基于指标函数的舰载机机队回收调度优化研究
2021-11-11苏析超
万 兵, 韩 维, 梁 勇, 苏析超
(海军航空大学, 山东 烟台 264001)
0 引 言
起降作业调度是舰载机作战能力生成的关键环节,从作业周期看,有约1/2时间处于该保障过程[1],包括甲板调运、勤务保障、离场、进近回收等阶段。国内外学者集中在甲板作业调度(deck operations course of action planner, DCAP),麻省理工学院团队基于混合整数规划、学徒学习、人- 机交互协同决策等方法开展任务规划与作业调度研究[2-5],国内学者刘翱[6]、Wang[7]、苏析超[8]等研究多为分段优化调度,如调运规划、机务勤务保障、出动离场优化及相关问题的鲁棒动态调度研究等。而舰载机回收调度,则是安排着舰飞机的降落次序、等待设置、复飞逃逸处理和着舰时间,并设定飞机相应尾流间隔,使得机队着舰等待时间最短、着舰时间窗最小,提高剩余燃油量、增加着舰安全裕度,最终提升机队回收效能算法。此外,舰载机起降时要求航母调转航向至利于提供甲板逆风以保障起降作业安全,此时航母机动防卫能力弱[1],故开展机队回收优化调度研究对舰-机适航性及航母生存能力意义重大。
回收排序若由人工调度完成,则存在调度规模有限、复飞处置不灵活等问题,由于仅一条着舰跑道,难以实现多人协同调度,极大限制了回收机队规模。此外,与民航飞机进出港排序调度差别较大[9-12],一是进出港飞机计划性强、航线固定,而舰载机空中任务随机性大;二是大型陆基机场空间大、甚至多着陆跑道,而航母为动平台、单着陆跑道且空间有限,与甲板作业空间耦合多;三是民航飞机着陆成功率极大基本不存在复飞情况,而舰载机经常发生复飞逃逸情况需重新着舰;四是舰载机高强度任务更容易出现空中故障,给回收排序带来新情况,需调整调度策略;五是尽管返航具有随机性,但舰载机作业的集中出动与回收特点明显,甲板空间约束与作业安全特点要求其采用尽可能小的时间窗完成回收[13]。故舰载机回收排序动态性更强、突发情况更多,任务效率和安全性比经济性指标要求更高。因此,舰载机回收调度自动规划算法研究现实意义较大。
舰载机回收调度研究,排序方法有先到先服务、时间提前量法(time advanced, TA)与约束位置交换法(constrained position shift, CPS),刘洪等[13]对舰载机着舰排序提出了基于优先级的插入排序与速度调整算法,但未进行复飞处置策略、优先级最优评估研究。Wu、Cui等[14-15]给出了舰载机回收排序模型及任务规模模型,主要以启发式规则构建为主,但主要基于静态调度,对复飞情况处置策略适应性不强。而对于民航飞机进场排序则开展了大量研究,模型方面有动态排序、基于滚动时域的动态调度、多跑道协同调度[16-17];算法方面有遗传算法、模拟退火等元启发搜索算法[10-12,17]和动态规划、分支定界等精确解法[18-19]。但是由于舰载机回收调度的动态特性突出,许多现有文献成果难以直接转化运用。
而针对动态调度问题,Su等[20]给出了鲁棒调度解决思路,刘继新等[21]开展动态协同排序方法,Bennell等[22]基于机场吞吐量、飞机提前或延迟、燃油经济效益等多目标给出了静态计划下的动态规划算法和在线动态数据下的邻域搜索算法。Furini等[23]采用改进滚动时域方法开展动态调度研究。文献[24-27]则基于排队论给出了在预约情况或有预先计划下的在线动态排序与调度研究。而航机场的动态性影响因素主要是气象变化或空域管理带来的延迟影响,这与舰载机回收动态因素也不同。
舰载机回收时动态特性随机性大,除气象因素外,复飞逃逸、机械故障、甲板清空复位、舰-机同时机动等因素带来的扰动影响更多,尽管回收有不同飞行程序,传统静态调度方法得到排序方案适应能力差,而民航方面的动态调度相关算法时效性逊于舰载机要求。那么,考虑采用指标函数基于机队空中态势来实时评估飞机优先序,并按回收编排算法实时给出飞机着舰排序方案。
本文借鉴民航动态排序思想及相关启发式搜索算法,采用Monte Carlo(MC)模拟机队进场、复飞、故障率、速度航线调整带来的时间扰动等随机因素,引入指标函数完成飞机优先序评估排序,实现对舰载机机队回收的实时优化调度。对于指标函数系数的求解,则立足差分进化算法对随机规划模型进行优化搜索[27-29]。指标函数评估将实时评估回收机队态势,从而得到基于该优先序的在线排序。本文核心是离线方式得到最优评估函数系数,并采用MC进行模拟回收实验进行调度优化检验。
1 问题描述
与民航飞机相比,舰载机回收有严苛程序、环境恶劣、动甲板跑道狭小、着舰时逃逸或复飞机率大,受气象海况影响大,同时存在战机受损、飞行员受伤等情况,因此舰载机着舰回收难度远大于陆基飞机。此外,回收效率与规模还将直接影响空中机队执行任务能力。回收效能与飞机性能、飞行员水平、飞行程序、甲板作业能力及任务环境等有关,其排序调度由航空管制指挥系统实施,其能力直接受空管自动化、智能化水平影响。舰载机回收问题研究是优化任务规划、提高着舰成功率、保障空中安全的基础关键工作。
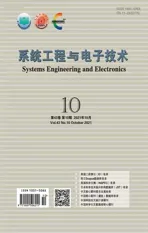
舰载机进场飞行程序分为目视进场和仪表进场,两种方式均由程序化进行,其飞行航线及纵向剖面不同(图1为典型目视进场着舰程序),但飞行程序的逻辑流程与进近排序组织形式一致,抽象出的回收排序与调度逻辑如图2所示。
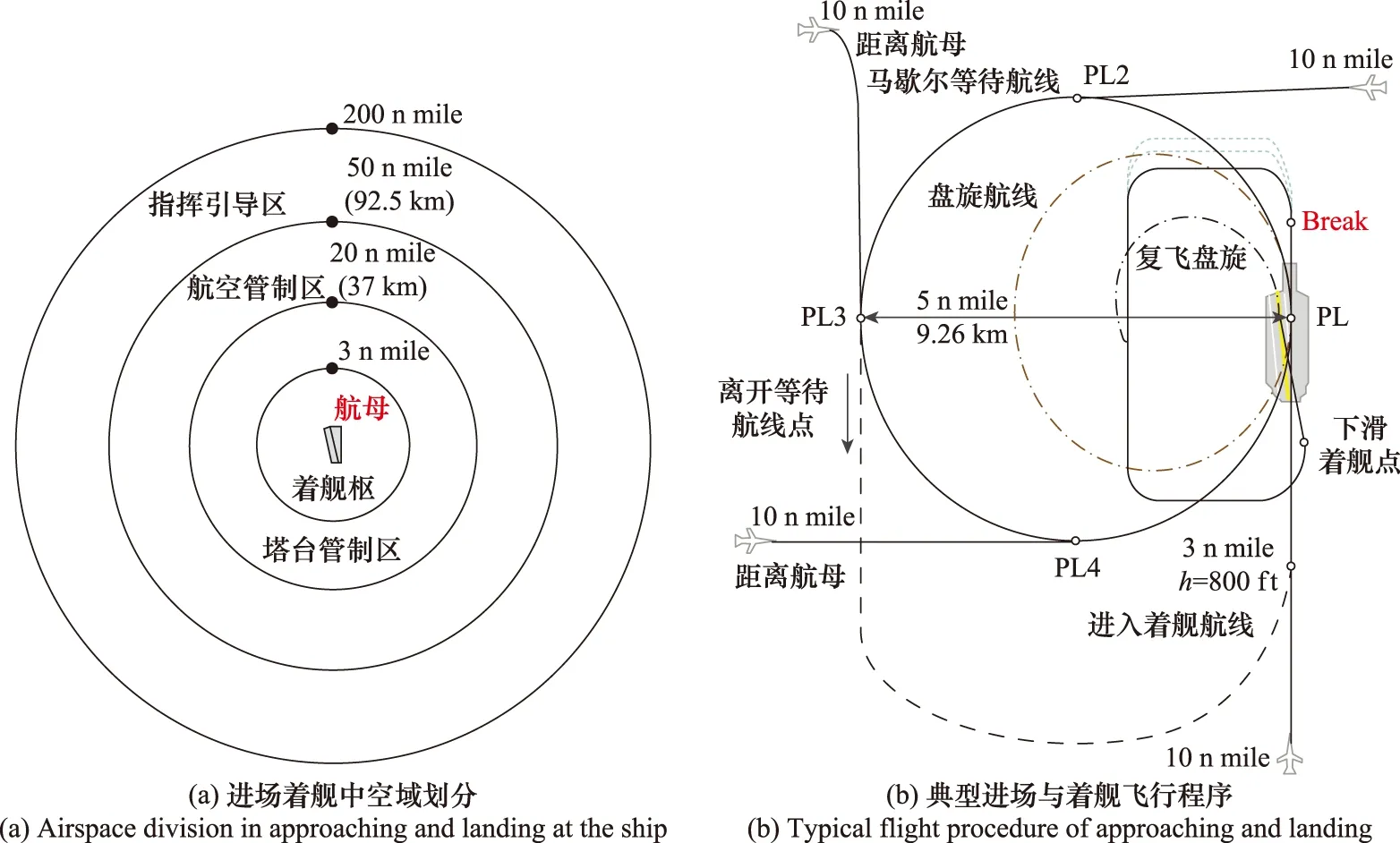
图1 典型目视进场程序Fig.1 Typical visual approach process

图2 舰载机回收排序与调度逻辑示意图Fig.2 Logic diagram of aircraft recovery sorting and scheduling
舰载机回收一般按飞行计划、飞行程序返航进场,在空中任务完成后随机加入返航队列的,在距航母后方约10 nmile时由程序点进入马歇尔等待航线[30]。期间塔台管制员将对回收机队进行排序、马歇尔分层分配、尾流间隔调(通过速度调节或航线微调),完成排序等待后,根据着舰跑道清空情况,依序安排马歇尔等待区飞机从等待航线出发点离开并进入初始进近点,降高并进入着舰航线依次着舰。期间如飞机发生机械故障或燃油不足时则调高优先序并提前着舰;如发生逃逸或复飞,进入复飞队列并加入马歇尔等待航线等待下次着舰。所以发生复飞的飞机实际等同于后期加入等待区的飞机,故调度排序应基于整个等待区堆栈内飞机的优先序进行。而调度员所关心的调度效能问题则是本文的研究重点,因此舰载机机队回收调度优化问题可抽象为满足飞机安全尾流间隔、剩余燃油及跑道清空复位等约束情况下,确保着舰作业时长最短、机队等待时间少而剩余燃油最多的随机规划问题。
调度中,等待区飞机堆栈管理是回收排序问题核心,包括优先序评估出栈、预计着舰时间(expectation time of approach, ETA)评估进栈与分层分配、栈内飞机盘旋圈数更新和尾流间隔调节(速度调整等)。在回收调度设计中,飞机ETA则为最关键的因素,其由飞行程序、等待区盘旋圈数、飞机与航母实时相对位置和速度测算出来。本文主要基于初始ETA,经由盘旋圈数及速度尾流调整进行更新测算。若飞机最终成功着舰,那么其ETA则调整为调度着舰时间(scheduling time of approach, STA);若飞机发生逃逸复飞,那么其ETA还应该继续更新,重新加入等待堆栈。
2 回收调度数学模型
舰载机进机回收是有限缓存区的单机调度问题[31],但与传统单机调度差别甚大,体现在加工工件(飞机)具有抵达随机性、飞行持续性且仅能通过盘旋、调整速度方式进行等待,最为重要的是还可能出现一次加工不成功的问题,即复飞重着舰处理。为更好地建立机队回收调模型,针对着舰回收过程作如下假设[13-14]:① 所研究的是舰载机常归作业下,波次集中回收问题。② 研究舰载机机型属中、轻型飞机,相互间尾流间隔基本相同。③ 假定进场及等待段飞机以经济航速飞行(最优耗油率),且经济航速基本相同;着舰段按飞行程序“五边着舰”要求飞行,其飞行时间基本相同且由基本着舰所需时间和随机调整时间构成。④ 飞机在马歇尔等待区各层盘旋所需时间基本相同,其值由基本盘旋时间和随机调整时间构成。因为舰-机是相互运动的,等待区也在运动,加之各机速度及转弯操纵的不同,处理时间上会有所摄动。⑤ 尽管可以有多种着舰回收模式,但构成逻辑相同(见图2),复飞盘旋等待区是一个逻辑的存在,可以是马歇尔等待区,也可以自行设置一个盘旋区。若出现多机先后发生复飞情况,那么假设其复飞等待区也是分层设置的。⑥ 除着舰末段外,飞行速度基本为经济航速,约为航母速度一个数量级以上,故在简短的机队回收过程中将航母视为相对静止。⑦ 飞机的首次着舰、复飞着舰,其成功概率均相同。⑧ 上述随机调整时间均符合各自规律的正态分布。基于上述假定,现建立舰载机回收调度数学模型。
2.1 参数符号定义
i:飞机编号,i∈N={1,2,…,n};
j:马歇尔等待区分层数,j∈M={1,2,…,m};
si:飞机i的STA;
ei:飞机i的ETA;

ek(j):飞机k分配在第j层时预计着舰时间;

oi:飞机i的剩余燃油量(amount of residue oil: RO);
Ti:飞机i的燃油消耗率;
Ci:飞机i的满载油量;



H1(i)、H2(i):飞机i是否发生第1次、第2次复飞逃逸情况;
ti, j:飞机i在第j层内盘旋一圈所需时间;
ti,j′、ti,j″:飞机i在复飞相应等待区第j′、j″层内盘旋一圈所需时间;
Δτi, j:飞机i在第j层内盘旋时因尾流间隔或塔台要求进行微调的随机量;
Δτi,j′、Δτi,j″:飞机i在复飞相应等待区第j′、j″层内盘旋时因尾流间隔或塔台要求进行微调的随机量;
Δδ(i):飞机i在正常着舰中因安全尾流或操纵原因所需时间的调整量,为随机量但散布不大;
Ta(i):飞机i在复飞中“五边着舰”所需时间;
Tδ(i):飞机i在复飞着舰航线中因尾流间隔或突发情况的调整时间,为随机量但散布不大;
PR(i):飞机i在等待区中特殊优先级状态。
2.2 基于等待圈数的随机规划模型
2.2.1 目标函数
回收排序与调度最终实现着舰时间窗尽可能小,飞机总等待时长尽可能短,机队剩余燃油尽可能多等目标,分别由Z1、Z2、Z3表示。其中,飞机等待时长由最终调度着舰时间STA与初始预计着舰时间ETA0之差来表示。最终是实现飞机集中回收,减少对着舰跑道的长时间占用,提高甲板作业保障效率,利于提升舰载机出动效能;同时,尽可能降低飞机盘旋等待圈数,整体优化着舰飞机序列;剩余燃油量越多代表着舰安全性、经济性越高,也体现训练的科学性。故目标函数记为
(1)
2.2.2 约束条件
(1) 剩余燃油约束
从飞行安全裕度看,飞机着舰时剩余燃油应至少超过满载油量的const%,那么约束记为
oi≥Ci·const%,∀i∈N
(2)
式中:const值可根据飞机性能和任务情况取不同值,如取20%。
而从飞机进近开始,经马歇尔等待区排序,后到成功着舰的过程中,飞机的剩余燃油量与预计着舰时间的关系,可近似记为
(3)

(2) 安全尾流间隔约束
根据文献[32]关于飞机安全尾流间隔有关要求,对于本文所研究的舰载机假定为中型机,那么其间隔为6 km,又由于飞机进场速度约为0.45 Ma(经济耗油率飞行)、着舰速度平均[30]约为0.32 Ma,经计算有马歇尔等待区安全尾流间隔ε1约40 s,着舰航线区安全尾流间隔ε2约55 s,记为
(4)
式中:∀k,l∈N|k,l为前后续飞机,∀j∈M。
(3) ETA约束
定义 1舰载机单次着舰成功概率P0,其对立事件为发生复飞逃逸,即复飞概率Pl0,记为Pl0=1-P0。
引理 1如果舰载机在允许复飞着舰情况下,累计着舰成功概率大于0.99则认为成功着舰,那么对于一次性着舰成功概率P0>0.9,舰载机最多经历两次复飞便能成功着舰。
证明对于一次性着舰成功概率P0>0.9时,假如无复飞情况,舰载机累计成功着舰概率大于0.9,不满足条件要求;假如有一次复飞着舰机会,累计成功着舰事件包括:第一次着舰成功、第一次失败和复飞着舰成功,其对立事件为第一次着舰和复飞均不成功,概率P记为
P=P0+(1-P0)P0=1-(1-P0)2≥0.99,P0≥0.9
(5)
累计成功着舰概率大于等于0.99,尚不能完全满足要求;假如有两次复飞着舰机会,累计成功着舰事件包括:第一次着舰成功、第一次失败第一次复飞着舰成功、第一次和复飞第一次失败但复飞第二次成功,其对立事件为第一次着舰和两次复飞着舰均不成功,概率P记为
P=P0+(1-P0)P0+(1-P0)2P0=
1-(1-P0)3≥0.999,P0≥0.9
(6)
累计成功着舰概率大于等于0.999,完全满足条件要求。因此,假若有n次复飞机会,舰载机累计成功着舰概率
P=1-(1-P0)n+1
(7)
对于P0>0.9,欲使P>0.99,可得n≤2。
故最多两次复飞能实现舰载机成功着舰。
证毕

(8)
发生第一次复飞:
(9)
发生第二次复飞:
(10)
式中:该期望着舰时间关系式由多个随机事件约束来表达。
(4) STA等式约束
经过排序与复飞调度后的着舰时间STA,即为经过复飞后成功着舰的最终期望着舰时间,记为
si=ei,∀i∈N
(11)
(5) 飞行速度约束
飞行速度应满足飞线包线要求,进近阶段速度假设在经济速度附近,那么飞机速度变化及时间调整率满足
(12)
式中:αi,βi分别表示速度变化对时间调整的延后率、提前率。即通过速度调整,ETA时间范围是[αiei,βiei]。
(6) 着舰跑道清空约束
前续着舰飞机是否离开跑道,拦阻索是否复位,即跑道是否已清空,否则飞机安排复飞处理。因跑道清空时间小于着舰段尾流间隔时间,故该约束包含于尾流间隔约束。
2.2.3 决策变量

(13)
(2)H1(i)、H2(i)为0-1布尔决策变量——复飞,是飞机以复飞逃逸随机事件是否发生决定,分别表示第1次或第2次复飞,见式(9)~式(10)。
(3) Δτi, j、Δτi,j′、Δτi,j″、Δδ(i)、Tδ(i)为随机扰动量——随机时间,前3个是飞机在等待盘旋或复飞盘旋时用时的随机调整量,随机变量的分布情况需根据平常飞行训练数据得到,但也可从理论上进行大致估算,主要依据飞机速度微调、盘旋半径调整控制模拟得出该随机分布;后两个分别是首次着舰和复飞“五边着舰”中用时调整随机量,其分布情况由飞行训练统计获取,也可理论模拟计算。
2.3 多目标优化处理策略
针对所建立的多目标优化模型,最佳策略是加权为单目标化处理。由于调度优化方案在不同情形下侧重点会不同,即对子目标的偏好有区别。如,在密集起降作业过程中,甲板作业要求高,任何作业应尽可能降低对甲板资源占用,那么此时机队着舰时间窗越小越好,其他目标要求相对要低;而在甲板作业并不繁忙情况下,着舰回收跨度可以较长,那么此时飞机总等待时长应尽可能短就显得重要一些;同样,在勤务保障较为缺乏情况下,可能剩余燃油量尽可能越多越好。
综上,看似多目标优化问题,具体到实际状况时,基本上以单目标优化为主,而如何选取则依据目标权值进行设置。
在多目标加权处理前,将各子目标值进行规范化处理,确保其值均处于同一量级来评估,最终加权得其综合目标值。多目标式(1)中的3个子目标的权值分别为β1、β2、β3,经加权处理后,多目标化为单目标问题,记为
minimizeZ=β1Z1+β2Z2-β3Z3
(14)

式中:权值设置由调度员根据任务需要或偏好来进行设置。
2.4 决策变量转化
上述随机规划模型反应了舰载机进近回收调度的表现形式,可完整呈现模型,主要从着舰回收整个执行过程来建立,但着舰回收问题随机性大、安全要求高、机械故障突发性强,因此优化问题本身难以有最优化解。此外,回收决策本身是一个动态与随机调度相结合的决策问题,决策变量涉及随机变量及其诱导变量(如复飞情况),而从静态调度优化角度难以求解,或者仅能获得某种参考意义解而在实际执行时诱变甚多较难提供可取辅助决策建议,故应寻求动态等效求解方法。
如果从回收调度结果看,第2.2节中的数学模型构建了该问题,而从塔台调度员角度看,进近回收是一个串行多步决策问题,即基于态势的评估决策,每次从回收等待机队中选择优先序最高的飞机进行着舰,若发生复飞则重新加入等待机队重新进行着舰调度,直到等待机队全部着舰完毕。调度员采用的便是基于态势的动态调度方法,主要凭借经验和人工启发式规则进行评估,但调度规模有限。因此,应将该随机调度问题转化为评估排序问题,基于态势打分来确定飞机的优先序进而逐个安排着舰-复飞-着舰。
而在评估排序中,模型的决策变量则是附带产生,根据飞机排序情况和模型约束要求,进行相应的盘旋等待、安全尾流间隔控制或复飞处置策略。因此,通过设置合理的评估排序算法,可将基于着舰终止状态的静态调度问题转化为动态决策问题,从而获得模型优化解,优化目标值、盘旋圈数等。
3 排序指标函数与求解算法
针对第2.3节提出的转换决策变量法,将静态问题化为动态排序决策,若单纯进行随机排序优化计算,那么该复杂度则为阶乘级运算量(如以18架飞机回收为例,计算复杂度为18!)。我们可以考虑选用模拟退火、基因遗传算法等全局搜索算法直接来求解,然而上述算法除了可能陷入局部收敛、种群早熟、算法效率不够高等不足外,针对调度过程还存在有随机发生的飞机逃逸复飞情况,也就是可能出现调度过程中随机重调度设计问题,而且要求重调度具备在线规划能力,显然用最优化目标函数的处理策略难以实现。因此,针对该动态调度问题,考虑引入评估排序算法的多步规划、实时决策来完成。这里,对回收机队的评估,本文选用基于线性组合的特征指标函数来达成。
3.1 指标函数设计
人工调度启发式规则,通常综合考虑先到先服务(ETA越小优先级越高)、特殊优先级飞机优先(如飞机故障、剩余油量告警等)、复飞飞机优先着舰等原则。借鉴上述规则,那么影响回收飞机优先序的因素应包括:当前ETA、所处在等待区的层级数(如图2所示)、剩余燃油量、是否处于复飞逃逸状态、特殊优先级(燃油/机电系统故障)等。在这5个特征因素当中,ETA、RO为连续变量,层级数为离散量,特殊优先级、复飞状态为布尔量。那么,等待堆栈中飞机的实时态势评估的指标函数f(i)可由下式表示,对于∀i∈N,有:
(15)
式中:ak(i)为经过规范化处理的属性值;λk|k=1,2,…,5分别是对应上述属性的系数;C为常数;PR(i)为特殊优先级状态。特征属性规范性处理目的,就是在某组选定系数下,使得式(15)的指标值与各特征属性成统一的正向关系,并且保持与人工启发式选择规则相一致。比如,第一项表示ETA越小其份量将越大,第二项则是优先序随等待区层级变大而变小,第三项则是剩余油量比率越低其影响越大,复飞和特殊优先级状态则相当于开关控制量,发生该状态时优先序增大。
指标函数的设计,在设置合理的系数基础上,目的是给当前堆栈飞机进行评分,评出最高优先序飞机,安排其出栈并进入着舰航线,进而完成动态调度的单步决策动作,不断评估直到堆栈飞机全部安排完毕。当然,不同指标函数系数的选取将对回收调度结果产生不同影响,即改变第2.2节模型目标函数值。因此,对数学模型的优化求解,最终寻求最优指标函数系数值。
3.2 回收排序编排算法
在给定指标函数系数,规划模型的多目标处理后,针对机队返航着舰调度问题,可采用基于指标函数的态势评估决策和MC模拟复飞来开展动态条件下回收排序方案的编排。
3.2.1 等待区分层分配策略
对返航进场机队,在进入着舰航线前,需在马歇尔等待区进行盘旋等待(如图2所示),并且分组分配在不同的等待层。通常每个等待层至多分配4架飞机,可采取空中任务编队分组进行等待层分配。本文提出机队{ETA}集合时间聚类分层的分配策略,并按照先到先服务原则由低到高层进行等待层分配。因为时间聚类方法一定程度上将编队分组考虑进来了。具体策略是:机队{ETA0}按照由小到大顺序,每n(n≤4)个近邻飞机分组分配至同一等待层,越往上层ETA值越大。期间,各层进行安全尾流间隔检查,若满足则初始{ETA0}保持不变;否则,通过自动进场(速度、航路规划等)进行调节(不属于本文研究内容),更新始初进场{ETA0}。完成分层分配后,飞机便在相应等待层盘旋等待进入着舰航线,本文研究主要从安全角度考虑而不进行跨层降高处理(当等待区下层飞机进入初始进近之后,上层机队并不按照进场时间顺序下降到下层等待区)。而处于等待区不同层的飞机在回收着舰中可忽略高度差对着舰时间的影响,因为离开等待区到“五边着舰”需进行大盘旋飞行转换,在等待层数较少(小于5)时,其水平航程远大于高度变化,故忽略降高飞行时高度差所带来的飞行时间影响(且该处理对最终目标值影响不大)。
3.2.2 复飞处理策略
由于机队的进近着舰为连续作业、动态推进的过程,进入着舰航线的飞机是否发生逃逸复飞、哪一架会发生,事先无法得知,但是针对该随机事件,本文引入MC模拟抽样来模拟可能发生复飞、甚至是二次复飞的飞机,并根据第2节中模型假设的着舰成功率来抽样发生复飞的飞机架次。该模拟处理能够逼近真实情况,检验算法的效果。
3.2.3 调度编排算法

输出回收排序方案。机队着舰序列、着舰时间;目标函数值;机队盘旋圈数、复飞状态及等待圈数,飞机最终剩余油量。

步骤 1机队分层分配进栈。按照第3.2.1节的分配策略,完成机队分层分配,并将该堆栈记为{M(j)}。
步骤 2堆栈进栈管理。判断有无加入等待航线的复飞飞机,对于常规回收模式,如有进栈情况则按照由下往上逐层检查有无空位,并添加复飞飞机入栈等待,否则无操作;对于特殊回收模式,如有进栈情况则在复飞盘旋区(不同于机队等待区)同样按照由下往上逐层检查有无空位,添加入栈,否则无操作。
步骤 3编排结束判定。判定堆栈、航线队列是否有飞机,若无则结束任务,完成机队回收,输出相关信息;否则,堆栈内有飞机进入步骤4,航线队列有飞机进入步骤8。
步骤 4栈内飞机优先序评定。按照第3.1节指标函数对栈内飞机的优先序进行打分排序。
步骤 5着舰航线队列判定。航线队列是否饱和,若是返回步骤4,否则进入步骤6安排飞机出栈。
步骤 6栈内飞机出栈与约束检查。按照优先序顺位出栈原则,首先选择最高优先序出栈,进行航线队列尾流间隔检查,若不满足则安排下一优先序飞机出栈,并进行间隔约束检查,直到满足;否则进入步骤7。
步骤 7堆栈出栈管理。选择优先序最高飞机出栈,记录该机ETA。同时更新其他不出栈飞机ETA,处理策略:比较其与出栈飞机的ETA大小(具体如下式判定),若满足则盘旋圈数不变,其ETA也不变;否则盘旋圈数依次加1并由式(8)更新其ETA,反复检查下式要求,一旦满足则停止加圈,并记录其他相关决策信息(盘旋圈数、随机量信息)。
ek-eleft≥tk, j+Δτi, j,∀k∈M
(16)
式中:M={M(j)}为堆栈内飞机;left为出栈飞机。
步骤 8着舰航线队列控制。该航线队列如图3所示,完全具备流水线队列特点,但同时还要满足间隔约束。一是完成出栈飞机的入队添加,二是删除队列中着舰/复飞飞机。
图3 着舰航线队列图Fig.3 Diagram of landing queue
步骤 9飞机复飞模拟判定。利于MC模拟,抽样出航线队列中最前位飞机是否发生复飞逃逸情况,若着舰失败则飞机进行复飞处理,按照式(8)更新飞机ETA(此时复飞等待圈数暂为0),返回步骤2加入等待区堆栈,并记录复飞状态;否则记录出栈飞机ETA等信息(盘旋圈数、复飞状态、随机量等),将ETA记为STA,并返回步骤3继续任务编排。
步骤 10结束后相关计算。回收编排完成后,根据回收机队排序所生成的输出信息,计算式(14)目标函数值Z。
综上,回收排序编排算法结构如图4所示。

图4 回收排序与调度算法流程Fig.4 Flowchart of recovery sorting and scheduling algorithm
3.3 指标函数系数优化算法
机队回收排序为动态随机过程,难以由静态调度寻求最优解,于是提出基于指标函数的飞机态势评估的优先序决策方法完成回收排序,调度方案的生成关键在于指标函数系数。那么,在多目标权值和飞机复飞等随机量分布已知情况下,机队回收调度优化问题的核心是求解一组指标函数的最佳系数。
该组系数均为正实数,搜索空间为R5正数部分。对于连续变量的优化搜索算法较多,如梯度下降、牛顿搜索、二分法优化等[32],但由于数学模型为随机规划模型,一是目标函数的连续可微性难以保证,二是容易陷入局部最优。
为统筹考虑快速收敛和空间全局搜索性能,我们考虑用元启发式搜索算法—差分进化(differential evolution, DE)算法[28-29],该算法源于遗传算法但收敛性能更好。为此,本文采用智能搜索算法来实现,提出基于MC模拟与DC结合算法(简记为MC-DE算法)求解最佳指标函数系数。MC模拟的是模型中的随机量,DE算法主要对指标函数系数进行群智能优化搜索。系数优化算法的结构流程如图5所示,其计算步骤如下。

图5 基于MC-DE的指标函数系数优化算法架构Fig.5 Flowchart for optimization of index function coefficient based on MC-DE algorithm
输入种群Po;系数维度D为5;总代数T
输出最优系数向量Δ

步骤 3最优化判定(结束)。若Z(Δ)≥M∨t≤T,则进入差分搜索参数步骤4;否则算法结束。其中M为预设的理论目标值,主要参考人工调度着舰得到结果。

图5中算法架构中目标函数值的计算主要由第3.2节中调度编排算法完成,MC模拟其中的随机量与复飞发生情况。指标函数系数的不同取值将直接实时影响回收飞机的优先序,从而在第3.2节编排算法中生成不同排序方案并得到机队回收目标值,因此寻找最优指标系数将在排序调度中生成最终最佳调度方案。通过调度数学模型和MC-DE算法架构进行最优调度评估,最后得到所需要的指标函数系数,并以此作为回收飞机优先序的打分方法开展回收动态调度工作。
本文所提出的是离线优化策略,即采用MC模拟某机队回收过程数据及随机扰动量,然利用调度编排算法和指标系数优化算法,得到调度问题的最佳指标系数,全程采用离线模拟优化处理。其实现过程为由第2.1节中模型合理假设后,由MC模拟机队进场后预计着舰时间、等待时间、复飞发生概率等随机量,由DE算法给出初始最佳指标系数,结合数学规划方法进行调度编排,并以此调度目标值为适应度然后基于DE算法搜索飞机态势指标函数优化系数。而回到现实机队回收过程,则可利用离线优化得到的指标系数,完成由飞机态势-飞机优先序-实时调度着舰-更新飞机态势-更新优先序的实时评估与决策工作,用于实时评估进场飞机优先序,进而在模型约束下,实时编排回收序列,并实时给出尾流间隔调整策略,得到机队着舰回收调度方案。
4 实例仿真
假定在着舰回收过程中,甲板拦阻索的复位、着舰跑道清空、工作人员接机准备等因素全部工作正常,均能在着舰航线飞机尾流间隔内完成着跑道清空与拦阻索复位,即复飞逃逸与着舰成功为互补事件。
仿真初始条件设定如下:集中回收机队数量14架,回收初始参考时刻t0=0,飞机进场时前后机间隔服从均值为1的指数分布(即,间隔为1 min的指数分布散布),通过指数分布随机数模拟后并进行尺度映射到[18, 36]min,初始数据见表1。飞机进场时剩余燃油量则服从(40%, 10%/2.58)的正态分布(即,每架飞机剩余油量(总满油量的比率)以99.7%的置信度分布在30%~50%之间),飞机燃油每分钟消耗率2/300%,飞机在等待区盘旋一圈时间为10/3 min,其随机散布值服从(0, 0.1/1.96)正态分布(即,随机值以95%置信度落入[-0.1,0.1]min),着舰成功率取为0.9/0.95,复飞飞机重新调整加入着舰时间为4 min,其随机散布服从(0, 0.1/1.96)正态分布,假定复飞至少盘旋等待一圈,加入等待航线应满足尾流间隔要求并调整预计着舰时间,全部飞机等待时间、复飞时间都根据式(3)消耗燃油。着舰回收序列的编排依据随机规划模型并由回收编排算法完成。

表1 初始输入信息Table 1 Initial input information
取多目标函数的权值[β1,β2,β3]=[0.5, 0.2, 0.3],态势指标函数的系数λi∈[0, 10],仿真运行平台为Matlab2014a,电脑为IntelI CoreI i7-4790 CPU @3.6 GHz,内存16 GB。
4.1 初始输入下回收调度优化仿真与分析
基于仿真条件和初始输入信息,着舰成功率为0.9,研究每个马歇尔等待层设置4架或3架飞机,利用MC-DE算法进行回收编排与指标函数搜索和调度优化。DE算法种群规模100个,代数为5 000代。图6为等待层设置4架飞机时对总目标、子目标值,各代最优λ指标系数的散布及最优调度方案的仿真结果。其算法仿真时间3 719.61 s,目标最优值14.98,着舰时间窗24.33 min,最优指标系数[6.47, 2.99, 2.34, 6.94, 5.38],各代平均优化系数[6.61, 4.59, 4.89, 4.62, 5.04]。图7则为等待层设置为3架飞机的仿真情况。目标最优值15.13,着舰时间窗24.92 min,最优指标系数[7.12, 4.52, 3.87, 4.23, 5.62],各代平均系数值[6.66, 4.61, 4.95, 4.74, 4.77]。


图6 等待层设置为4架飞机的仿真结果Fig.6 Simulation result of waiting level set to 4 aircraft
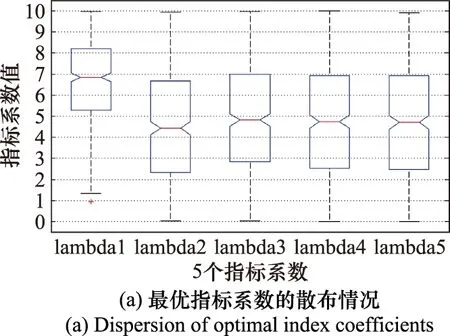
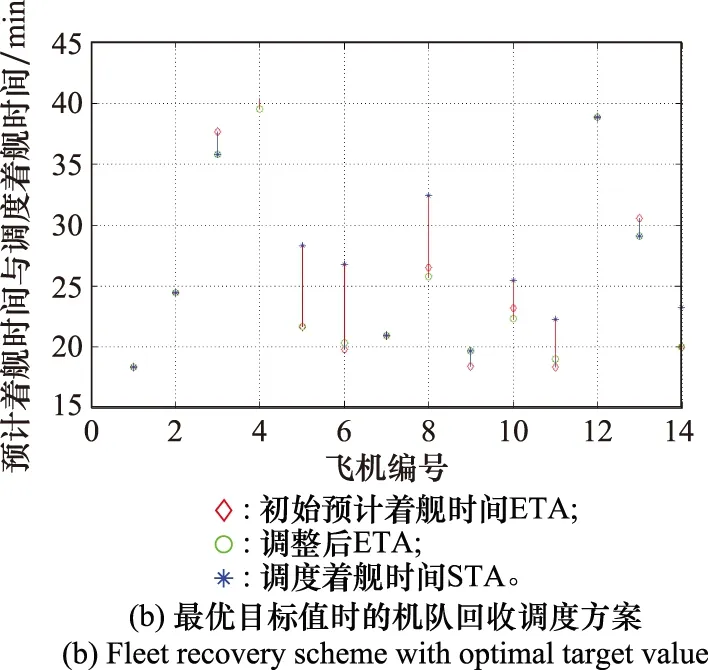
图7 等待层设置为3架飞机的仿真结果Fig.7 Simulation result of waiting level set to 3 aircraft
单独分析等待层设置3架或4架飞机情况。随机规划迭代结果并非直接收敛到固定值,而是收敛在一定范围内且呈统计规律,两者结果基本相似,尤其是Z1子目标时间窗目标值围绕N(24.42, 0.05)呈现显著正态特性,Z2、Z3子目标也具有该特点;两者最优系数迭代均值的散布规律也相同;二者最优目标值回收调度方案有差异,但是目标值相当,飞机总等待时间均约为29.13 min。
通过仿真对比二者。对于机队规模为14架的回收调度,在目标最优值、指标系数以及调度结果看二者调度结果差别不大,每个等待层设置4架飞机最终调度结果的总体效果略好于设置3架飞机情况。然而当机队规模不大时,选择等待层设置为4架飞机明显好于3架飞机。因为进入等待圈层时,需要进行尾流间隔调整。这会导致等待延迟,带来燃油量增大,此外,尾流间隔的调整同时也涉及速度调整从而偏离经济航速导致燃油量的增多。
4.2 基于初始值的回收调度模拟实验
在同第4.1节相同的回收初始输入下,选择等待层设置4架飞机,指标系数设定值是基于指标系数优化值散布的均值来进行模拟回收调度实验。
4.2.1 着舰成功率为0.9的回收模拟
(1) 子目标值正态性检验。在最初进行的110次回收模拟调度中有29次为未发生飞机复飞逃逸情况,通过对其着舰时间窗的的残差和正态性分析表明,在0.05置信水平下,时间窗子目标的数据显著地来自正态分布总体。
其残差与正态性检验如图8所示。从无复飞情况下的时间窗子目标结果看,在所设定的指标函数系数下,随机扰动因素对仿真结果影响甚小,目标值残差散布小。即指标函数系数具有较好地适应性和评估稳定性,可较好完成飞机态势信息评估,并实现机队回收优化调度。
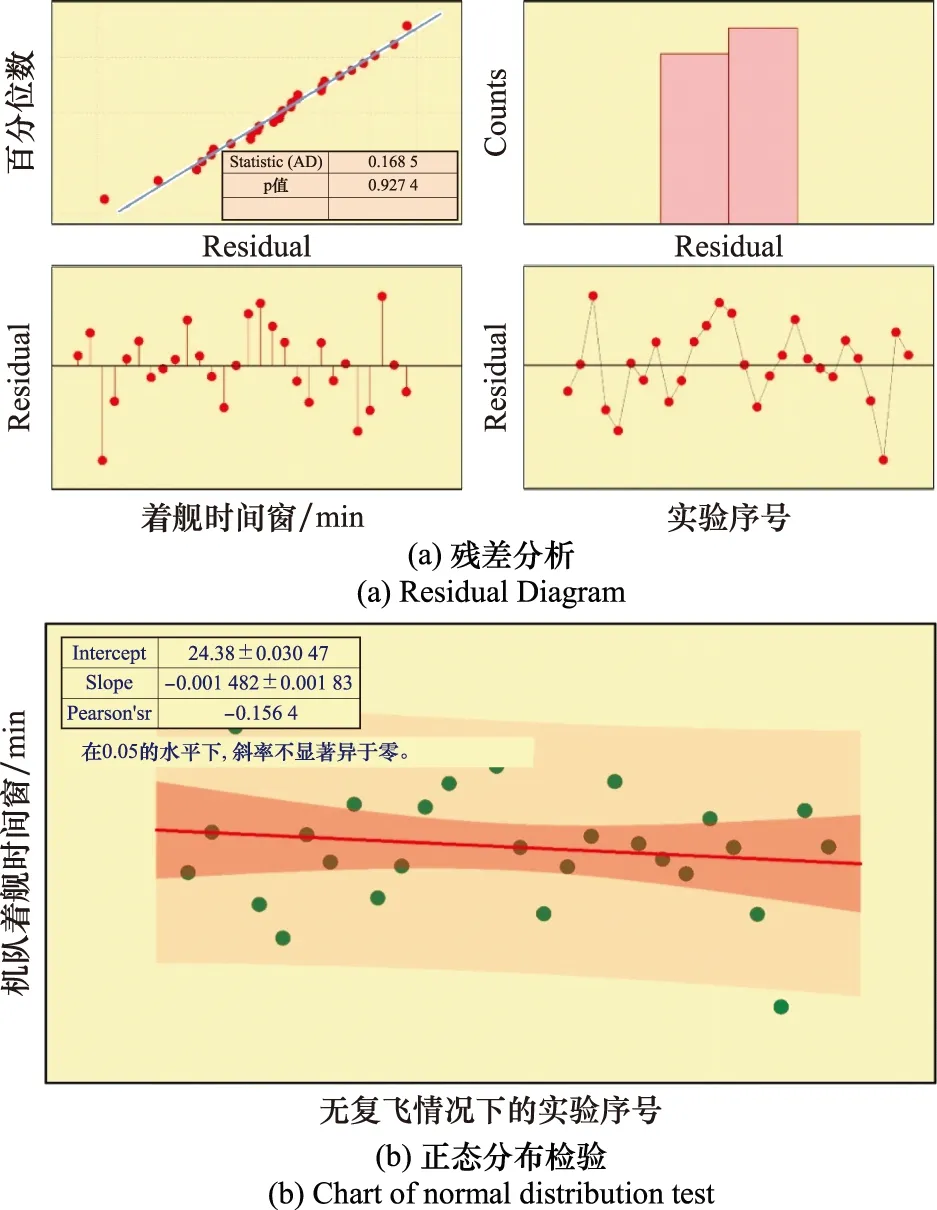
图8 无复飞时着舰时间窗的残差与正态性检验Fig.8 Residuals normality test of the landing time window without a missed approach
(2) 连续模拟仿真分析。基于上述指标函数系数分析,着舰成功率为0.9时对初始机队输入进行300次连续模拟回收实验,发生不同复飞情况的调度及目标值均值情况如表2所示。统计特性表明,机队回收中发生复飞的概率为0.77,发生两次以下复飞概率为0.81,其中发生1次复飞概率最大为0.30,每发生一次复飞相当于回收机队增加一架飞机,平均时间窗目标值、总等待时间随着复飞次数的增加而增大,每增加1次复飞情况时间窗平均增加2.5 min,总目标值在复飞次数不多时按复飞次数平均增加4。然而由于发生5~6次复飞概率较低,其样本统计规律不显著,且其结果与初始机队信息关联较大。

表2 着舰成功率0.9机队回收的模拟调度实验
(3)随机模拟调度实验。随机规划优化具有统计特性,然而对于甲板调度员而言,需要算法快速生成不同调度方案然后基于启发式经验选择综合满意度最高的方案,即MC-DE算法辅助决策功能的检验。指标参数的搜索基于第4.1节获得,其在统计意义下具有一般性。综上,开展无复飞、1~3次复飞情况下的随机模拟调度仿真,生成相应回收调度方案,结果如表3所示。表中发生复飞飞机编号用下划线表示,随着复飞飞机发生次数的增加,盘旋圈数增多,相应着舰时间窗也增大,但并不呈现线性关系。复飞生成是基于MC模拟,具有随机性,贴近真实着舰问题。结果表明,随机单次模拟包含在统计特性中,调度方案的目标值较优、满足相关约束,既符合实际情况,又能提供实时辅助决策建议。
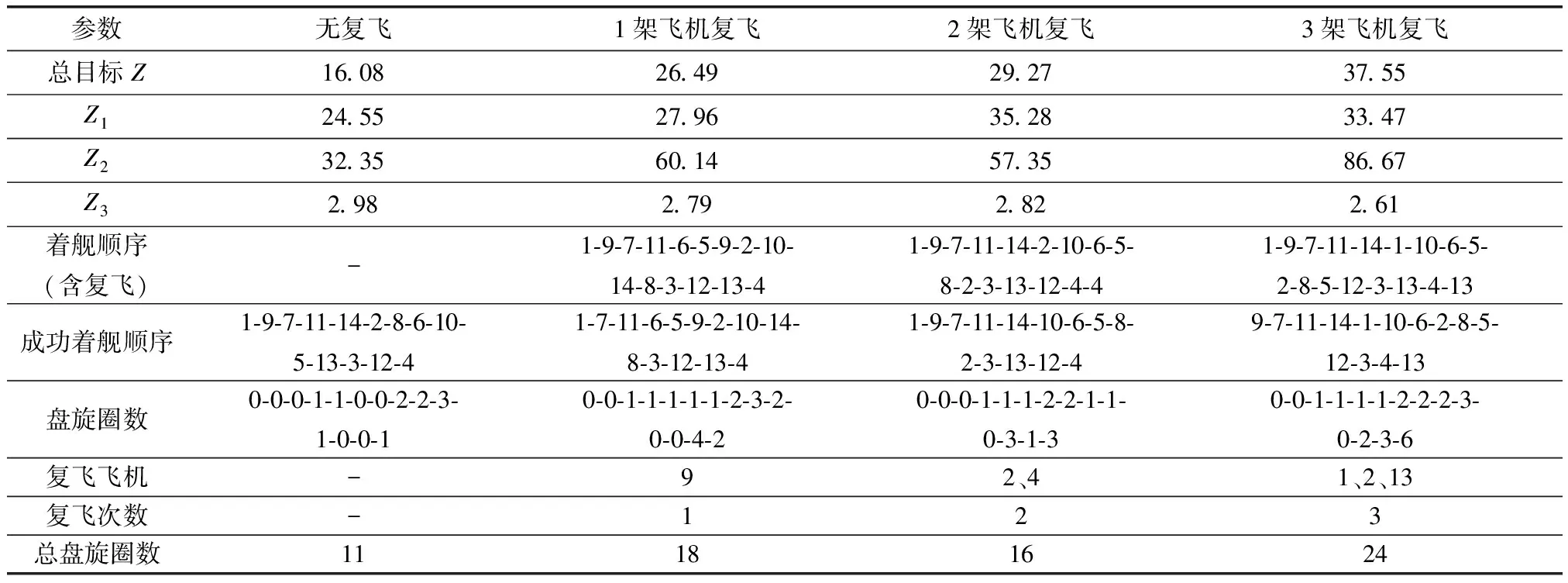
表3 随机模拟方案生成Table 3 Random simulation scheduling scheme generation
4.2.2 着舰成功率为0.95的回收模拟
模拟仿真条件同第4.2.1节,改变着舰成功率为0.95(即着舰水平提高后),同样也进行300次回收着舰的模拟调度实验,结果如表4所示。

表4 着舰成功率0.95机队回收的模拟调度实验Table 4 Simulated scheduling experiment with landing success rate 0.95
实验表明,与表2相比,提高着舰成功率后飞机复飞发生最多4次而非6次,且无复飞情况的概率最大为0.44,至多发生2次复飞的概率为0.95,远高于表2的0.81。模拟实验的其他目标值散布也具有统计学特性,可用来指导评估调度方案,其目标值散布如图9所示。
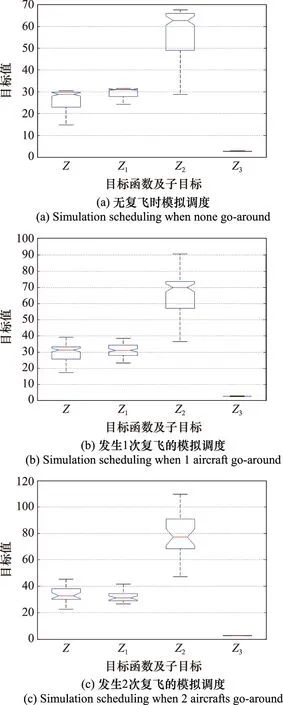

图9 不同复飞情况下目标值的散布Fig.9 Dispersion of target value in different go-around situations
4.3 基于随机初始值的模拟调度分析
4.3.1 不同初始输入下指标系数的散布分析
前面的实验分析是基于相同初始信息进行,若初始输入为满足仿真条件的随机分布值,选用等待层设置4架飞机,着舰成功概率为0.95,其他参数同第4.1节并进行MC-DE算法仿真。经过500次的模拟优化计算,并对每次模拟得到的λ指标系数优化值的均值进行散布分析,其散布情况如图10所示。结果表明,改变初始输入信息,对飞机回收态势评估函数的系数优化值基本相同,散布较小,即得到的评估函数系数进行回收调度具有一般性,调度的优先序评估中可选择优化值均值进行。
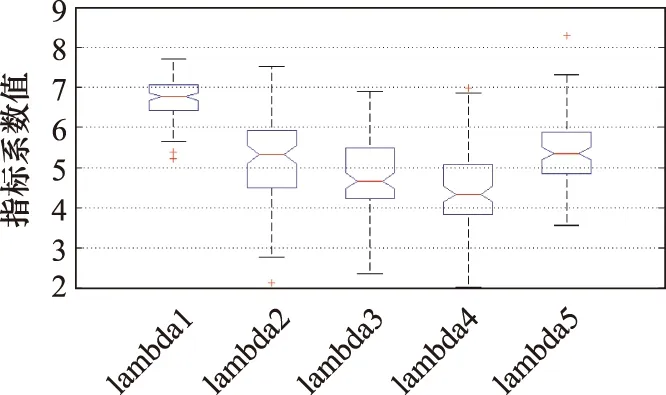
图10 不同初始输入下最优化指标系数值的散布Fig.10 Dispersion of the optimization index coefficients in different initial input
4.3.2 不同初始输入下回收调度实验分析
其他仿真条件同第4.3.1节,种群大小为100,迭代次数为5 000代,进行MC-DE算法实验,目标函数散布情况如图11所示。结果表明,随机输入下,最优目标值散布小、呈现微小偏度的正态特性,其时间窗子目标基本稳定在23 min、总等待时间约为32.5 min,该仿真最优结果是无复飞情况下所得到的。指标系数优化值均值为[6.86, 5.32, 4.69, 4.38, 5.41],已在第4.3.1节分析。综上,不同输入条件下算法最优结果的小散布特性,说明算法的鲁棒性较强,指标系数的适应能力较好、通用性较强。
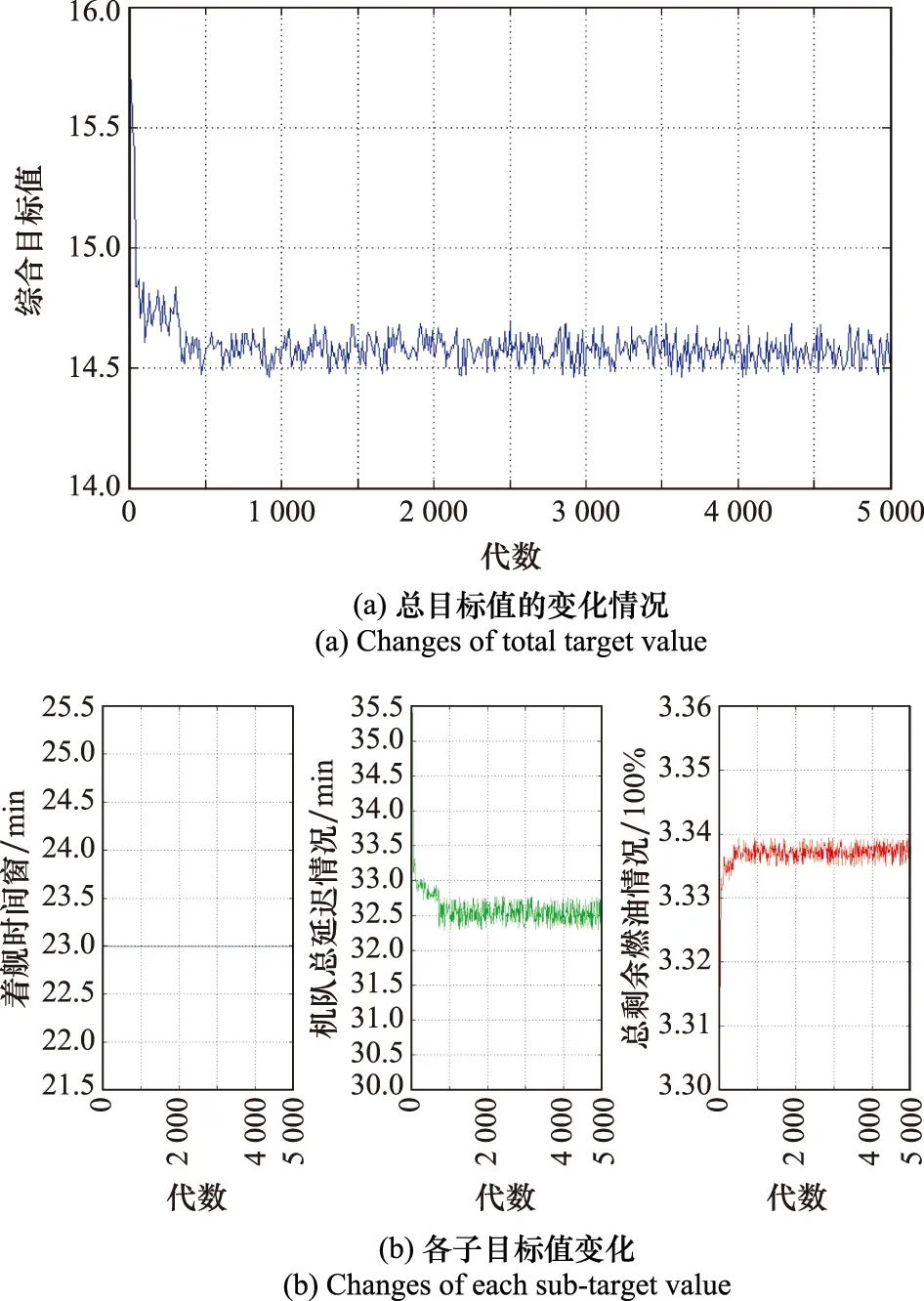
图11 不同初始输入下各目标值散布情况Fig.11 Dispersion of each target value in different initial values
5 结 论
机队回收调度研究基于进场与着舰飞行合理假设,考虑尾流间隔调整、盘旋时间随机摄动性以及复飞、飞机故障等随机因素,研究了机队在等待层设置不同飞机、着舰成功率不同情况下回收调度优化问题,具有较强的鲁棒性、适应性。
(1) 通过对相同初始输入下MC-DE算法仿真分析,表明随机规划模型的目标值具有较强的统计特性,最优目标值收敛在一定范围内。通过对不同初始输入的仿真,表明指标系数优化值散布不大,利用指标系数均值进行回收模拟调度,印证了算法的模拟性、实时性及通用性。
(2) 在回收机队规模较大时,等待层设置4架飞机的目标优化结果略好于设置3架飞机。而机队规模较小时,等待层设置飞机数越小越好。
(3) 不论仿真初值固定或是按仿真条件所服从的指数分布随机生成,实验表明,无复飞情况下机队着舰时间窗相差不多,约为23~24 min,且其值呈显著正态特性。当然,若发生复飞,各种随机情况差别较大,其目标值的研究不具有明显统计特性。
(4) 着舰成功率的不同,不直接影响目标值,但在300次模拟调度实验中,对复飞发生次数概率影响较大,提高该值,可以显著降低飞机复飞发生次数。
(5) 机队回收调度,在小规模调度情况下,人工调度容易控制,但随着回收机队规模增多,自动规划算法将较好地提供调度员辅助决策方案,尤其是发生舰载机复飞时,算法的实时规划将提高机队回收作业优化调度能力。