基于ICEPAK的机载有源干扰机的设计与热仿真分析
2021-11-27程阳
程 阳
(中国船舶集团公司第七一六研究所,江苏 连云港 222000)
0 引言
为了尽可能模拟真实对抗环境,新型舰艇作战系统验证试验对复杂电磁环境的需求越来越迫切。机载有源干扰机用于构建反舰导弹导引头和舰载雷达等武器系统的复杂电磁环境,安装在无人机平台使用,产生指定频段内的机载目标模拟信号、压制/欺骗等干扰信号,支撑与各型实装雷达、电子对抗设备和导弹导引头等开展的电子对抗试验[1-4]。对于进一步摸清装备真实作战能力,指导后续装备的整改提升,具有十分重要的意义。
1 机载有源干扰机的组成和工作原理
1.1 机载有源干扰机的组成
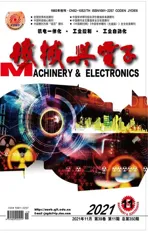
机载有源干扰机由干扰主机、收发天线、功放组件和锂电池等组成,侦收特定频段内的雷达信号,完成信号分选,产生相应频段的机载干扰模拟信号。系统组成如图1所示。

图1 机载有源干扰机系统组成
1.2 工作原理
干扰设备的工作原理如图2所示,干扰设备加电后,处于侦收状态,通过控制接收天线分别接收空域信号,将信号下变频后功分一路中频信号送至数字接收机进行频率测量,并将测频结果发送至数字组件,由其引导频综组件与输入的雷达信号经过混频和滤波等处理后,输出中频信号送至数字组件的DRFM。DRFM根据干扰样式及参数要求,对干扰信号进行时域和频域的调制后输出至发射组件。发射组件将干扰信号与本振信号进行上变频、滤波和放大等处理,输出射频信号至功放组件,功放组件输出的射频信号送至发射天线,最终实现干扰信号辐射[5]。
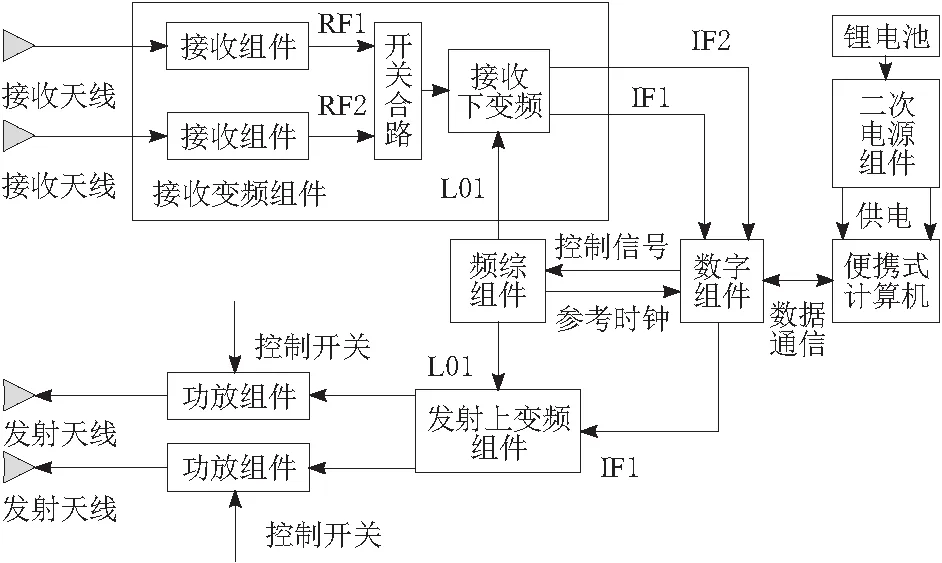
图2 工作原理
1.3 工作模式和流程
机载干扰设备有3种工作模式:自主模式、遥控模式和人工模式。机载干扰设备工作模式及流程如图3所示。
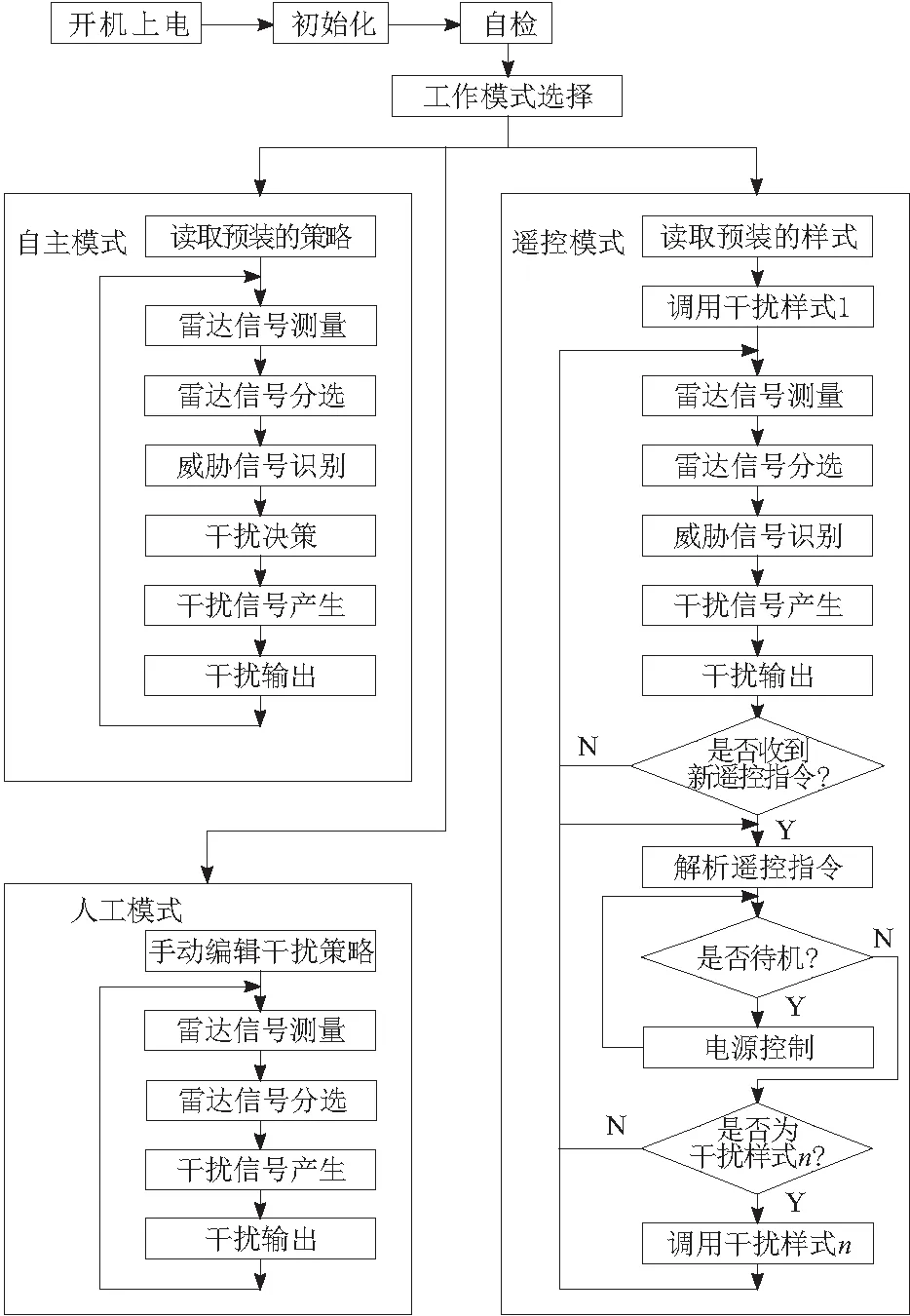
图3 工作模式及流程
a.自主干扰模式。
干扰机对侦收雷达信号进行信号分选和判别,与装订雷达库进行比对,可实现对指定雷达干扰,而对受保护雷达不干扰。
b.遥控干扰模式。
干扰机通过遥控链路控制干扰机加电,然后由地面操作员遥控干扰机自检并回传自检结果,再切换到任务模式。
c.人工干扰模式。
试验时人工改变干扰机工作状态及参数,干扰参数和干扰策略可现场实时编辑。
2 机载有源干扰机系统设计
2.1 接收变频组件
接收变频组件系统原理如图4所示。

图4 接收变频组件原理
接收组件主要完成对输入信号进行限幅及灵敏度控制,保护微波电路,避免大功率输入信号损毁器件。接收下变频模块接收来自接收组件模块的测频支路和变频支路2路信号,变频支路信号与频综信号下变频至中频信号,中频信号经过限幅放大和滤波后送至数字组件,同时产生检波脉冲。
2.2 发射组件
发射组件主要完成将欺骗和压制干扰中频信号上变频到射频,由储频上变频模块、发射开关滤波器组和发射模块3部分组成[6-7],如图5所示。

图5 发射组件原理
其中,储频上变频模块主要接收来自数字储频组件输出的欺骗和压制2路信号,分别经过滤波器、数控衰减器、放大器和调制器后合路输出,与频综信号上变频至射频信号,之后输出至发射开关滤波器组。
发射开关滤波器组接收来自储频上变频模块的射频信号后,经过开关滤波滤除本振和交调杂散,输出至发射模块。
发射模块接收来自发射开关滤波组输出的信号,经过动态数控和发射调制后功分2路输出,一路经过检波比较后作为发射组件故障检测,一路经过放大器和高通滤波器等输出至功放组件。
2.3 频综组件
频综组件主要由晶振、锁相环、开关滤波器和点频源组成,频综组件原理如图6所示。
图6 频综组件原理
频综组件由恒温晶振作为基准信号,经过功分器功分2路后,一路经点频源产生时钟信号,作为数字储频组件的采样时钟信号;一路送入锁相环得到2路频综信号,分别为接收组件和发射组件提供下变频和上变频本振信号。
2.4 功放组件
功放组件均采用固态功放体制,主要由功放模块、电源转换模块和控制模块等组成。发射功放主要功能是将干扰主机送至的干扰激励信号进行放大后通过天线发射出去,原理如图7所示。

图7 功放组件原理
3 干扰信号模拟生成
3.1 数字组件
数字组件组成如图8所示,主要包括DSP、FPGA、高速A/D、高速D/A、存储器及配套电路。

图8 数字组件组成
3.2 信号处理及系统控制
信号处理及系统控制单元接收瞬时测频接收机的全脉冲数据,进行信号分选、测量和识别,确定雷达的载波频率、脉冲宽度和脉冲重复周期等主要参数,用于引导干扰源[8-9]。
信号处理的原理如图9所示。它主要由脉冲参数量化器、全脉冲参数相关缓冲器、信号预处理器、双口存储器、雷达信号处理器、时钟产生器和时序信号控制器等组成。

图9 信号处理原理
接收机对每个雷达脉冲信号进行1次测量,测频接收机提供的接口信号有全频信号VP和PCMD、频率码RF。对视频信号VP进行到达时间(TOA)量化和脉宽(PW)量化,形成的脉冲描述字PDW存入FIFO进行流率平滑,FIFO的输出进行频率一维预处理,删除已知雷达信号和多余的PDW,大幅度降低数据流率。预处理数据存入双口RAM,供高速处理器作信号分选识别用。
3.3 干扰技术
干扰技术可分为时域干扰和频域干扰。时域干扰技术主要是基于脉冲样本存储的干扰技术,将不同的样本信号存储于DRFM的大容量存储器中,并根据干扰要求进行样本读取、处理并转发,形成干扰信号。时域干扰技术原理如图10所示。

图10 时域干扰技术原理
频域干扰技术主要是利用数字频率合成器产生相应的多普勒信号直接转发或调制到雷达信号上去,形成对雷达的移频干扰或多普勒噪声干扰。
数字域实现多普勒调制的方法可以表示为简单的三角函数运算,即
cos[2π(f0+fd)n]=
cos(2πf0n)cos(2πfdn)-sin(2πf0n)sin(2πfdn)
(1)
f0为输入信号载频;fd为多普勒频移,多普勒频移的分辨率为DDS工作时钟除以量化位数。
利用多相DDS和正交变换结构可以得到正交的f0和fd分量,分别进行相乘后相加即可得到多普勒频移信号,运算结构如图11所示。

图11 数字多普勒移频干扰实现原理
通过对雷达信号多普勒调制后转发,能够形成对不同体制雷达的频域干扰信号,影响雷达对目标信号的多普勒检测。
3.3.1 距离拖引干扰
距离拖引干扰是针对敌方雷达发出的信号形成距离门上的相对假目标,假目标相对目标平台呈现一定规律的距离移动,使敌方雷达更容易跟踪上假目标。
DRFM接收到雷达脉冲信号之后,在时域上产生可移动的距离波门。距离波门拖引只要按照时间更新目标的延迟时间,就会形成输出在距离上的按照某种规律移动的目标,从而实现距离波门拖引。多重距离拖引干扰是在不同的时间延迟复制输出多个不同距离的假目标脉冲,在时域上合成。
如图12所示,数字储频接收到雷达脉冲信号之后,在不同的编程时间延迟之后在1个重频周期内可以复制输出1~3个不同距离的假目标脉冲。当距离拖引方式启动时,DSP系统对接收到的拖引参数进行计算,并对FPGA设置初值,然后设置数字储频为直通工作方式,在延迟保持时间后,切换到拖引方式,开始进行拖引。

图12 距离拖引干扰时序
3.3.2 速度拖引干扰
速度拖引干扰是针对敌方雷达发出的信号形成速度门上的相对假目标,假目标相对平台呈现一定规律的速度移动,使敌方雷达更容易跟踪上假目标。产生速度拖引信号时,DRFM首先转发目标回波信号,通过射频直通的方式实现。然后DSP根据公式Δf=2V/λ及速度欺骗干扰信号的拖引规律,计算多普勒频率值,定时对DDS置当前频率控制字,计算当前多普勒频率。
3.3.3 距离/速度联合拖引干扰
单纯的距离拖引干扰对于敌方测距雷达是有效的,当敌方雷达具有速度和距离双重测量功能时,很容易通过距离和速度的相关特性识别干扰。相对应地,单纯的速度拖引干扰也有类似问题。为了实现更好的欺骗效果,常采用距离速度联合拖引方法,满足距离导数等于速度这一相关特性。
在产生距离/速度联合拖引干扰信号时,干扰技术产生器采取距离欺骗和速度欺骗干扰信号各自产生方法,分别对视频脉冲延时产生电路和DDS定时刷新置数。在计算多普勒频率Δf=2V/λ时,此时速度V应根据距离R的信息(V是R的导数)来计算,因此,对视频脉冲延时电路和DDS置数具有相关性。
3.3.4 多假目标干扰
在多假目标干扰模式下,干扰技术产生器产生多路独立运动的假目标。每一路目标分别控制读取延时实现距离控制,同时分别控制多普勒调制频率实现可变载频,多个可变载频的假目标在时域上合成后输出,受数字资源的限制,最多可产生16路独立运动的假目标,如图13所示。

图13 假目标干扰
4 干扰主机热仿真分析
干扰主机是一个较大的热源,主要热量来自功放组件和数字组件中的集成电路芯片以及二次电源。
采用ICEPAK软件进行了热仿真计算,仿真条件为环境温度+60 ℃,自然对流和强迫风冷。设计要求为整机所有器件达到稳态工作时的最高点温度不高于85 ℃。热仿真模型如图14所示。

图14 热仿真模型
仿真风速如图15所示。
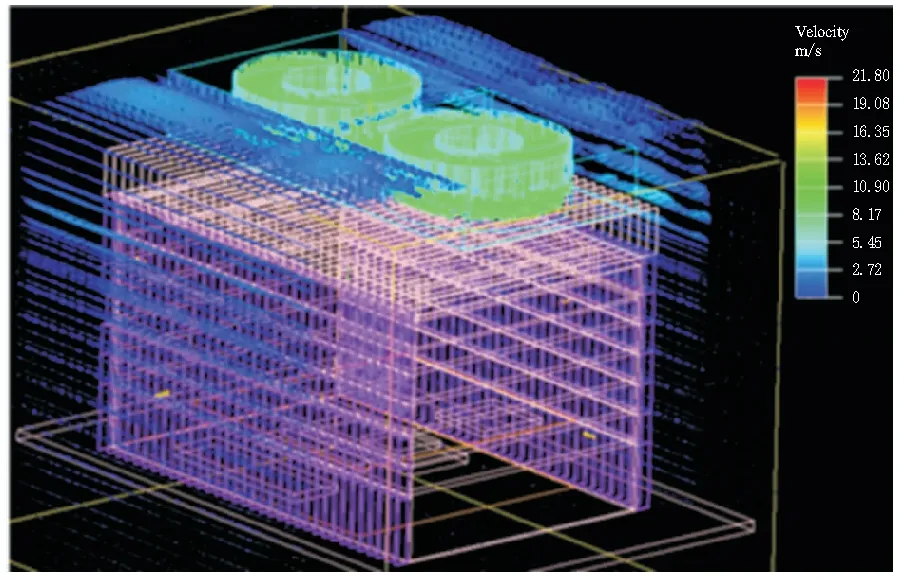
图15 仿真风速
功放组件温度仿真稳态云图如图16所示。
由图16温度仿真云图可以看出,功放组件内部发热量比较大的末级功放部分的温度上升最高,达到79.52 ℃,小于最高温度85 ℃的要求,满足长时间连续工作需要。

图16 功放组件温度仿真稳态云图
电源组件和数字组件主要发热器件温度仿真云图如图17所示。

图17 二次电源和数字组件温度仿真云图
从二次电源和数字组件主要发热器件的温度仿真云图上看,二次电源和数字组件的主要发热器件的温度在79.07 ℃左右,小于芯片工作环境温度85 ℃的要求,完全满足工作要求。
干扰主机温度仿真云图如图18所示。

图18 干扰主机温度仿真云图
从电源组件和数字组件主要发热器件的温度仿真云图上看,电源组件和数字组件的主要发热器件的温度在79.52 ℃左右,小于芯片工作环境温度85 ℃的要求,完全满足工作要求。
5 结束语
本文介绍了机载有源干扰机的工作原理和流程,对系统组成进行了设计。描述了干扰信号生成的关键技术,同时对整个系统进行了热仿真分析,验证了设计的可行性。其原理和技术可扩展到其他干扰机研制领域,可广泛应用于军用装备试验测试领域。