NAVIPILOT-4000自动操舵仪故障分析及其解决方案
2021-11-08谢涌储凌剑李磊中国卫星海上测控部
谢涌 储凌剑 李磊 中国卫星海上测控部
随着航运事业的快速发展以及日趋成熟的数控技术在船舶上的应用,自动操舵仪在各种船舶上普遍运用,由于它能自动驾驶船舶按给定航向航行而且具备航向精度高,能节约能源,把人从繁重人工操舵中解放出来。然而越是高度集成化的电路,其可靠性越容易受到海上复杂气候环境的挑战。针对进口NAVIPILOT-4000型操舵仪设备性能和故障现象进行了分析,总结了一套安全可行的设备操作经验,对设备实例故障给出了有效的技术解决方法。
1.NAVIPILOT-4000型操舵仪的主要性能
NAVIPILOT-4000型操舵仪由美国斯伯利公司研制,是目前国际先进的操舵仪,它的性能优越,操作简便,是现在大型船舶广泛使用的一种操舵仪。在主操作台上可以进行随动、自动、电动(应急)等方式的操作。NAVIPILOT-4000型自动舵系统如图1所示。NAVIPILOT-4000的功能标准包括:
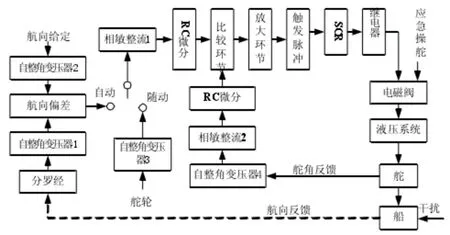
图1 NAVIPILOT-4000型自动舵系统方框图
(1)以极少的舵的移动来保持航向;
(2)通过设置旋转率和旋转半径来控制航向的改变;
(3)设置舵的限制(设置旋转率或旋转半径);
(4)两个额外的非独立的模拟输出,与舵令相称或与舵角误差对应;
(5)直接RS-422连接到外部首向参考物或航行系统;
(6)通过显示单元和声音单元报警。
2.NAVIPILOT-4000型操舵仪的操作特点
NAVIPILOT-4000型操舵仪是船舶航行保障的重要设备,在主操纵台上可以根据船舶在航区域的复杂程度,有针对性的选择随动操作、自动操作、电动操作等方式的操作,但具体操舵方式由当班驾驶员根据具体情况决定。显示面板如图2。

图2 NAVIPILOT-4000型自动舵显示面板
2.1 随动操舵控制
随动操舵的控制是NAVIPILOT-4000型操舵仪操作使用中最简单可靠的操作方法,通过信号发生源(舵轮)给定电信号,经信号放大器,把放大的信号送到接收执行机构,由执行机构控制舵的转动方向,信号反馈主要作用是用来反馈舵的转动情况,将信号反馈给信号发生源。随动操作一般在靠离码头、进出港湾、狭水道、岛礁区、捕捞区、雾航、避让、通航密集等水域采用。
2.2 自动操作控制
自动操作控制是在原随动控制的基础上,增加了计算机系统和航向反馈系统,用计算机将舵角反馈回来的情况数据和航向反馈系统反馈回来的航向变化情况数据进行统计,然后与原定的航向进行比较。如果有差异,则计算机自动控制系统再次施舵,直至调整到原航向为止,一般在能见度好、直航线长时间航行的情况下使用。
2.3 电动操作控制
电动操舵控制是直接控制继电器工作,使舵机转动的系统,其最大的特点是没有反馈。电操手柄相当于继电器开关,操舵时当舵角指示器达到所需的舵角时,要立即将手柄松开回到中间位置,舵机立即停止工作,保持舵角不变。如果需要回舵,应将手柄向右,使继电器接通,右触点闭合,舵机电源经右舵触点启动舵机,使舵回转,当舵角指示器正舵时,立即松开手柄回到中间位置,一般主操作台无法操作时使用的应急操作。
3.NAVIPILOT-4000型操舵仪操作使用中出现的故障分析
3.1 NAVIPILOT-4000型操舵仪航向控制模块死机
NAVIPILOT-4000型操舵仪是当前较为先进的操舵仪设备,此设备集成化程度高,系统组成复杂。2013年在大洋上采用自动方式航行时,航向控制模块出现了死机现象,后经与厂商技术人员电话联系和我船业务骨干分析排查判断认为是核心数据处理器单片机出现了故障,通过进一步的分析检测排查判断结果正确。我们知道自动舵的核心数据处理器是单片机,在正常情况下操作时,其实就是给单片机一个指令,来控制自动舵的,同时此设备相应也会根据事先编写好的程序给一个反馈,若某一个指令使单片机程序进入了死循环无法跳出时,就会出现“死机”现象,正是因为单片机程序进入了死循环无法跳出,所以出现了模块死机。
3.2 NAVIPILOT-4000型操舵仪在自动模式状态航向控制有偏差
NAVIPILOT-4000型操舵仪是目前较为先进的操舵仪,在自动航行状态模式下,它能根据当时航向偏差的实际情况进行自动控制调节航向,始终能保持船舶在给定的航向上航行,且具有以极少的舵的转动来控制保持航向这个功能。但是在实际运用中出现给定的航向与实际航向不一致,当前航向偏离给定航向2-3°,偏离的航向不能及时恢复到给定的航向,自动舵既不调节航向偏差也没有压舵信号的反应的控制,使操舵的航向一直偏离在2-3°的航向上航行,经过调整设备的运行参数设置,舵角限制的大小,天气调节,偏航设置,没有解决此问题,通过查找资料分析排查,发现显示航迹模式里的横移量参数基准值没有,而航迹参数基准数值是计算航向偏差修正的基准,此数值的缺失影响了自动舵在自动模式航行自动调节航向偏差的原因,导致了航向的偏离。
3.3 NAVIPILOT-4000型操舵仪显示面板的报警
NAVIPILOT-4000型操舵仪显示面板的报警常见的报警有偏离船首向报警、无电罗经信号输入报警、无计程仪速度报警、航向数据源丢失报警、设置首向误差限制报警、设备出现异常故障报警等,其中只要出现报警的一种,就说明设备出现了故障,要立即进行检查排除,直到报警消除。当该处显示ALARM时,会出现一个或多个报警情况。要根据报警情况逐个排查,以免影响设备正常工作。当报警被消除确认后就会变成静态,如果报警是由偏航产生的,就会显示 OFF HDG。如果是无计程仪速度报警,就会显示OFF LOG SPEED。NAVIPILOT 4000的报警系统为操作人员及时提供错误的声音和视觉提示,方便操作人员及时排查设备的问题消除故障隐患,保证设备能正常工作。
4.NAVIPILOT-4000型操舵仪操作使用中故障的处理
NAVIPILOT-4000型操舵仪是目前大型船舶上使用比较普遍的一种操舵仪,由于设备本身的性能优越和使用的可靠性较强,深受船商的喜爱,但在操作使用过程中,也会出现一些设备的问题,为了大家能更好的了解运用解决此设备出现的问题,我把遇到的问题及解决处理的做法同大家进行交流,以供参考。
4.1 NAVIPILOT-4000型操舵仪航向控制模块死机的故障处理
NAVIPILOT-4000型操舵仪设备集成化程度高,系统组成复杂,2013年在使用过程中出现的模块死机的现象,在处理过程中,我们的业务骨干分析了航向控制模块出现死机的几种可能,一个是电器元件寿命已到故障,二是电源供电故障,三是线缆连接松动故障,四是某个程序数据处理器错误故障,经分析检测排查前三项均正常,而后断定是某个数据处理器错误故障而导致设备模块死机,控制自动舵的核心数据处理器是单片机,在正常操作时其实就是给单片机一个指令,而这个指令使单片机程序进入了死循环无法跳出,就出现“死机”现象,要解决此问题这时有两种方法,一是人为地在给他一个“brake”指令(自动舵的单片机的程序已经是烧录好的,这里是无法改变的),二是从新运算(也就是关机重开机)故障分析判断与厂商建议相同,通过关机重启设备工作恢复正常。
4.2 NAVIPILOT-4000型操舵仪在自动模式状态航向控制偏差的处理
NAVIPILOT-4000型操舵仪在自动模式状态航向控制偏差的处理,我们知道在使用自动舵航行的时候,航向偏差变化全由自动舵本身来自动调节控制的,但在实际运用中出现不能及时压舵回舵控制航向的问题现象,对出现的问题现象进行了分析,也调整了设备的运行参数设置,对舵机限制的大小,天气调节,偏航设置,进行了重新设置,没有解决此问题,当前航向还是偏离给定航向2-3度的航向航行,后通过查阅资料说明,在改变显示选项菜单里,显示航迹模式里的横移量参数基准值没有且基准值为零,而这个横移量参数是控制偏航计算的基准值,这个基准值没有,计算机计算就没有基准,自动舵就不能自动控制偏航,所以,自动舵不能及时调节航向偏差,使航向一直偏离在给定航向2-3°的航向上航行,后根据试验的要求,在自动航行模式状态下,按左和右的顺序,以一定的速度,一定的舵角,分别在30°和90°两不同航向进行试验,通过试验设备自带的计算机会自动记录存储显示航迹模式里的横移量参数,只要有了这个参数值,航向控制偏差的问题就解决了,这在以后的工作中得以验证。
4.3 NAVIPILOT-4000型操舵仪显示面板的报警处理
NAVIPILOT-4000型操舵仪显示面板上的报警处理,在正常使用的情况下,出现一般数据瞬间丢失报警故障,蜂鸣器响起ALARM会显示闪烁,通过手动消音,蜂鸣器停止ALARM闪烁消失,等数据链接恢复了故障现象消失。此报警对正常使用影响不大。如果出现系统异常故障报警,蜂鸣器响起,手动消音也不能消除蜂鸣器响声,ALARM会不停的持续显示闪烁,那么,就必须检查系统报警产生的原因,分析判断故障报警的部位,是属于系统电路、电器、电源部分的,是机械部分的、还是其他方面的,一定要弄清楚,不盲目从事,面板上一旦出现了这其中一种或几种报警时,要做好基础记录,检查报警发生的相关信息,分析报警产生的原因,判断报警对使用的影响,密切监视设备运行的状态,在没有弄清楚报警产生的原因和报警显示未消除的情况下,绝不随意操作动用设备,杜绝人为事故的发生,针对不同的情况进行分析判断,必要时停机检查,及时消除报警隐患,确保设备的使用安全,任何一个报警故障都会影响设备的操作使用,我们要根据设备故障的性质,进行定论处理,不能疏忽大意,必须认真仔细的对待,如果带故障报警强行使用就会损坏设备,也会影响到船舶的航行安全。因此,只有排除了设备故障报警后使用,才能使设备正常运行确保船舶的航行安全。
5.NAVIPILOT-4000型操舵仪使用注意事项
NAVIPILOT-4000型操舵仪是目前较为先进的自动操舵仪,它的使用功能较为全面,在实际运用中给操作人员带来了方便,减少了操作人员的劳动强度,体现出了它的功能优势,但是,为了保证设备的运行正常和船舶的航行安全,我们需要注意一下几个方面:
5.1 操作人员应具备扎实的业务技能
操作人员扎实的理论基础和过硬的业务技能是操作设备的前提和基础,如果我们的操作人员不具备这样的素质,那么,我们就不能很好的操作使用设备、掌控设备,也不能把设备的优势功能发挥出来,所以,运用好设备掌控好设备就必须要有扎实的理论基础和精湛的业务技能,才能使设备在操作时得心应手,操作自如。
5.2 操舵仪的操作必须严格受控
操舵仪是强弱电混合的精密电气设备,为了检验设备性能的可靠性,需在航行中做某种试验时,对设备工作状态作一些设置调试与改变,在选择使用前必须要符合航行试验大纲规定的要求,经船长或值班驾驶员同意方可进行,由业务熟悉的航海员和岗位操作精湛的人员进行操作,其他人员的操作在值班驾驶员、航海员、岗位操作人员的监视下方可操作,严禁擅自使用。
5.3 NAVIPILOT-4000型操舵仪应急操纵步骤
(1)当舵机出现控制系统故障时应当立即报告。
(2)如果泵故障,则在泵控制面板上对泵进行转换。
(3)当操舵仪控制系统出现故障时,应直接将操舵方式选择开关打至电动(NFU Sync)位置,进行应急操舵。在自动操舵模式下,可直接进行越控装置操纵。
(4)如果操舵仪系统模块发生故障时,则对两套系统模块进行转换。
(5)如果驾驶台操纵失控时,则将后舵房应急操舵控制箱操纵转换由远程模式转为为本地模式,进行舵机舱应急操舵。
(6)如应急操舵控制箱也不能正常操纵时,则利用舵机电磁阀操纵。
(7)转换完毕向驾驶台报告,根据驾驶员的命令进行操纵。
6.结束语
NAVIPILOT-4000型操舵仪是船舶主要的操纵设备,设备的好坏直接关系到船舶的航行安全,在使用过程中掌握操作好设备,人员不仅要有扎实的理论基础和操作技能,还需严格遵守设备操作规章,只有两者相结合才能确保船舶人命安全。通过对NAVIPILOT-4000型操舵仪性能特点介绍,指出了NAVIPILOT-4000型操舵仪功能在不同情况下的使用要求及调试方法,分析研究了设备在运用中出现的问题故障及解决办法,结合在实际使用中的情况,提出了需要注意的事项,为今后广大航海人员操作使用此种设备提供了有益的参考与借鉴。
