冗余驱动并联机构的性能特征及应用研究进展
2021-11-15李瑞琴亢书华张启升宁峰平
李瑞琴,亢书华,张启升,宁峰平
(中北大学 机械工程学院,山西 太原 030051)
0 引 言
并联机构由于其具有刚度大、精度高、结构稳定、承载能力强等特点,长期以来一直是机构学领域的研究热点.冗余驱动并联机构是并联机构的一种特殊形式,通过增加驱动副的个数,形成运动冗余或者驱动冗余,构型综合的不同能够消除并联机构在某方面的缺点,提升机构性能.相对于传统的并联机构,冗余驱动能改善驱动力分配,提高并联机构的刚度,消除奇异位形,在机构受外力或工作状态下,结构更稳定.冗余驱动并联机构还可以克服传统并联机构灵活性差、关节超限和避障能力差等缺点.在灵巧度方面,这类机构由于冗余自由度的引入,增强了机构的容错性和定位准确性,在航天工程、精密加工和医疗康复等领域具有重要应用价值.另一方面,冗余自由度的引入也引发了许多理论上和工程上的新问题.其中,对运动学和控制等方面的研究已经有较系统的理论支撑.运动学分析作为机构分析的基础,包括位置解、速度与加速度的分析[1].
本文旨在讨论冗余驱动并联机构在构型综合、刚度与稳定性、运动学及动力学以及控制等性能研究方面的新方法以及优化,并探讨冗余驱动并联机构在精密加工、医疗康复以及并联移动等领域的应用.
1 冗余驱动并联机构的构型综合
目前,冗余并联机构的构型设计侧重于提高刚度、增大工作空间、消除内部奇异和提高灵巧性等方面.一般情形下,机构的冗余自由度越多,机构也会具有越大的工作空间和越强的避障能力.本文将冗余并联机构的构型特征归结为两类:带中间支链的冗余驱动并联机构和不带中间支链的冗余驱动并联机构.
带中间支链的冗余并联机构在传统并联机构的基础上添加不同构型的中间支链,可以改变机构的工作空间,消除奇异位形,且可以提高刚度及承载能力.
Li等[2]在3-RSU并联机构的基础上添加了PU中间支链以提高机构的承载能力,该机构用于天线跟踪与定向装置,如图1(a)所示.侯雨雷等[3]提出的3-RSR/SP并联机构通过添加中间支链来减小各支链杆的受力和变形,适用于车载天线,如图1(b)所示.王海芳等[4]、侯雨雷等[5]提出两种构型不同的3-SPS/S冗余并联机构,分别如图1(c)和图1(d)所示,改变不同的中间支链或者运动副的位置得到的机构性能也不相同.这一类并联机构均为带中间支链的冗余并联机构,主要优势是可以改变机构的工作空间,消除奇异位置以及提高机构的稳定性和刚度等.
另一类冗余并联机构主要通过在原有的旁支链上添加新的冗余驱动支链形成冗余并联机构,这类机构在奇异性、灵巧性等方面都有很大的改善.赵福群等[6]提出一种2RP(R)/S-2RPS结构冗余并联机构,通过改变其中一条支链来改善机构的灵巧性,该机构可用于精密零件的加工,如图2(a)所示.覃才有等[7]提出的3-RPS-PRR冗余并联机构可以改变机构无奇异的工作空间.
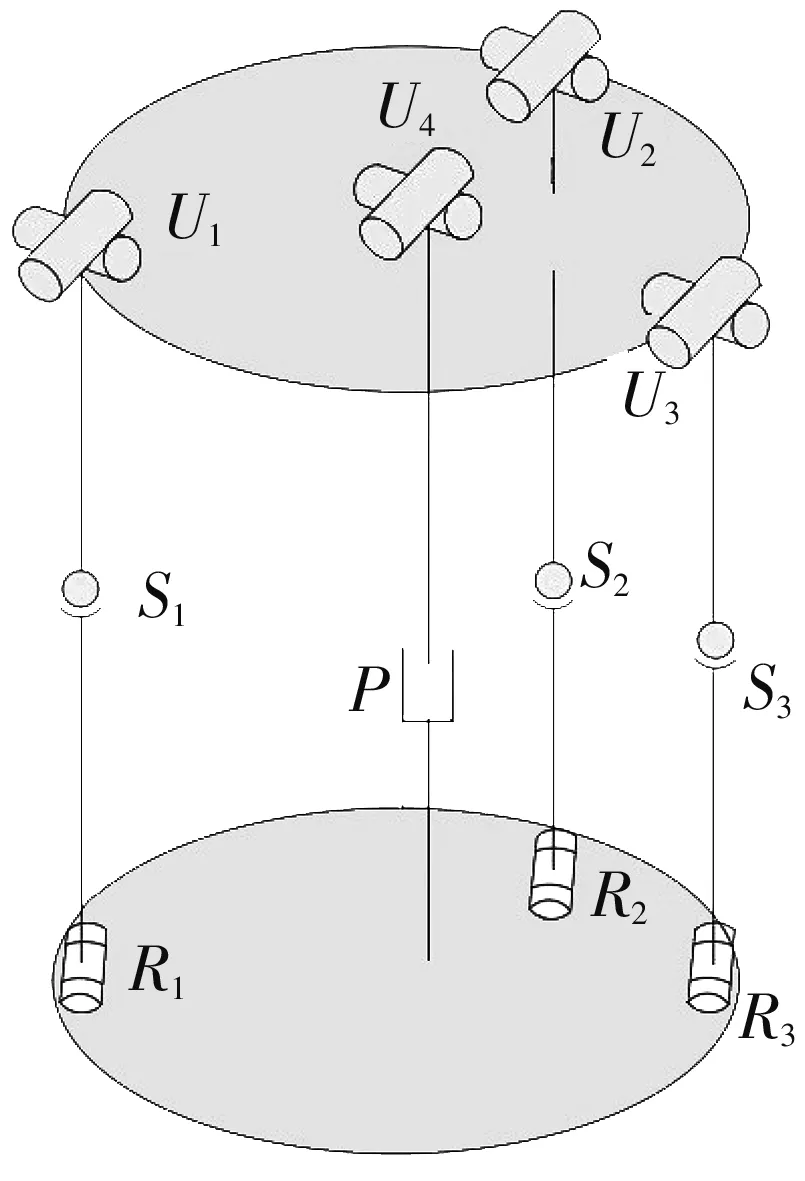
(a)3-RSU/PU冗余并联机构
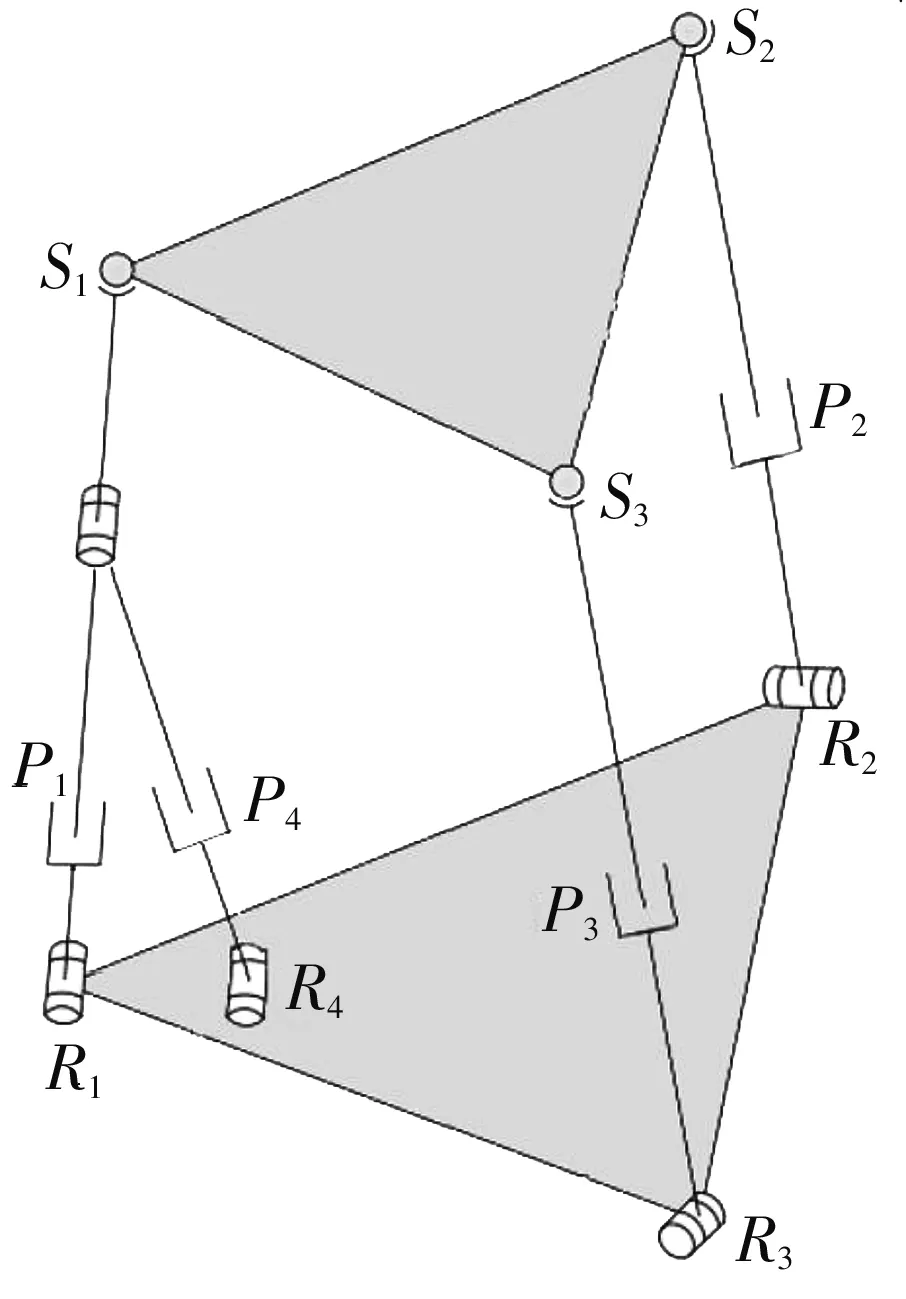
(a)2RP(R)/S-2RPS冗余驱动并联机构
此外,叶鹏达等[8]提出了一种由Stewart衍生而来的6-DOF冗余并联机构,通过二重复合球铰链和特殊的移动副可以改变机构的驱动模式,如图3 所示.王志瑞等[9]提出的18R冗余并联机构被应用于移动机器人,其特殊的结构有利于轨迹规划,如图4 所示.
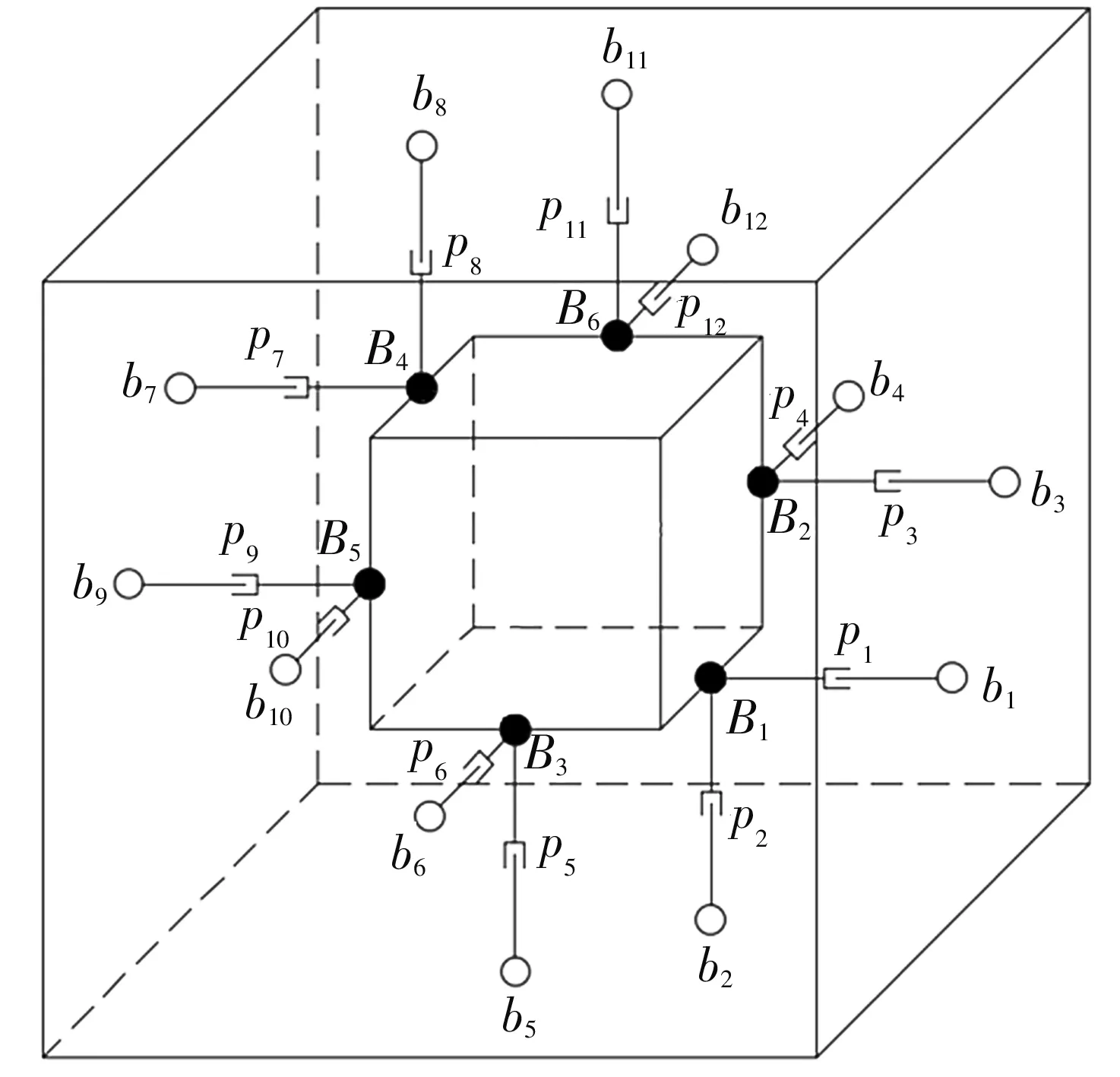
图3 Stewart衍生型冗余驱动并联机构Fig.3 Redundantly actuated parallel mechanism with Stewart derivative structure

图4 18R支链冗余驱动并联机构Fig.4 Redundantly actuated parallel mechanism with 18R limb
根据工程需要,冗余驱动并联机构的构型设计各不相同,但可以根据设计的需要提出一些约束条件即构型的设计原则来减小构型设计的范围.一般来说,在设计冗余驱动并联机构的构型时有三条基本原则:
1)是否满足工作空间要求.工作空间是否达到作业任务要求是构型设计最重要的一点,也是机器人衡量的重要指标.可达工作空间是执行器上某一参考点可到达的所有点的集合.在设计机构时,合理设计各运动副之间的空间关系以及构件的尺寸具有重要意义.
2)是否能够消除工作空间中的奇异位形.机构处于奇异位形时,速度、加速度、自由度以及受力等方面会发生变化,导致机构失去控制.在设计机构时,需要考虑新加入的支链是否能够消除传统机构工作空间中的奇异位形.
3)构型设计是否合理.一般的构型设计主要包括机构、驱动系统和控制系统.构型设计是否合理关系到各个运动副的选择和驱动方式,这对机构的控制特别重要,失败的设计甚至无法安排驱动装置.
2 冗余驱动并联机构的刚度与稳定性分析
刚度是衡量并联机构稳定性的标准之一.冗余驱动并联机构较传统的并联机构多了一个驱动或者一个支链,因此,运动能量的输入显著增加,增加冗余支链,也使得机构刚度更大、稳定性更好.不少学者通过建立冗余并联机构的刚度模型,并与对应的非冗余机构的刚度模型做对比,证明引入新的冗余支链能够提高机构的刚度与稳定性[10-13].在此基础上,一些学者通过改变刚度分析方法,得出了同样的结论.Liu等[14]提出了一种力/运动传递性方法用来分析冗余驱动并联机构,并通过实验验证了该方法有效且冗余驱动能够提高机构的稳定性.Nelson等[15]提出了一种变刚度康复机器人,可以通过改变载荷的大小和方向来实现有效刚度的变化.Ecorchard等[16]提出了一种标定方法,这种方法可以识别刚度参数,并通过实例证明冗余驱动可以提高刚度.
此外,通过串/并联混合形成新的冗余并联机构以可以提高机构刚度.Wu等[17]提出了一种五自由度混合机床,与三自由度的并联机床相比,该机床能够提高机床的稳定性和固有频率.反之,为了满足一定的刚度要求,需要对机构进行优化分析.张双双等[18]提出一种刚度分解规律,通过刚度矩阵差的秩计算需要增加的支链数目.Jamshidifar等[19]建立了受运动约束的冗余电缆驱动并联机器人的通用模型,以刚度优化为目标,探讨了在外部干扰下这些机器人的刚度改善效果和冗余度分辨率,并且在实际仓储机器人上对所建立的模型和提出的冗余度分解方法进行了实验验证,以使其平移刚度达到最大.
但是,并不是所有的冗余并联机构都能提高刚度,Schreiber等[20]提出了两种具有运动冗余的平面并联机构:2(RPR)-2(RPR)R和2(RPR)-R2(RPR),这两种机构由于增加了被动关节而降低了机构的刚度.在实际工程应用中,还需要考虑多方面的条件来选取合适的冗余并联机构以满足刚度要求.
3 冗余驱动并联机构的运动学分析
运动学研究是冗余并联机构从一种特定结构的空间几何体成为运动可控的机构的关键一步.研究的内容包括位置分析、速度与加速度分析等.
3.1 冗余驱动并联机构的位置分析
冗余并联机构的位置分析主要是运动学正解和逆解的分析.并联机构的逆解容易获得,正解不易获得.由于冗余支链的增加,冗余并联机构的正解求解难度更大.目前,求解位置解的方法主要有两种:数值法和解析法.
数值法理论上能求出机构的所有解,但前提是机构位置约束方程可消元至一元高次方程.解析法根据所用数学方法的不同分为矢量代数法、几何法和四元素代数法等.这种解法的解析式在后续工作中还有很多应用且能够得到所有解,但是难度很大,而且由于冗余并联机构结构的特殊性,难度要比传统机构大很多,方法也没有通用性.由于冗余并联机构的自运动,导致机构的位置逆解有无穷多个,因此,需要一种新的方法来求解于位置解.从几何代数的方法考虑,Park等[21]采用共形几何代数法求解了位置逆解,并利用冗余度得到了逆解的最优解.Kim等[22]采用共形几何代数法对3-SPS/S冗余并联机构进行了分析,在获得位置逆解的最优解后,还进行了几何奇异性的分析.李万真[23]根据共形几何代数对3-RSR/SS并联机构进行分析,得到位置逆解和位置正解后,讨论了该机构产生运动奇异的机理.
Yang等[24]采用数值法求解了8-UPS并联机构的位置解.李云峰等[25]、贺磊盈等[26]、赵福群等[27]通过解析法求解了冗余驱动并联机构的位置解.胡小亮等[28]针对4-PRR冗余并联机构求解了一阶影响系数矩阵,通过一阶影响系数矩阵求得速度雅可比矩阵.
此外,Morell等[29]、Zaplana等[30]利用计算机数值分析方法进行求解,这种方法只需建立简单的模型,寻求合适的迭代初值便可求得位置解,大大减少了计算量.
求解位置解作为运动学分析的首要任务对后续工作有重要意义.对于冗余驱动并联机构,现有位置解的求解方法没有通用性且过程复杂,需要进行优化分析.共形几何代数作为一种新.的分析方法,在平面并联机构[31-33]、空间并联机构[34]中的应用较多且效果良好,能够简化运算并且具有清晰的物理意义,但是,在复杂的冗余驱动并联机构中还没有较多应用.将几何代数引入冗余驱动并联机构的运动学分析过程或许是一条新的思路.
3.2 冗余驱动并联机构的奇异性分析
对于冗余驱动并联机构,奇异性的研究主要是如何避免奇异位形的研究.Wen等[35]设计了一种能够再现下颌骨运动的咀嚼机器人,通过引入冗余自由度来消除机构工作空间中的奇异位形.Schreiber等[20]提出了一种轨迹规划算法来对两种冗余驱动并联机构进行分析,也是通过引入冗余自由度来消除奇异位形.王晓明等[36]通过改变机构杆件的尺寸来避免奇异位形.
对于奇异性的分析,大多数学者还是延续了并联机构的分析方法,主要有几何法和解析法两种.几何法得到的物理意义明确,解析法容易获得全部奇异位形,因此,如何将几何法和解析法结合也是目前并联机构奇异性研究的主要任务之一.此外,根据目前共形几何代数在奇异性方面的研究得到,结合机构的几何特征并通过轨迹规划可以获得机构的奇异位形.因此,奇异性的分析还需要进一步研究,简化运算或者提出一种具有实际应用价值的分析方法具有重要意义.
3.3 速度与加速度分析
速度和加速度的分析是并联机构运动学的基础.对于冗余并联机构,分析速度与加速度的方法通常有求导法、矢量法、环路方程法以及影响系数法.求导法为最基本的方法,只需要对上节提到的位置方程求导便可求得.赵福群等[6]针对2RP(R)/S-2RPS使用求导法建立了速度输入与输出方程以及速度雅可比矩阵.雅可比矩阵在运动学分析中贯穿始终,如奇异位形、尺度综合等.值得注意的是,通过建立雅可比矩阵(一阶运动影响系数矩阵)和海塞矩阵(二阶运动影响系数矩阵)而形成的方法即影响系数法,是一种分析冗余并联机构的有效方法.求解速度与加速度的方法各有千秋,需要根据构型设计选择合适的方法,对于构型复杂的冗余并联机构,使用影响系数法能体现出该方法的优越性.
4 冗余驱动并联机构的动力学分析
冗余并联机构的动力学分析主要包括动力学模型的建立、驱动力分配、动力平衡等方面.动力学的建模是动力学特性研究的基础,同时也是实现高精度控制的前提.对于冗余并联机构,建立动力学的模型会由于冗余力的原因而变得非常困难.常用的建模方法有牛顿-欧拉法、凯恩法、拉格朗日法以及虚功原理.
牛顿-欧拉法能够表达明确的物理意义,且求解效率相对较高.Jiang等[37]通过牛顿-欧拉法建立了冗余并联机床的简单动力学模型,用于计算各运动链的变形.李研彪等[38]根据牛顿-欧拉法建立了5-PSS/UPU冗余驱动并联机构的动力学模型,得到驱动力与外力之间的联系.凯恩法可消除方程中的内力项,推导过程比较系统.鹿玲等[39]、窦玉超等[40]通过凯恩法建立了冗余驱动并联机床的动力学模型.拉格朗日法是一种形式简单、建模规范、通用性强的建模方法,尤其对于自由度少、构件少和运动简单的机构更有效.该方法通过推导动能和势能方程以及等效广义力,便可建立动力学模型.陈修龙等[41]、Thanh等[42]应用拉格朗日法建立了冗余并联机构的动力学模型,并通过验证表明该法切实有效.虚功原理可以直接用雅可比矩阵和惯性矩阵来确立关节驱动力和加速度之间的关系,因此,虚功原理在算法上有一定的优势,张东胜等[43]在对5-DOF混联冗余机构运动学研究的基础上,利用虚功原理建立了该机构的动力学模型.
此外,还有一种概念清楚、推导简洁有利于编程的方法,即影响系数法.黄真等在其高等空间机构学著作[1]中给出了详细的建模过程.建模过程与机构运动无关,建模过程和公式变换大大减少了计算量.马金玉等[44]、Zhao等[45]使用影响系数法建立了冗余并联机构的动力学模型.
此外,还有螺旋理论(戴建生[46])、Udwadia-Kalaba法(Sun等[47])、迭代矩阵法(王启明等[48])、KED法(Mehta等[49])、自然正交补法(申浩宇等[50])等方法.建模的对象和方法不同,其建模的难易程度也不同,所以在建模时还需要根据机构特点选择合适的方法.
5 冗余驱动并联机构控制系统研究
由于冗余并联机构的结构复杂,所以实现高精度控制的难度要高于传统并联机构.
按照目前的研究,主要有三类控制方法:基于运动学模型的控制、基于动力学模型的控制和力/位控制法.基于运动学的方法通过运动学位置解方程可以获得运动学模型.该方法中控制器的设计方法相对简单,但是得到的精度一般不能满足要求,需要进行优化设计.常用的基于运动学的控制器有非线性控制器、神经网络控制器等.Yang等[51]、吕有界等[52]在运动学模型的基础上提出控制策略并进行优化,得到的控制系统能够满足要求.
相对基于运动学的控制方法,基于动力学的控制方法更加成熟,它考虑了机构运动过程对控制性能的影响,控制器可以补偿非线性动力学因素,因此,设计出的控制器可以满足更高的精度要求,如PD控制器、增广PD控制器等.龙亿等[53]、刘晓飞[54]、Müller等[55]、Shang等[56]在这方面都进行了研究,得到的控制系统可以提高控制精度.
力/位控制法是一种基于运动学和力学的控制方法,该方法可以改善驱动支链之间的协调性,提高控制精度,减小误差.刘晓飞等[57]、Wen等[58]在这方面均有研究.
学者们在这三种基础的控制方法上进行了优化设计以及容错控制的研究.张耀欣等[59]对平面二自由度冗余驱动并联机构进行了动力学的分析,采用最优控制法对速度和位移进行控制,以此来完成控制器的设计.闫彩霞等[60]研究了利用冗余自由度进行驱动器故障容错和关节故障容错的方法.
近几年,容错控制理论逐渐成为控制理论研究中的热点,这对机构控制的故障诊断以及结构故障诊断都有重要意义,但是,冗余驱动并联机构的控制在优化控制器、控制精度、容错控制以及鲁棒性方面的研究较少,因此,这些方面还需要进一步研究.
6 冗余驱动并联机构的应用
随着冗余驱动理论研究的逐渐深入和不断完善,冗余驱动并联机构也被应用到了并联机床、康复机器人、移动机器人等设备中.
6.1 并联机床
根据冗余并联机构构型设计的机床具有自由度多、刚度大、无奇异位置、灵巧性好等特点,而且这种机床的加工效率更高.Jeon等[61]研制的Eclipse-II并联机床工作台能够转动90°,实现五坐标机床的功能.Wu等[17]、鹿玲等[39]、赵永生等[62]在这方面都有研究.混联冗余机床在工作空间、奇异位置等方面有更大的优势.因此,冗余并联机构在未来机床中一定会得到更广泛的应用.
6.2 康复机器人
近年来,冗余驱动并联机构在医疗康复等领域应用效果显著.例如,借助灵巧性好和精度高的冗余驱动构型可以精确地定位患者伤处,借助冗余并联机构的多自由度构型,还可以进行人体多关节的康复训练,其中,康复机器人不仅能够降低康复训练师的工作,还可以帮助患者锻炼肌肉,提高肌肉的活性.温海营等[63]设计出了一种冗余驱动并联机构能够再现下颌运动,该机构可用于牙科义齿性能测试.Chisholm等[64]设计了一种虚拟步态康复机器人ViGRR,它能够作为一种触觉装置用于人体康复训练,以改善下肢功能.
刘海涛等[65]设计了一种3-DOF冗余驱动下肢康复并联机器人,与传统的下肢康复机器人相比,该机器人在其工作空间内具有较好的力/运动传递性能.李剑锋等[66]设计了一种踝关节康复机器人,该机构使用了冗余驱动,能有效地避免奇异性并增大有效工作空间,还可以减小机构的占用体积.
此外,刚性的外骨骼机器人还不能很好地实现人机融合,因此,刚柔耦合的外骨骼机器人又成为当今康复机器人领域研究的热点之一.Li等[67]基于并联机构,设计了一种混联式踝关节康复机器人,该机器人不仅能实现踝关节的三维转动康复,还能实现踝关节沿小腿方向的牵伸运动.
6.3 移动机器人
基于并联机构的移动机器人已成为机器人研究领域的重要分支之一.Li等[68]设计了一种基于3-UPU并联机构的六足移动机器人,利用上、下平台的交替运动来实现行走,另外还进行了双六足移动机器人的协同搬运设计.选择大工作空间和消除内部奇异的冗余并联机构构型,能满足移动机器人跨越障碍、适应崎岖地形的要求.王志瑞等[9]提出的18R四面体移动机器人能够提高移动过程中的稳定性.在步态设计方面,由于该机构为四面体对称,使得该机器人能实现连续运动且有利于轨迹规划.高峰等[69-70]设计了一种六足章鱼机器人,每条腿都采用了三自由度的并联机构,具有极好的载重能力和稳定性.Wang等[71]设计了一种电动并联式轮足机器人(北理哪吒),既可以以足式行走模式跨越较高的障碍物,又可以以轮式运动模式实现快速机动,同时还具有环境适应力强、运动稳定的优势.
除此之外,可以选择刚度和承载能力大的冗余并联机构应用于移动机器人来实现搬运、搜救等工作.张豫徽等[72]设计了一种爬行类仿生机器人,通过使用冗余驱动支链提高了该机器人的承载能力.Gharatappeh等[73]设计了一种平面电缆驱动并联机器人,可以在步态周期内同时控制机械腿的转动和平移自由度,且该机器人能够有效跟踪轨迹.
7 结 论
本文分析了冗余驱动并联机构在刚度和稳定性、运动学以及动力学、控制等方面的性能特征,分析得到以下三个方面的结论:
1)冗余驱动并联机构在刚度方面的研究通常是在传统并联机构上引入支链形成冗余机构,并将冗余机构与传统机构进行对比,分析其刚度性能的提高.对于刚度试验来说,大多数都是仿真试验和通常工况下的试验,对机构在复杂情况下的刚度分析和稳定性分析较少.由于极限条件的不确定性,目前的冗余机构没有在各种工况下进行试验研究,很多实际工程问题没能得到解决.因此,设计合理的工况试验,分析不同环境下的稳定性以及降低试验成本等方面需要进一步研究.
2)在运动学研究方面,由于冗余机构增加了支链,求解运动学正、逆解的计算量也成倍增加.逆解较易获得,且解具有唯一性,因而得到充分的研究和应用.目前的求解方法不易获得全部正解而且计算量很大.因此,还需要在探寻既能减少计算量,又能准确获得全部正解的新方法方面获得理论上的突破.在动力学研究方面,大多停留在动力学模型的建立上,而在优化冗余力和驱动力方面的研究较少.所以,要使得动力平衡,系统性能达到最佳还需要对建立的动力学模型进行优化设计.
3)冗余驱动并联机构因其性能优势,已应用于并联机床、康复机器人和移动机器人等方面.将刚柔耦合理论应用于冗余驱动并联机构必将扩大其工程应用范围,也将使其具有更加广泛的应用前景.
