一种基于DBSCAN聚类的雷达点迹处理方法
2021-11-09翟玉健余承智
翟玉健,余承智,高 星
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
随着雷达探测技术的发展,连续波雷达的应用越来越广泛。连续波雷达时宽带宽积大,距离分辨率高,收发天线分置,可以同时进行发射和接收,无距离盲区[1],在交通监控领域得到了广泛的应用。目前国内外研究和应用的重点主要是对地面移动车辆的监控,本文将连续波雷达应用到对水面目标的监控,对水面近距离、多个静止和运动的目标进行探测和跟踪。与地面移动车辆相比,水面上的目标外形各异,大小差异也更大,导致在雷达机械扫描过程中各个目标的驻留时间差别较大,特别是对于距离较近的大型水面目标,在距离维度和方位维度占据较大的空间,且有多个分散的强反射点。在雷达扫描的过程中,目标在方位维上的回波幅度不再是一个抛物线。传统的点迹处理方法是将一个方位-距离的二维问题,分解成了方位维和距离维的2个一维问题处理。这种处理方法的优点在于将二维问题转化为一维问题,算法复杂度大大降低;缺点在于对于形状比较规则的目标有较好的凝聚效果,不适用所有形状的目标[2],特别是形状复杂、多个强反射点的目标,很容易在方位维或者距离维出现分裂和闪烁,给后续的航迹处理造成很大的难度。
本文针对上述问题,设计了一种基于DBSCAN聚类[3-4]的雷达点迹流处理方法,该方法对来自信号处理的实时视频数据流,采用基于密度的DBSCAN聚类算法进行凝聚,提取点迹。相比传统的滑窗检测方法,此方法对目标的形状和大小不敏感,不容易出现分裂现象,因此目标也不容易出现闪烁。
1 DBSCAN聚类算法
点迹凝聚的主要工作是接收数字视频信号,将分布在不同波束、不同距离单元的同一个目标的回波数据聚集为一个簇。由于不能预知探测范围内目标的个数,所以不适用于需要目标个数先验知识的聚类算法。本设计选用了基于密度的DBSCAN聚类方法,该方法不需要知道目标的个数。
假设一个样本集为D,D=(x1,x2,…,xn)。
E邻域集:对于样本xj∈D,其E邻域集为样本集D中与xj距离不大于E的子样本集,即NE(xj)={xi∈D|d(xi,xj)≤E},子样本集的个数为|NE(xj)|。
核心对象:对于样本xj∈D,如果其E邻域集中包含的样本集的个数不小于Pmin,即|NE(xj)|≥Pmin,则xj则为核心对象。
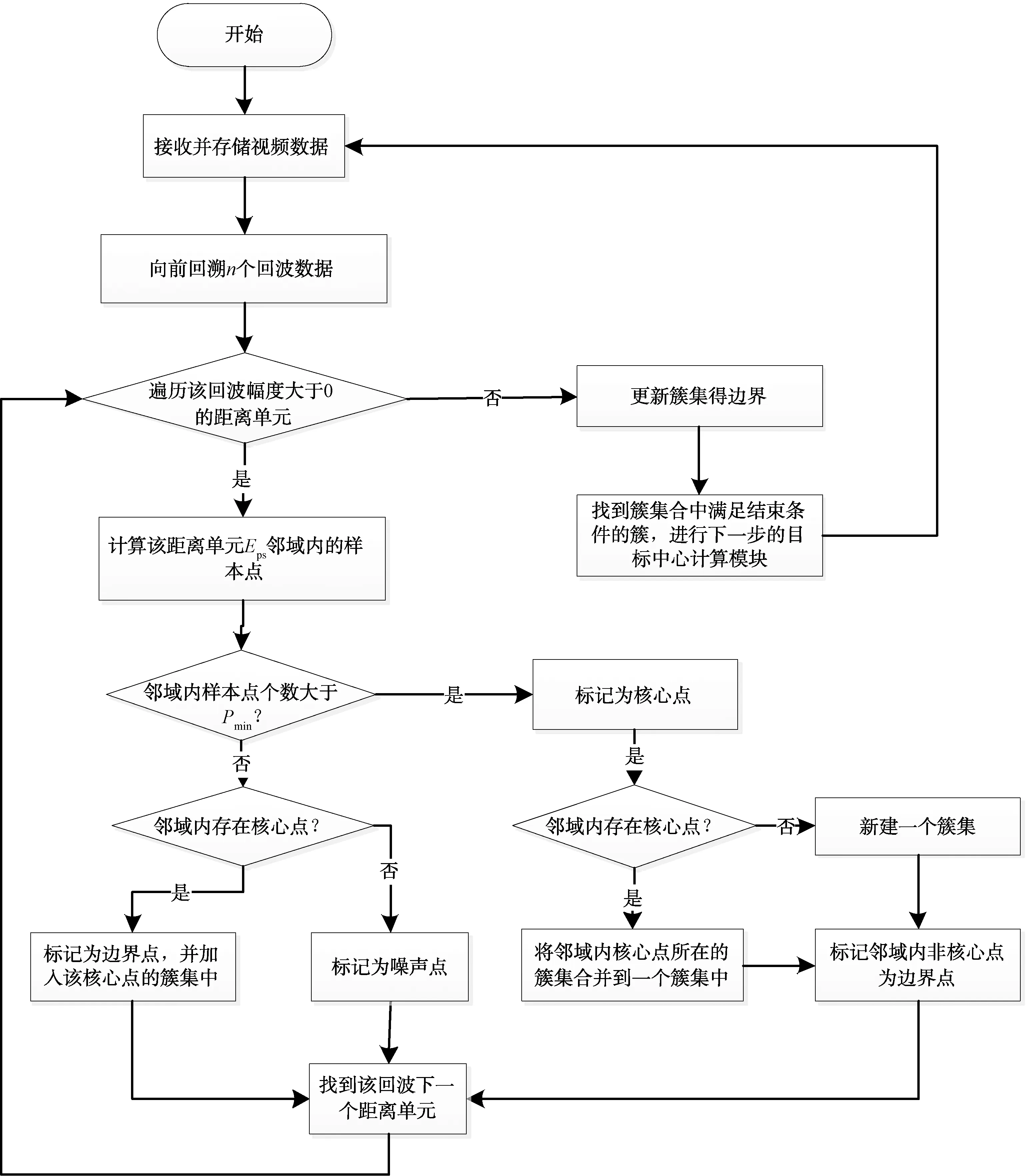
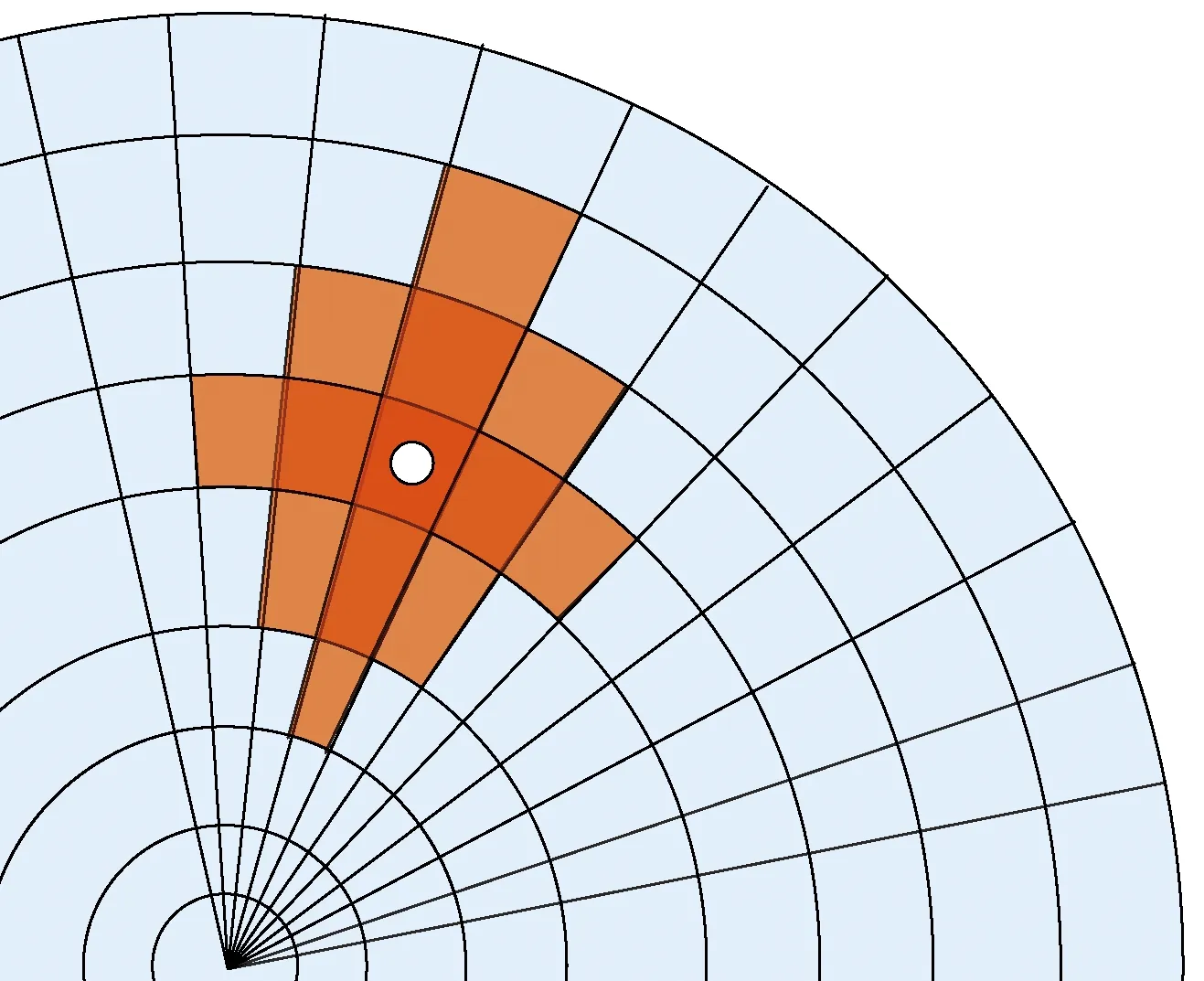
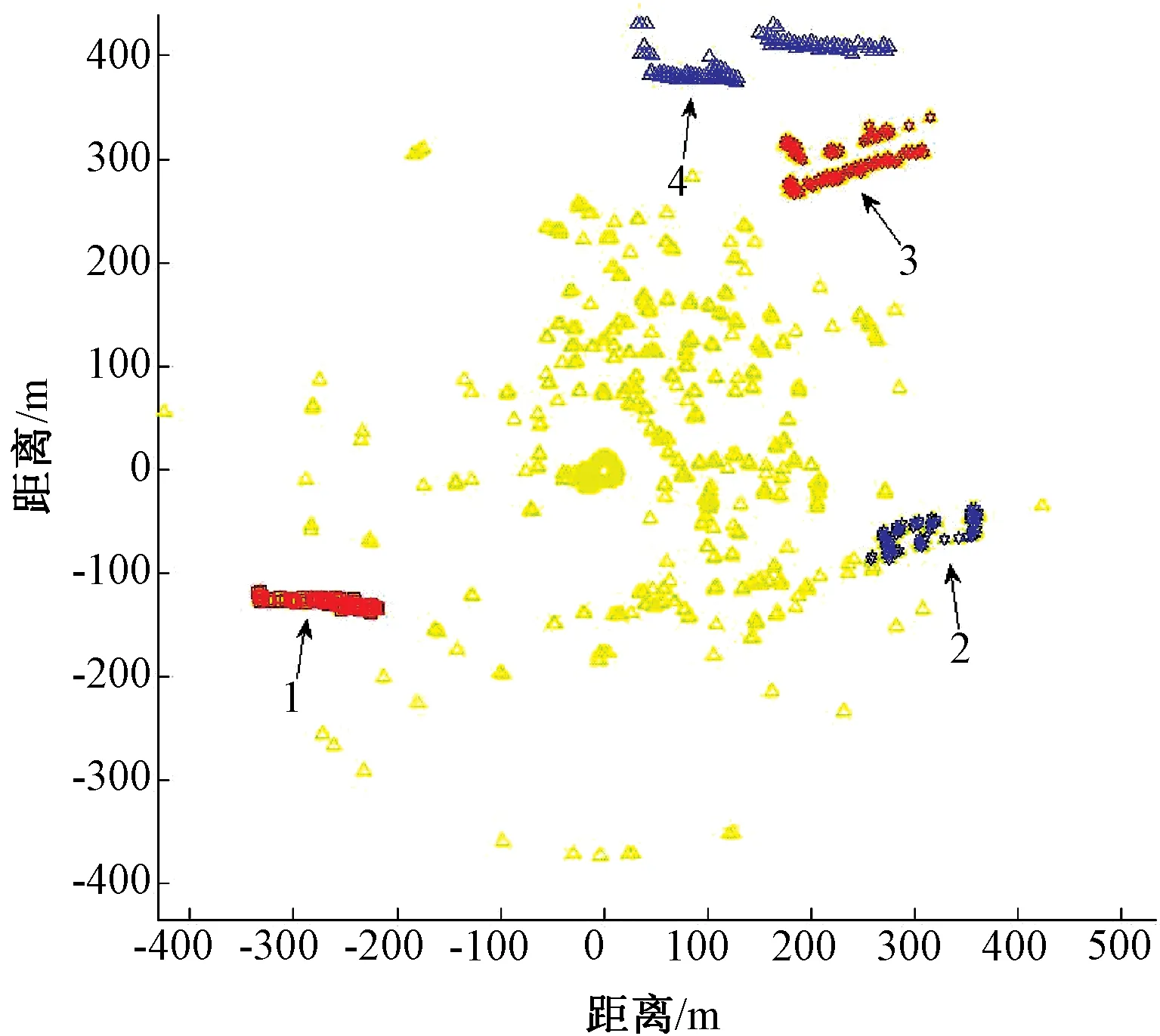
边界对象:对于样本xj∈D,如果其E邻域集中包含的样本集的个数小于Pmin,即|NE(xj)| 孤立对象:对于样本xj∈D,如果其E邻域集中包含的样本集的个数小于Pmin,即|NE(xj)| 密度直达:对于样本xj∈D、xi∈D,如果xj是xi邻域集中的一个样本点,且xi为核心对象,即xj∈NE(xi)且|NE(xi)|≥Pmin,则称xj密度直达xi。由于xj不一定是核心点,因此xj不一定密度直达于点xi,所以密度直达是非对称的。 密度可达:如果存在一个对象链x1,x2,…,xn,对于任意i均有xi+1密度直达xi,则xi+1从xi密度可达。 密度相连:对于样本xj∈D、xi∈D,如果xj和xi密度可达样本集D中同一个样本,则称点xj密度相连点xi。由定义可知,密度相连是对称的。 图1为DBSCAN算法的示意图,其中Pmin=4,E大小如图1所示,建立的簇实际上是一组“密度相连”的对象,对噪声不敏感,因此其可以实现任何形状的聚类。但需要根据经验指定输入参数和MinPts,因此不适用于数据密度差异较大的情况[5]。 图1 DBSCAN算法示意图 (1) 信号处理后的数据为方位-距离二维数据,因为探测的为水面目标,不会出现目标交叉的现象; (2) 探测目标个数不确定,根据探测范围内水面的船只个数实时变化; (3) 水面目标的大小差异大,因为连续波时宽带宽积大,距离分辨力高,对于大型船只,目标跨越距离单元和方位单元较多; (4) 因为水面目标姿态的原因和目标强发射点的分布千差万别,探测到的目标外形没有规律; (5) 由于雷达扫描范围是一个以雷达为中心的圆,雷达扫描距离单元密度分布不均匀,距离雷达越远,距离单元的密度越低。 雷达接收来自信号处理的实时视频数据流,不同于事后处理可以先获取数据,再给出有限个结果,实时数据流模式下,接收数据和处理数据是同时进行的,在接收数据的同时,需要不断给出处理的结果。因此设计一种基于DBSCAN的流处理方法,其中视频数据流中包含方位码、距离单元号、距离单元幅度值,取每个距离单元的中心作为位置,每个距离单元即为DBSCAN算法中的一个样本点。按照DBSCAN算法的定义,将样本点分为核心点、边界点和噪声点3种,样本点经过DBSCAN聚类算法处理后,形成一个个簇集。 当数据处理接收到一个完整的回波视频数据时,开始进行处理,流程图如图2所示。 图2 视频数据聚类流程图 该方法的特点主要体现在3个方面:回溯起始处理、E和Pmin的参数设置、簇结束判断准则。 (1) 回溯起始处理:假设当前接收到第k个回波数据,在此流水线处理过程中需向前回溯,处理第k-n个视频回波数据,向前回溯是为了使当前收到的回波数据已经完全覆盖第k-n个回波数据的Eps邻域,所以n的取值和聚类算法中距离阈值E相关,当E增加时,n也需要相应地增加。 (2)E和Pmin的参数设置:DBSCAN算法一般不适于密度差别较大的情况,因为密度差别较大时,同样的E邻域内样本点个数不同,需要根据密度的变化动态调整E值。本文在计算样本点距离时,不采用计算量较大的欧式距离,而利用距离单元差代表目标径向上的距离,回波序号差代表样本间切向上的距离,综合考虑距离单元差和回波序号差来衡量样本间的距离。E值设置时,采用统一的大小,计算距离时采用如下的计算方法: |R(i)-R(j)|+|I(i)-I(j)|≤E (1) 式中:R(i)为i所在的距离单元号;nI(i)为i所在的脉冲重复间隔(PRI)序号。 采用距离单元差和回波序号差来计算距离的好处是,对于任一个样本点,同样的距离单元差和回波序号差,邻域内包含的样本点个数相同,个数为2n×(n+1),所以密度是相同的,不需要再考虑距离单元密度分布不均匀的问题。图3为E=2时邻域示意图。Pmin取值时考虑到同样大小的目标在近程占据的角度更大,在更多的PRI中检测到目标,Pmin设计为由近及远越来越小,使得近程的邻域内需要更多的样本点,才能聚类为核心对象,从而可以抑制近程的杂波。 图3 E=2邻域示意图 (3) 簇结束判断准则:在判断簇是否结束时,考虑2个方面,一个为该簇所在的最大波位与当前处理到的波位距离是否超过距离阙值E;还有一个为当前簇的方位跨度是否超过聚类空间范围的要求。满足其一,则将该簇移出簇集合,做下一步处理。 本文对长江航道中进行试验录取的视频数据进行处理,验证方法如图4所示。其中雷达为连续波机扫体制,距离单元为4 m,脉冲重复频率为4 096 Hz,扫描周期2 s,最大量程为2 km,其中因为带宽限制,录取的视频数据经过了PRI抽取,抽取率为14帧PRI中抽取1帧。 图4 DBSCAN算法验证方法框图 场景中包括的船只种类比较丰富,验证对不同尺寸的目标进行聚类,参数设置为Pmin={12,6,4,4,3,3,3,2},E=15。Pmin值设置时按照量程将探测范围分为8段,每250 m为一段,分别设置Pmin值。由图5可知,共凝聚10个目标,其中根据大小可分为3类,目标1为大型目标,目标2、3、7、8、10为中小型目标,目标4、5、6、9为小型目标。由结果可知,DBSCAN的算法可以同时实现不同大小和形状的目标聚类,同时还可以给出目标的特征信息。以目标1为例,其包括214个样本点,方位起始序号为2 972,方位终止序号为3 750,方位跨度为778,起始距离单元号为156,终止距离单元号为249,距离跨度为93。 图5 不同大小目标聚类效果图 图6为近程的聚类效果图,图6中一共有4个目标,其中近程的杂波并未聚类成目标,说明近程设计较高的Pmin值能够抑制杂波聚类成点迹,同时可见250 m范围内的目标1聚类成功,说明参数设置得当,目标并不会被抑制掉。 图6 近程聚类效果图 由以上的实验数据分析后可得,DBSCAN聚类算法对于任意大小和形状的目标能够很好地实现目标视频数据的凝聚。在给出位置信息的同时,还可以挖掘出丰富的目标特征信息,比如样本个数、方位距离宽度等信息,方便后续的点迹关联,形成航迹。但是DBSCAN聚类算法的效果依赖于E和Pmin的选取,目前可以根据雷达的距离单元大小、PRI大小、量程大小、扫描周期等来设定,但还需要根据雷达探测的场景对参数进行微调,以达到更好的聚类效果。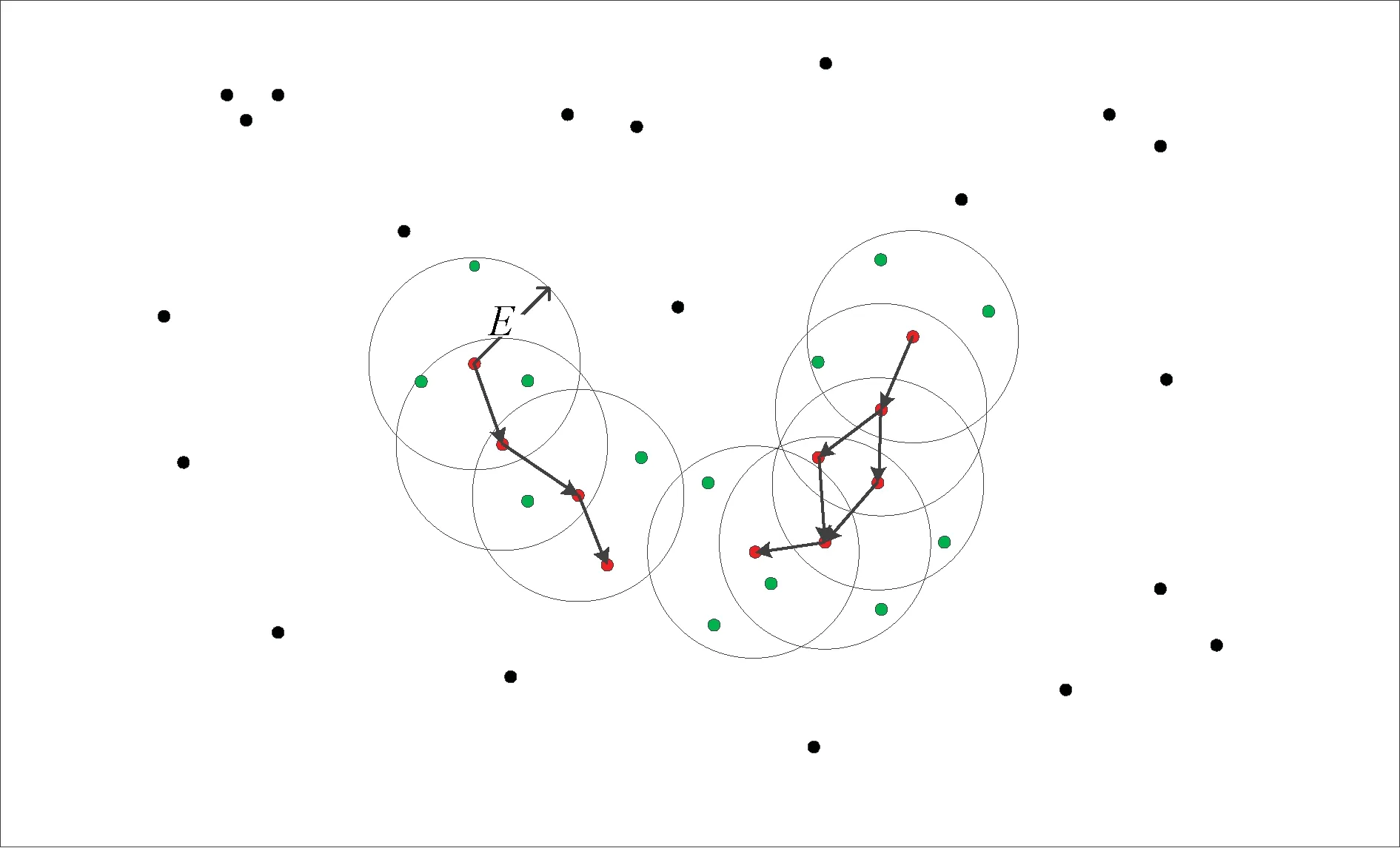
2 雷达点迹处理方法
2.1 水面目标的特点
2.2 雷达点迹处理方法设计
3 算法验证


4 结束语
