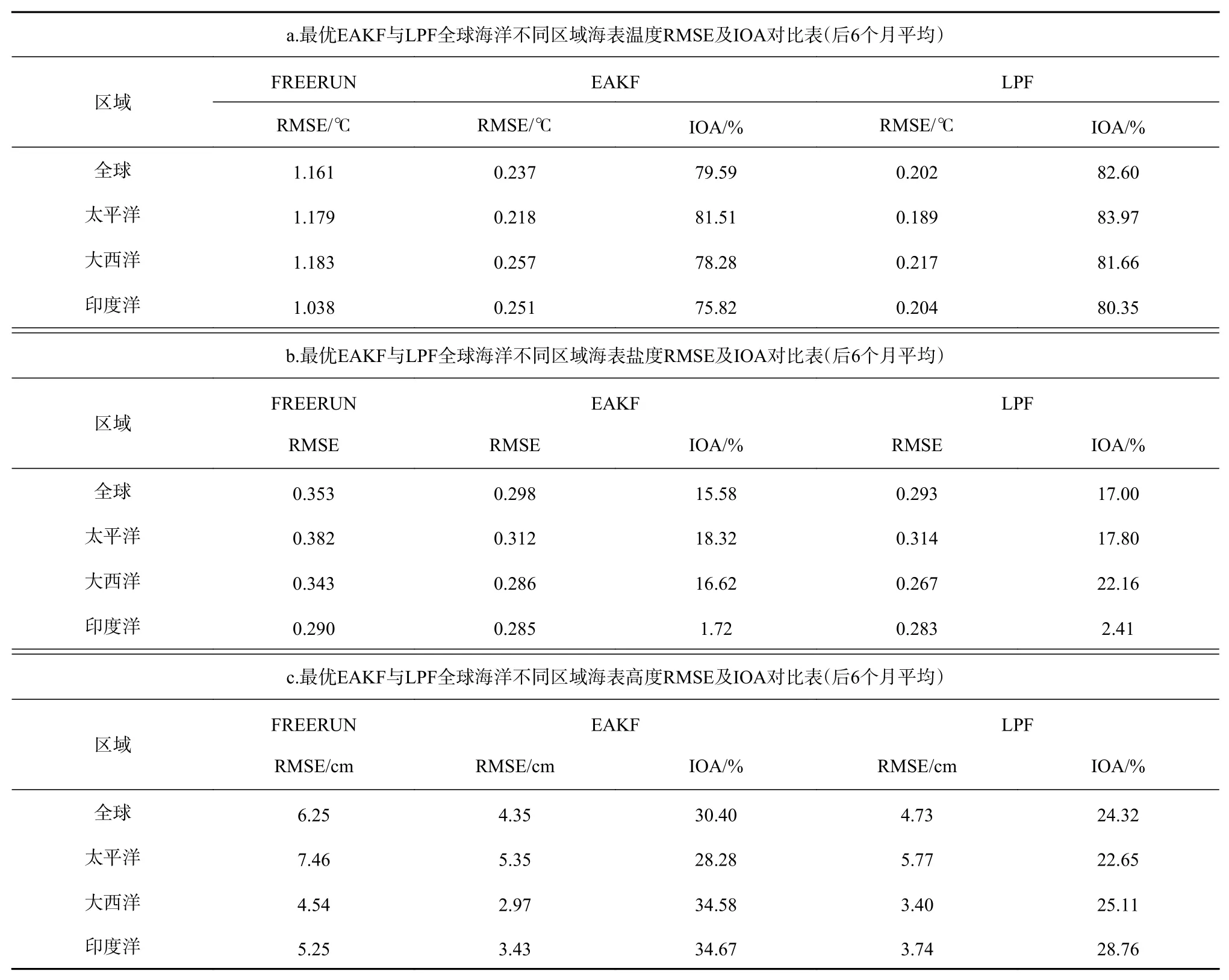
表3 最优局地化参数EAKF、LPF不同区域平均均方根误差(RMSE)、同化影响(IOA)对比Table 3 Comparison table of mean root mean square error (RMSE) and influence of Assimilation (IOA) of EAKF and LPF in different regions
显然LPF的SST同化效果在所有海区都优于EAKF。LPF对SSS的同化效果在印度洋和大西洋的优势也非常显著。而对于SSH来说,EAKF的同化效果全面优于LPF。实际上,我们发现使用集合成员有限的EAKF同化SST对于SSH的改进效果本身就不是非常显著,其结果受到了局地化以外的很多其他因素(如平均动力地形MDT,集合离散度,跨变量相关系数等)的影响,因此还需要更多的研究来进一步解释两种不同同化格式对于SSH的同化效果差异。
4 讨论与展望
本文在大型地球系统模式CESM中开展了SST资料的同化实验。考察了局地化方案和参数对于集合调整卡尔曼滤波器和局地化粒子滤波器两种同化方法的效果的影响,并对两种方法进行了比较。
其中,集合卡尔曼滤波器使用变量之间的相关性来传递观测点的更新量。为此我们提出了一个虚假相关占比公式,对集合样本的相关和真实的相关进行比较,判别局地化对于抑制远距离虚假相关的贡献,并以此为依据选择局地化参数。在垂直方向,我们发现由于深层变量的集合离散度较小,在同化SST资料的时候不需要特别采用垂向局地化就能达成效果。而局地化粒子滤波器基于使用局部观测来决定不同位置变量的权重,并利用重采样方法进行更新,因此局地化参数对于粒子滤波器的影响更大。我们必须谨慎选择局地化参数来避免粒子滤波器的退化,否则会产生负面的同化效果。此外我们也验证了垂直方向的局地化对于LPF是必要的。
选用最优局地化方案的两种滤波器的对比表明,LPF在浅层的同化效果比EAKF好,在较深层,由于垂向局地化的影响,LPF的效果略差于EAKF。由于粒子滤波器在理论上不含高斯分布假设,比较适用于非线性的系统和误差,在实验中LPF对于盐度的变量的同化优势也比较明显。
综上,本文验证了粒子滤波器在全球耦合气候模式中的可行性,强调了有效的局地化策略对于避免滤波退化和改进同化效果方面的重要性。通过与集合卡尔曼滤波器的同化效果对比,我们进一步揭示了局地化粒子滤波器这一种新兴算法在未来具有非常大的潜力被应用于复杂模式的业务化同化系统中。
当前的实验仅考虑了同化SST资料过程中的局地化方案,对于其他的观测资料类型,如温盐廓线资料和海表面高度异常资料,其结论不一定相同。另一方面,当前的工作仅考虑使用20个集合成员进行计算,与局地化相关的结论也有一定的限制。我们将在下一阶段的工作中,进一步考虑使用不同的滤波器对于多源海洋观测资料的同化效果差别以及局地化方案的选择策略,也将进一步尝试不同集合成员数对于同化效果的影响。
