面向低成本GNSS接收机终端的周跳修复策略
2021-12-02戴振东张凯渊刘佩林陈涤非许幼成
戴振东,张凯渊,刘佩林,陈涤非,许幼成
(1. 上海美迪索科电子科技有限公司,上海 200241; 2. 上海埃威航空电子有限公司,上海 200233)
0 引言
随着定位技术和基础设施的不断发展,在高精度算法和地面基站网络的加持下,如今一台搭载着专业天线的测绘级接收机可以在开机后数十秒内达到厘米级的定位精度[1-3]。近年来,随着电子设备制造技术的不断提升,全球导航卫星系统(Global Navigation Satellite System,GNSS)设备朝着小型化和低成本化方向发展,更多的GNSS板卡以及芯片也在不断涌现。相较于测绘级接收机,低成本GNSS接收机终端拥有更加广阔的应用场景,例如智能手机平台、小型无人机和机器人平台等。在这类场景下,轻量化和低成本化几乎是必要条件。但是相较而言,低成本接收机的定位精度远比不上测绘级接收机,其根本原因在于硬件设备所导致的低质量观测。在没有多径的开阔环境下,低成本接收机的定位精度一般在5~10m;而在严重的多径环境下,其定位误差可能达到数十米[4]。
载波相位是卫星定位中十分重要的观测参数之一,具有噪声小、多径误差小等优秀特性,经过模糊度解算后,常用于高精度的定位算法中。但是由于低成本接收机跟踪环路的性能远不如测绘级接收机,因此增加了信号丢失的概率,从而导致频繁的载波相位周跳。载波相位周跳现象的存在影响了其观测的连续性,使得利用载波相位的算法应用更为困难,例如载波相位平滑伪距以及载波相位模糊度解算技术等[5]。利用实时动态定位(Real-Time Kinematic,RTK)或精密单点定位(Precise Point Positioning,PPP)技术,低成本接收机也可以达到分米级的定位精度,但前提是需要很长时间的收敛过程,使其应用场景受到了很大限制[6]。因此,低成本接收机的高精度定位仍然是一个待解决的问题,周跳修复是其中最为关键的技术难点之一。
目前,对于低成本接收机周跳修复算法的研究还不够完善。大多数基于测绘级接收机设计的传统周跳检测及修复算法都对接收机的伪距或多普勒观测质量有较高的要求,从而可以利用这些观测对载波相位存在的跳变进行检测[7-9]。在观测信号的频率方面,也有利用多频观测的周跳检测算法被提出,其性能明显优于单频的周跳检测策略[10-12]。这些算法仅适用于观测质量有保证且周跳发生不是很频繁的测绘级接收机。对于低成本接收机,伪距和多普勒观测的噪声及误差都很大,特别是在一些复杂环境下,接收信号的载噪比更低,进一步降低了观测的质量。因此,研究适用于低成本接收机周跳修复的实际策略是必要的,并且该策略需要在复杂环境下仍具有一定的鲁棒性。
本文提出了一种适用于低成本接收机的双差载波相位周跳修复策略,并且利用载噪比对修复策略的有效性进行了评估。该策略的优势在于考虑了低成本GNSS接收机的观测特性,可以检测并移除无效载波相位观测,具有更强的鲁棒性。
1 双差载波相位周跳修复原理
1.1 双差载波相位观测
在短基线条件下,对载波相位进行双差处理后,可以消除接收机钟差、卫星钟差、电离层延时和对流层延时等观测误差,因此双差载波相位观测可以表示为[13]

(1)

(2)
1.2 高阶多项式拟合的载波相位周跳修复方法


(3)
在静止或低动态场景下,无周跳的载波相位观测可以由高阶多项式拟合的方法进行估计[15]。一段长为L的双差载波相位观测一般利用二阶多项式就可以做到比较精准的拟合,如式(4)
(4)

(5)
其中,[·]表示取整操作。值得一提的是,如果接收机本身存在半个波长的周跳现象,则需要将λ替换成λ/2来计算存在多少个半波长周跳。
2 面向低成本接收机的载波周跳修复策略
对于低成本GNSS接收机,传统基于测绘级GNSS接收机的载波相位周跳修复方法主要存在下述问题:
1)观测时间不稳定。对于测绘级接收机而言,观测量的观测时间间隔可以稳定为1s;但对于低成本接收机而言,例如手机的观测,在实际观测中发现存在观测时间间隔不稳定的现象,例如两次观测间隔为0.999s,从而引入了1ms的观测时间跳变。观测时间的跳变将在实际载波相位中引入跳变,而这种跳变会被多项式拟合法误检测和误修复。
2)卫星坐标也被用于本文提出的周跳修复策略中以计算基站和卫星间的距离,因此星历误差就需要被考虑在内。当星历更新时,由于星历参数的突然变化,引入一个微小的跳变,从而引起误检测和误修复。
对“中国风”歌词本身的研究,多立足于词曲的学术研究又多从意象等文学因素入手,较少研究作品语言。如梅雨恬作品《“中国风”歌曲:传统的现代奇观——对流行歌曲“中国”意象变迁的文本分析》⑤就是从意象入手展开研究。再如赵娟的《互文性与原型的对话:解析“中国风”》中则主要是从文学角度阐述了对“中国风”的看法。
3)由信号遮挡所导致的低载噪比会使得低成本接收机输出无效的载波相位观测。这类无效观测的主要特点是模糊度的估计值没有明显的跳变现象,在时间上也不是常数,从而无法在实际算法中得到应用。传统算法无法检测上述无效载波相位,因此需要设计算法对其进行检测并去除,否则也会引入误修复。
4)多径也可能引入低载噪比,但这种情况下输出的仍为有效载波相位观测。为了充分在复杂环境下利用载波相位观测,就需要有效识别多径导致的低载噪比。
如果考虑流动站存在观测时间的跳变并且忽视噪声和多径,式(1)可以变化为式(6)
(6)
其中,tr为低成本接收机作为流动站的观测时间,并且可能经历跳变;而tb为基站的观测时间。式(6)经过进一步变化可得
(7)

(8)
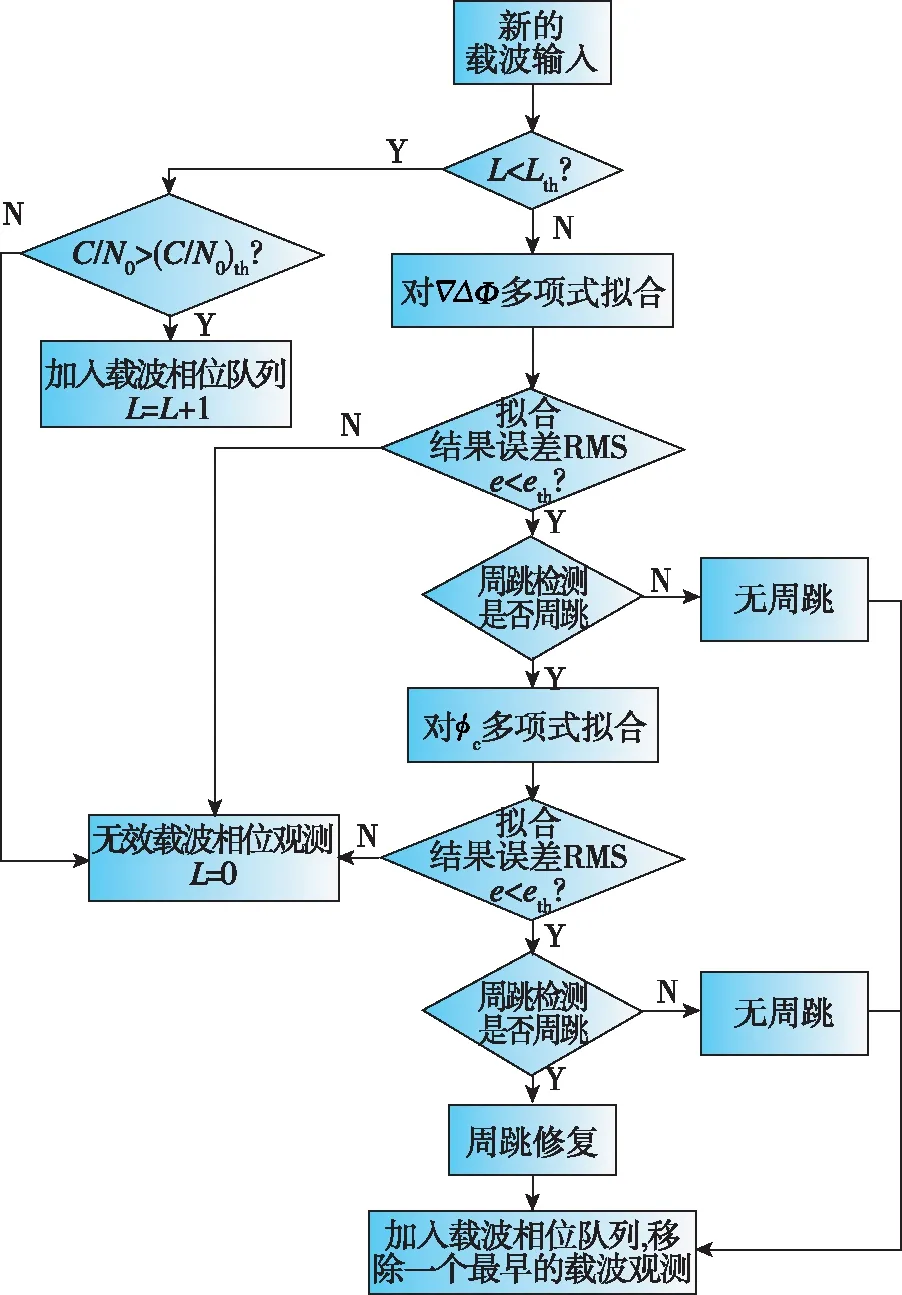
图1 低成本GNSS接收机周跳修复策略Fig.1 Cycle-slip repair strategy for low-cost GNSS receivers

值得一提的是,只有被判断为无周跳或周跳已被修复的观测才被认为是有效观测,而最初加入队列的观测不一定是有效观测量,因此需要用拟合误差进行进一步的判断。只有有效观测才能用于后续的定位算法中。
3 试验验证
3.1 试验环境搭建
通过实际观测对本文提出的载波相位周跳修复算法进行验证。嵌有博通BCM47755芯片的小米8手机和ublox ZED-F9P板卡分别被作为超低成本和低成本接收机的代表进行试验测试,如图2所示。华测B5 GNSS接收机被用作基站提供高精度的多频观测,同时也用于提供厘米级的定位参考坐标,如图3所示。

图2 ZED-F9P接收机以及小米8手机Fig.2 ZED-F9P receiver and MI 8 smart phone
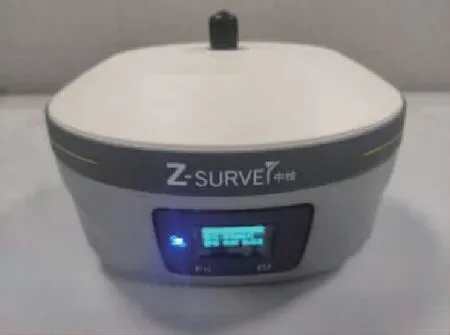
图3 华测B5 GNSS接收机Fig.3 HUACE B5 GNSS receiver

(a)开阔场景 (b)多径场景图4 试验环境Fig.4 Experimental environment
试验分别在开阔场景和严重多径场景下进行,如图4所示,分析的数据包含全球定位系统(Global Positioning System,GPS)和北斗两种星座。开阔场景下周围数百米内无明显产生多径的建筑,观测时间为7604s。在严重多径场景下,接收机北面及西面有明显的建筑物遮挡,观测时间为7400s。通过这种方式可以比较不同的多径环境对低成本GNSS接收设备的影响。
3.2 试验结果
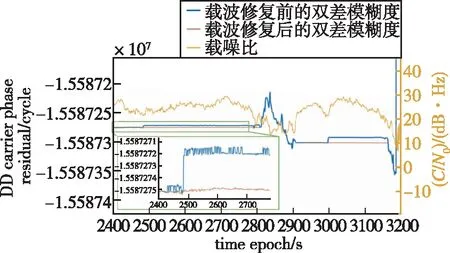
图5 小米8在开阔场景下修复前后的双差载波相位模糊度Fig.5 DD carrier phase ambiguity after and before cycle-slip repair of MI 8 in open sky environment
图5所示为小米8手机在开阔场景下的G30卫星周跳修复前后的双差模糊度估计值,该值由式(2)计算得到,可以反映模糊度随时间的变化情况。在2809~2928s以及3165s之后的时间段,模糊度表现为无规则的变化,表明此时为明显的无效观测,可以发现此时段内载噪比均低于20dBHz,证明了载噪比阈值设定的合理性。在2400~2686s时间段内存在许多半周跳以及一个3周的整周跳现象(绿框内)。在3000s附近存在一个较大的整周数跳变而载噪比也处于局部最低点,表明载噪比较低时容易产生整周跳变。从整个2400~3200s时间段来看,所有的有效观测得到了正确修复,无效观测也被正确检测并移除,不存在误修复的现象。
图6所示为F9P在开阔场景下的周跳修复前后的双差模糊度估计值。与手机观测相比可以发现,F9P的载波相位观测不存在半周跳的现象,且载噪比普遍较高,在40dBHz以上。此外,可以发现F9P的观测中也不存在无效观测,因此所有的周跳都可以被修复。从周跳修复结果来看,两处周跳都得到了较好的修复。
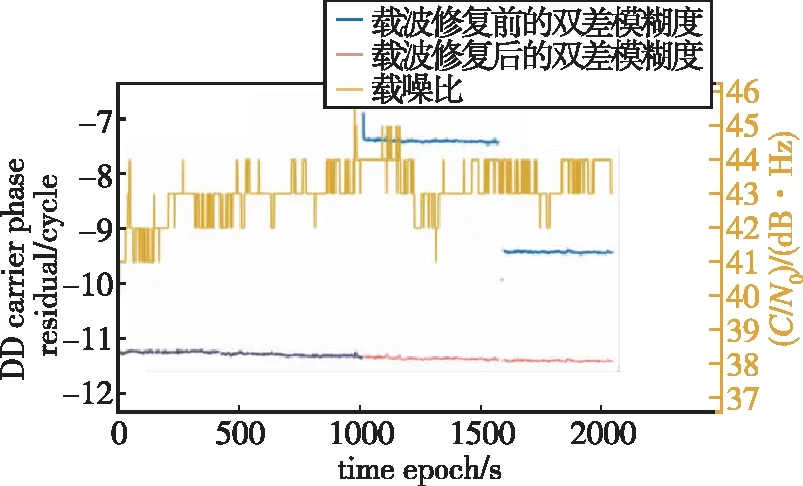
图6 F9P在开阔场景下修复前后的双差载波相位模糊度Fig.6 DD carrier phase ambiguity after and before cycle-slip repair of F9P in open sky environment
表1和表2分别对比了小米8手机和F9P在不同场景下的各类载波相位观测数量以及周跳修复情况,包含GPS和北斗的所有卫星。可以发现,在多径场景下发生周跳以及产生无效观测的概率比在开阔场景下要更高,这是由于多径场景下信号质量较差,载噪比较低,载波跟踪更为困难的缘故。不论是在哪种场景下,本文提出的算法都完全修复了小米8手机以及F9P载波观测中的周跳,但是对于存在的无效观测仍有一定的误修复率。对比表1和表2可以很明显地发现,小米8的观测比F9P观测有更多的周跳和无效观测,其中无效观测的增多尤为明显,这也是因为手机自身平面倒F天线(Planar Inverted-F Antenna, PIFA)抗多径能力差所导致,使得其在复杂场景下的载噪比容易低于20dBHz。相比之下,F9P的载噪比能够时常稳定在40dBHz以上,无效观测较少。但由于本文提出的算法专门基于载噪比和多项式拟合误差来鉴别无效观测,使得手机无效观测的误修复概率明显降低,因此具有实际价值。
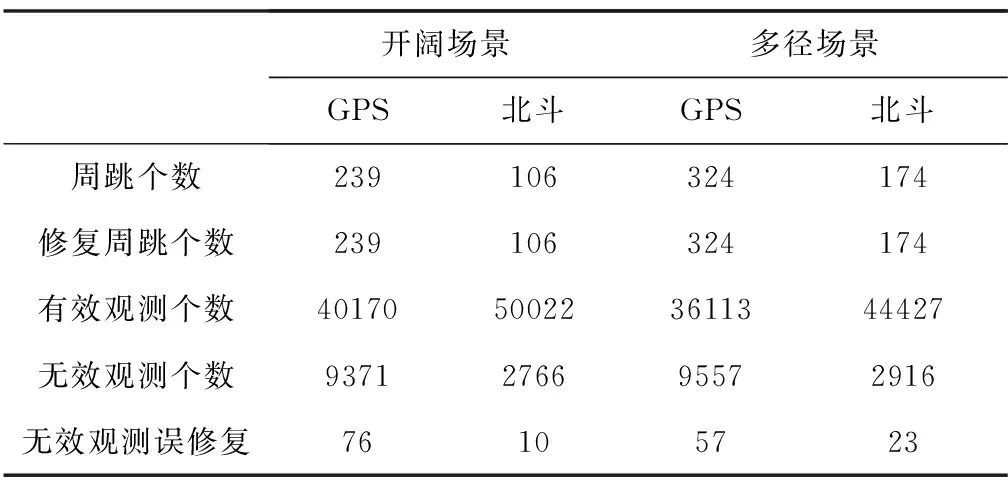
表1 小米8载波相位各类观测数量
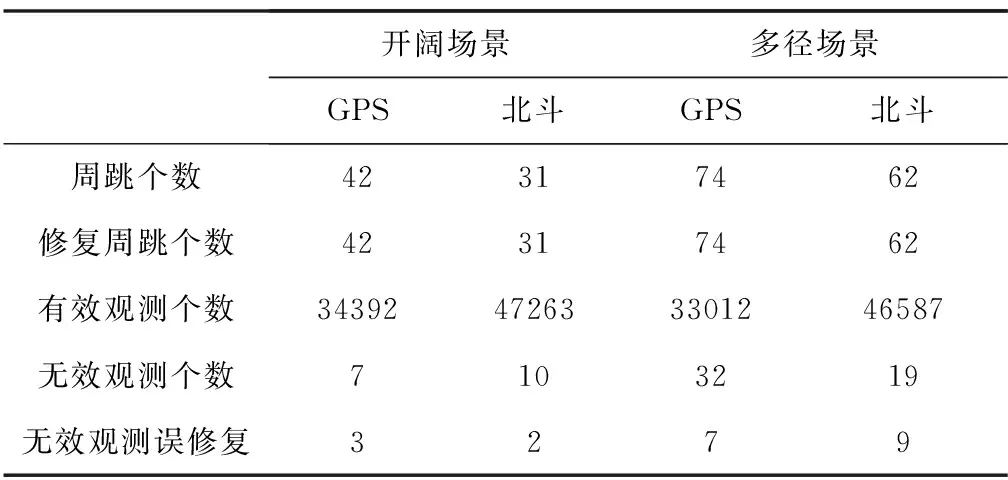
表2 F9P载波相位各类观测数量
4 结论
本文提出了一种面向低成本接收机的周跳修复策略,能够在实际场景下提升低成本接收机载波相位观测的可用性。其主要贡献在于:1)提出了利用联合检测以避免时钟和星历突变造成的误修复;2)提出了利用载噪比和拟合误差检测无效载波观测。基于小米8和F9P接收机在两种场景下的试验结果表明,所提策略可以有效修复周跳并降低手机载波观测的误修复概率,同时也揭示了载噪比在载波质量分析中的重要作用,具有实际价值。在未来的研究中,需要对动态场景下的载波修复策略进行研究,并尝试加入诸如多普勒和伪距等观测辅助载波修复。
