基于FER 融合算法的锂电池SOC 估计及仿真验证
2021-11-19崔本清李少林刘明亮张晨阳魏红燕
崔本清,李少林,刘明亮,张晨阳,魏红燕
(桂林电子科技大学机电工程学院,广西桂林 541004)
0 引 言
锂离子电池具有能量密度高、高功率承受力、循环使用寿命长等优点,被广泛应用在电动汽车、电力系统、航空航天等多个领域[1-2]。为了能够提供准确的续航信息和增加锂电池使用的安全性,精确估计电池的荷电状态非常必要。首先建立完整的电池模型,然后对电池的电压、电流进行测量,利用测量的参数对电池的SOC(State of Charge,SOC)进行估计,该方法的突出优点是成本较低,且通用性好[3]。
文献[4-5]在电池模型的基础上提出了扩展卡尔曼滤波(Extended Kalman Filtering,EKF)算法。该算法使得非线性系统接近线性,将卡尔曼滤波的应用范围扩展到非线性系统,目前已广泛应用于锂离子电池SOC 估计领域。但其容易受到噪声的影响而导致滤波发散,使得SOC 的估计误差变大。文献[6-7]通过利用BP 神经网络的自我修复和自学习能力以及逐渐逼近理想值的能力,对扩展卡尔曼滤波算法的非线性误差进行优化和补偿,减小了EKF 算法对模型的依赖程度,得到了较高的精度。不过神经网络算法的网络结构难以确定,并且需要大量的训练数据,易陷入局部最优值,并不能将预测结果的不确定性表达出来。相关向量机(Relevance Vector Machine,RVM)算法基于概率学习的稀疏贝叶斯理论[8],采用高斯分布获得后验均值和方差,使得具备不确定性表达和管理能力,改善和弥补了神经网络算法的缺点,尤其是对于小样本的预测。
因此,文中提出一种基于FFRLS 算法、EKF 算法和RVM 算法的融合算法——FER 算法,可以在线估计动力锂电池SOC[9]。为了对该方法的有效性和适用性进行验证,研究采用UDDS(市区底盘测功机驾驶循环工况)和NYCC(纽约城市循环工况)两种典型工况的实际测量数据作为对照,对比分析了FFRLS 算法和EKF 算法的联合算法,即FEKF 算法的预测效果和性能。结果表明,文中提出的融合算法克服了FEKF 算法对电池模型精度依赖性强、滤波容易发散的问题,预测精度高,而且适用性强,能快速收敛至理论值附近,满足了目前电动汽车的使用要求。
1 SOC 估计模型的建立
1.1 电路模型的建立
文献[10]中提出的电池复合经验模型相比于等效电路模型,前者具有阶数低、结构相对简单、利于工程实现等优点,且模型中的参数可利用实时采集到的电池数据辨识得到,解决了等效电路模型中的实时性和精确性下降的问题[11]。其表达式为:

式中:yk为电池的端电压;R为电池内阻;I为放电电流;k0,k1,k2,k3,k0为电池模型的参数[12]。
1.2 模型参数辨识
最小二乘法是在计算过程中较为常用的系统在线辨识方法,带遗忘因子递推最小二乘法可有效缓解模型后期因数据增多而使新的数据难以起到修正作用的问题。其在线辨识电池内部参数R,k0,k1,k2,k3,k4的辨识过程为:
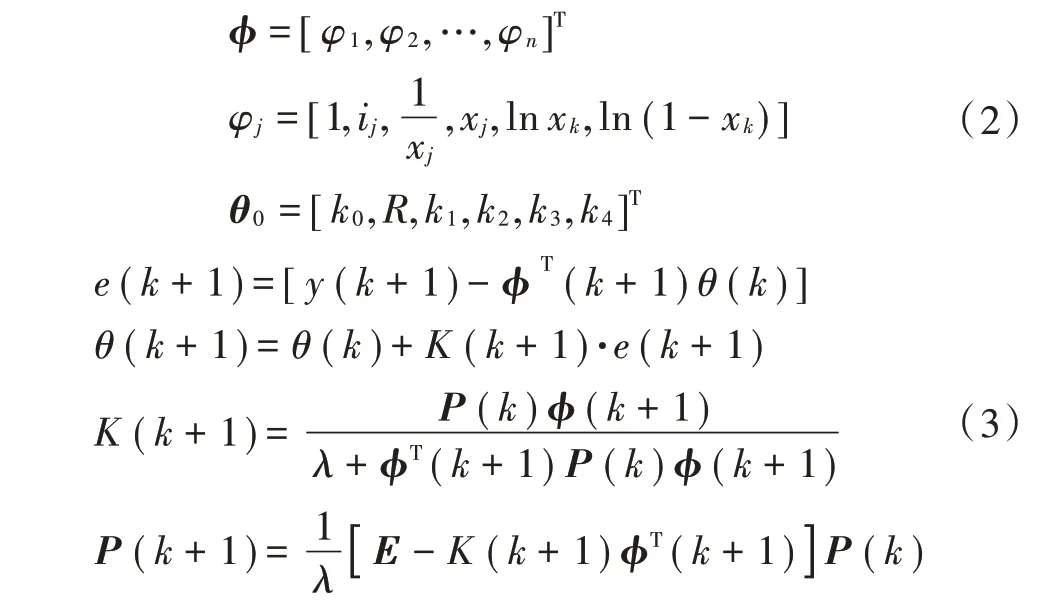
式中:ϕ(k)为观测矩阵;θ(k)为上一时刻所估计的模型参数值;θ0为模型参数初始值;ϕT(k+1)θ(k)是此时刻的观测值;y(k+1)是系统实际的观测值;e(k+1)为系统的预测误差;e(k+1)K(k+1)是对此时预测值的修正值;θ(k+1)为模型参数的后验估计值;P(k+1)为误差协方差矩阵[13]。0<λ<l,一般取0.95<λ<l,λ越小,算法跟踪能力越强,但同时有可能会引起算法的波动,当λ=1 时,即为普通递推最小二乘估计算法。
在启动算法前,必须给出符合条件的θ(0)与P(0),这样才能得到增益项K(k+1),进而启动递推最小二乘算法[14]。一般来说,θ的初始值可任意设定,文中设定θ0=[250,1,1,1,1,1],而P(0)=αE,α尽量取大,E为单位矩阵。
1.3 扩展卡尔曼滤波算法
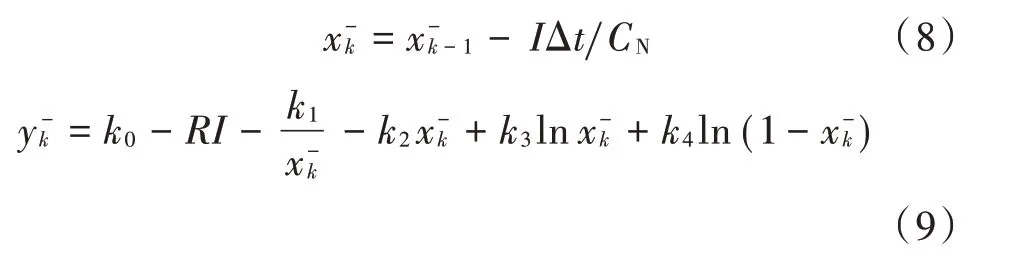
以安时积分法为状态方程,经验模型公式为观测方程,经过推导可得到离散化的状态空间模型[15]:

式中:xk为初始SOC 值;I为充放电电流;Δt为采样时间;CN为电池额定容量。
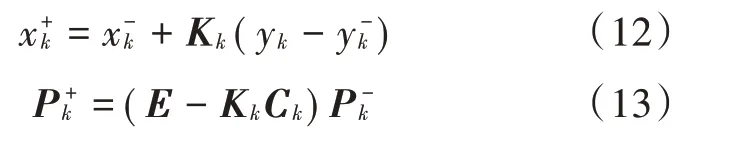
EKF 算法的估算过程如下:

步骤2:对状态转移矩阵Ak和观测矩阵Ck进行求解:
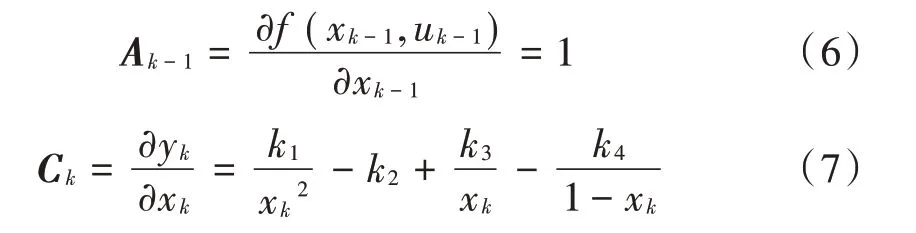

式中Rk为测量噪声方差,其大小直接影响EKF 算法的修正效果。
1.4 建立误差预测模型和测量噪声方差修正模型
考虑到在测量过程中电池端电压及端电流出现的测量误差无法避免,再加上用建立的电池模型对相对复杂的电池动态模型进行描述时,出现的误差也难以避免。因此,需要建立电池模型误差预测模型并借此修正EKF 测量噪声协方差[17]。EKF 算法的测量更新主要依靠模型误差和增益矩阵,为了保证EKF 算法的调节效果和SOC 的预测精度,算法后期用数据驱动的方法代替经验模型,预测测量更新误差。
本次选用RVM 算法作为预测算法,利用前期经验模型得出的模型误差作为目标值,然后对输入端电压和充放电电流进行计算,得到相关向量集;对输入新数据进行预测,输出预测模型误差Ek。RVM 算法是一种数据驱动方法,其优势在于可以进行单点预测,与EKF 算法单点更新的特点一致,并结合增量学习的思想,将预测值当作新增样本集重新进行训练,实时更新相关向量,使样本的特征不会因为样本的累积而丢失,提高预测精度。重新训练是只将相关向量集作为历史样本,大大减小了样本数量,提高了计算的效率。再使用RVM算法进行模型误差预测,结合噪声修正模型,可以准确调节SOC 的状态方程,得到更为精确的结果。
观测噪声协方差Rk是计算增益矩阵的一个重要变量。当模型误差较大时,状态估计主要取决于过程模型,即令Rk等于一个无穷大的值,从而避免了由于较大模型误差引进的状态估计误差;当模型误差比较小时,由测量模型来决定其状态估计,即令Rk等于一个较小的值(例如等于1),对状态估计进行实时校正[17]。

式中Ek为电路模型端电压yk的预测误差。通过判断Ek的取值范围来调节Rk的大小,建立噪声修正模型,使得状态估计的估计精度和收敛速度得到提升,克服了由于模型误差和系统噪声统计特性不确定引起滤波发散的问题。
1.5 FER 融合算法的建立
文中结合FFRLS 算法、EKF 算法和RVM 算法建立了基于FER 融合算法的锂离子电池SOC 估计模型,其估计流程如图1 所示。
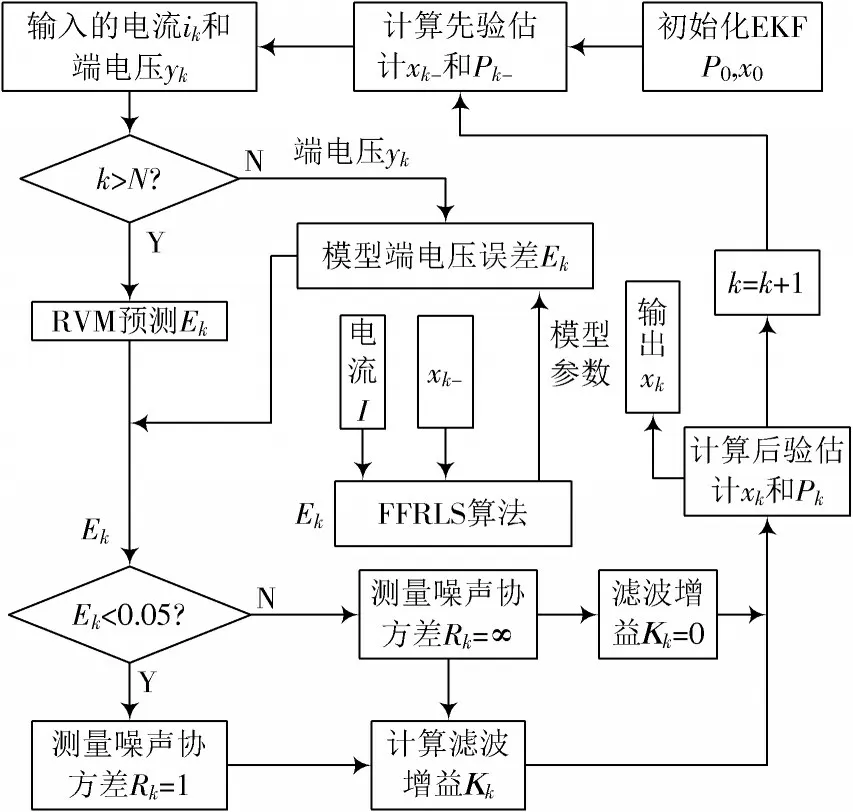
图1 基于FER 融合算法的SOC 估计流程
FER 融合算法的具体流程为:
步骤1:初始化状态变量x0和均方误差P0。
步骤2:EKF 算法先验估计x-k和p-k。
步骤3:如果实时样本数k小于等于训练样本数N,则在经验模型的基础上,对采集到的参数进行辨识,所应用的方法是FFRLS 算法,求出该模型端电压yk的估计值,得到模型误差Ek;如果实时样本数k大于训练样本数N,则利用经验模型得出的结果训练RVM,建立模型误差预测模型,将模型误差Ek的预测值输出。
步骤4:计算增益矩阵Kk,若模型端电压误差Ek≤0.05,则观测噪声方差Rk=1;反之,Rk为无穷大。
步骤6:重复步骤2)~步骤5),直到预测完成,输出SOC 的预测值xk。
2 FER 算法仿真实验
2.1 数据源获取
本次仿真的数据源来自高级车辆仿真软件ADVISOR软件平台,选用gm_ev1_in车型、ESS_L17_temp型号锂离子电池(25 ℃条件下,7.035 A/h)、rint 电池模型,获取UDDS 和NYCC 两种工况下的电压、电流和SOC 的实测数据。
美国的UDDS 工况为小轿车和轻型载货车的行驶工况,NYCC 工况适用于重型载货车,两种工况代表了汽车加速、减速、怠速的全过程。
2.2 电池模型误差分析
图2 为经验模型和经验-RVM 模型在UDDS 工况与NYCC 工况下输出电压误差的对比图。其中,虚线为经验模型估计端电压的误差曲线,实线为RVM 算法通过训练经验模型提供的500 组端电压误差数据,预测得到的端电压误差曲线。
由图2 可知,在两种工况下,经验模型前期估计精度较高,后期估计误差均较大,精度较低,而过经验-RVM模型预测的后期误差均较小,最大值不超过3 V。由此可知,RVM 数据驱动模型有效解决了经验模型后期估计误差较大的问题,提供较为精确的输出电压误差,保证EKF 算法的修正精度。因此,仿真分析选用经验-RVM 模型作为电池模型,使得FER 算法的预测精度得到有效提高。
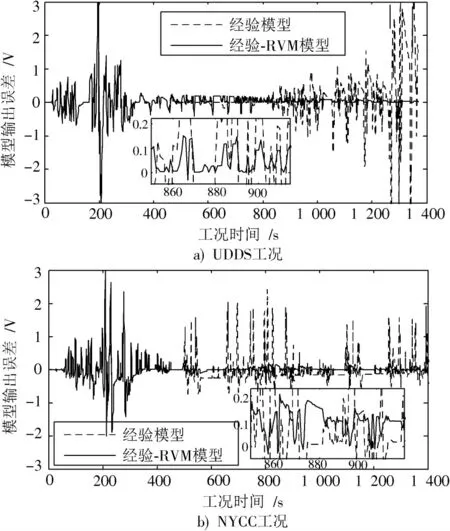
图2 不同工况下两种模型输出电压误差对比图
2.3 FER 算法仿真分析
采用融合算法FER 和FEKF 算法对UDDS 和NYCC两种典型工况下的SOC 进行在线预测,采用最大绝对误差(MAXE)和均方根误差(RMSE)来作为预测效果的评判标准,RMSE 主要评价预测模型的整体性能,而MAXE主要衡量预测模型的局部性能,即:
图3 和图4 分别为UDDS 工况和NYCC 工况下两种算法的仿真结果。表1 为两种工况下FER 算法与FEKF算法仿真结果统计表。图中a)、b)两图的横坐标均为工况时间,纵坐标分别为SOC 和SOC 的估计误差,点划线表示FEKF 算法的估计曲线,实线为FER 算法的估计曲线,虚线表示SOC 的实际测量工况曲线。根据表1数据,两种工况下的最大绝对误差MAXE 均在3%以下,且FRE 算法的误差更小,均方根误差RMSE 的大小表示误差的稳定性,FRE 算法的RMSE 较小,误差曲线较稳定。UDDS 工况相对于NYCC 工况加、减速度较小,工况比较稳定,故预测结果更加精确。综上所述,用FRE 算法对锂电池SOC 进行预测得出的结果有较高的精度,且适用于多种工况,此算法对FFRLSEKF算法的优化效果明显,可以对电动汽车动力锂电池SOC评估预测提供参考。
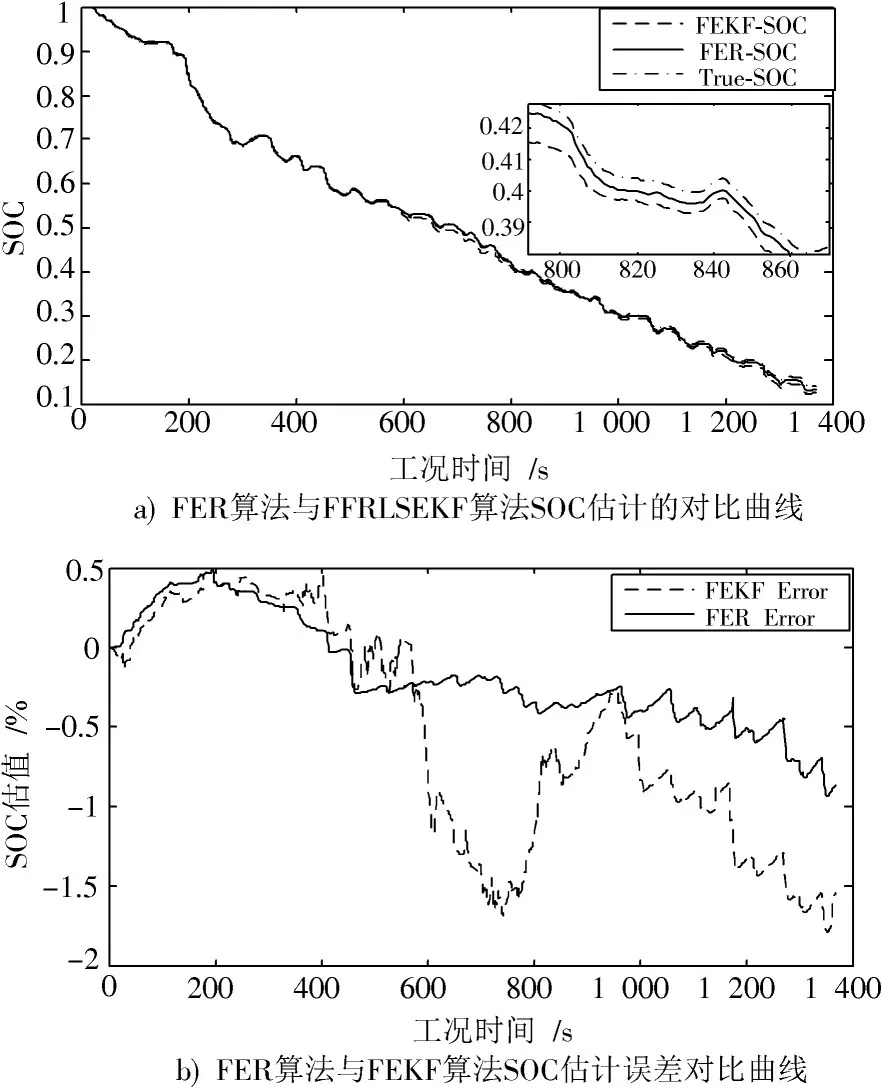
图3 UDDS 工况下两种算法仿真对比曲线
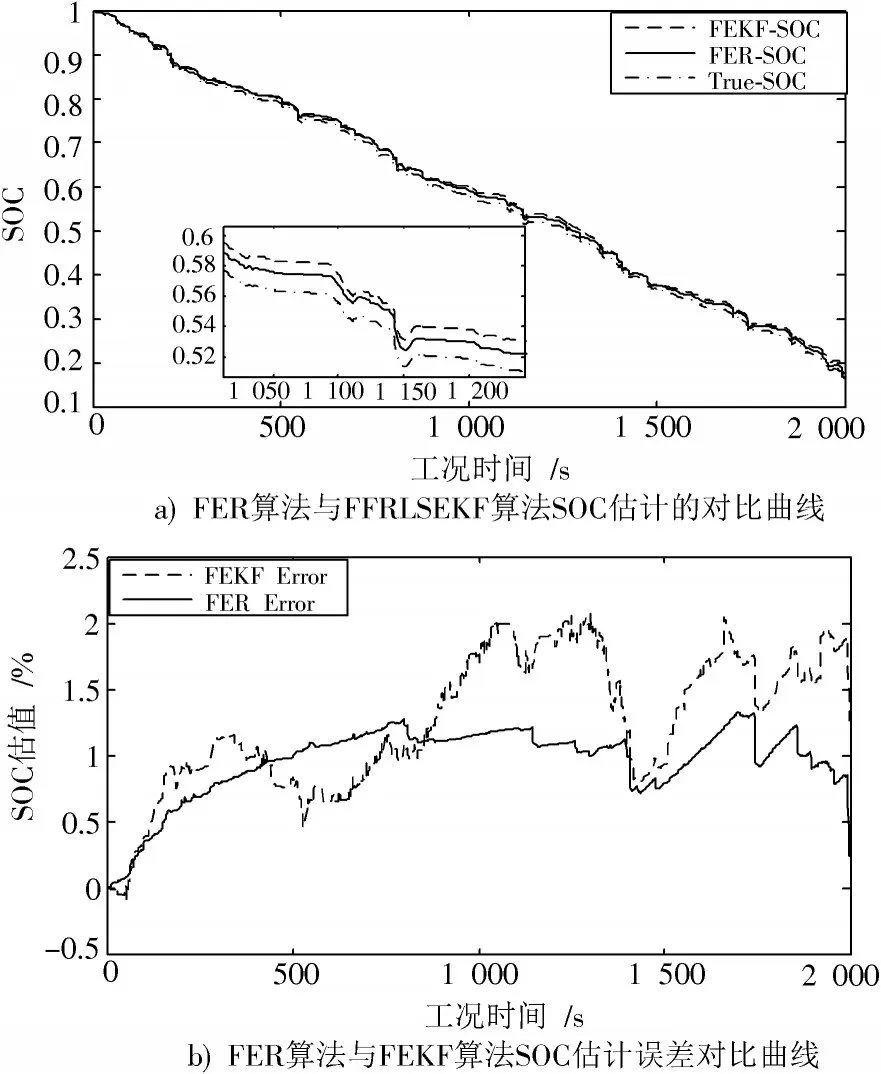
图4 NYCC 工况下两种算法仿真对比曲线
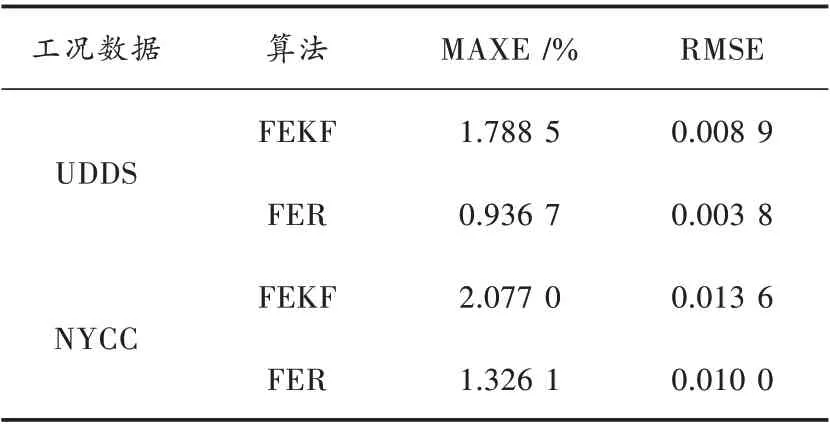
表1 FER 算法与FEKF 算法仿真结果统计表
3 结 论
本文基于一定的电池经验模型,采用FFRLS 算法和RVM-EKF 算法对电池模型参数和SOC 进行在线联合估计,提出一种基于FER 融合算法的SOC 估计算法。预测前期,电池模型的一些参数采用FFRLS 算法在线辨识之后,将模型误差Ek输出;预测后期,使用前期输出的模型误差Ek训练RVM 输出模型误差的预测值,将其作为EKF 算法的后验修正值。对测量噪声R进行了修正,有效地过滤掉模型误差较大的点,保证估计的精度。在仿真计算中,将该融合算法与FEKF 算法进行对比,从仿真结果可以看出,这种算法能使FEKF 的算法精度大大提高,这对预测电池的荷电状态以及荷电状态的应用提供了一定的参照。
