基于孤立森林的海面小目标检测
2021-11-03卢建索莲陈帅
卢建 索莲 陈帅
(1.中国电子科技集团公司第十四研究所 江苏省南京市 210013 2.南京国睿防务系统有限公司 江苏省南京市 210039)
1 引言
舰载监视雷达被用于探测海面小目标(例如潜望镜,小船和浮标)时,探测概率很低。这是因为,海杂波不仅受雷达自身参数的影响,同时还受到各种环境因素的影响,显示出明显的非平稳性,时空相关性和非高斯特性[1,2,3]。海面小目标的RCS 小,回波微弱,运动速度慢,具有较低的信杂比(Signal Clutter Ratio,SCR)。因此,基于特征的检测方法可有效的解决这类问题,该方法利用杂波和目标回波的一个或多个特征来实现海面小目标的检测。
随着雷达性能的不断提高,在检测海杂波背景下的小目标时,出现了越来越多的特征可以很好的区分海杂波与目标,并且这些特征之间的互补作用,使的基于特征联合的海面目标检测性能得到了很大的提高。通过利用雷达回波,水鹏朗[4]-[6]的团队在时域和频域提取了具有可分性的3 种特征——相对平均振幅(Relative Average Amplitude,RAA)、相对多普勒峰高(Relative doppler Peak Height,RPH)和相对多普勒谱熵(Relative Vector-Entropy,RVE)。又因为纯杂波和含目标的回波在归一化时频分布上表现出了不同的特性。通过这些不同的特性可以提取3 个时频特征:时频脊能量(time-frequency ridge energy,RI),二进制连接区域的数量(the Number of binary connection areas,NR)和最大连通域尺寸(the largest pass Size,MS)。基于极化目标分解理论,从极化域而提取了3 个极化特征,分别为相对体散射机制对应能量(Relative Surface cattering Power,PRS)、相对二面角散射机制对应能量(Relative Volume scattering Power,PRV)和相对面散射机制对应能量(Relative Dihedral scattering Power,PRD)。对海杂波的时频域特征进行分析,得出由时频域所组成的三特征测器,相较于分别从时域和频域所提取的三特征检测器,海面小目标的检测性能得到了一定的提高,然而并不能再所有数据上都有良好的检测性能。这表明,提取对海杂波和目标可分性较好的特征对于联合多特征检测器性能的提升至关重要。在极化域利用多极化的方式所提出的检测器与在单极化方式所提取检测器相比,检测器性能有了一定的提升。
但是三特征检测器性能的主要限制因素是目标回波落到多普勒域的主杂波内,会被其淹没,并且海面小目标的检测可能会遇到各种各样的目标,其目标的特征分布很难获的,将更多的特征联合起来,使其特征之间进行互补,可以有效的解决某一特征或者某几个特征的目标淹没问题。因此设计检测器可归结为在异常检测中设计一类分类器。在上述的三个3-D 特征检测器中,构造了一个基于3-D凸包学习算法(CHLA)的异常检测器,以找到3-D 特征空间中的决策区域。但是,CHLA 维度的约束限制了特征向量中变量的扩展。因此本文通过设计多特征联合来设计特征检测器,并利用异常检测中孤立森林异常检测算法来实现提高海面小目标检测的性能。
本文其余内容如下,首先介绍了雷达检测问题的数学模型,并分析已有的八特征。其次,介绍孤立森林异常检测算法,利用主成分分析对已有的八特征进行特征融合,并设计检测器。然后,利用实测数据集来评估所提出方法的检测性能。最后,得出结论。
2 雷达检测问题的数学模型及特征
2.1 雷达检测问题数学模型
从数学上,可以将雷达目标检测问题看作如下的二元假设问题:

假设H0表示待估计单元内不包含目标,假设H1表示待估计单元内包含目标。当信噪比较高时可以忽略噪声的影响。X(n),S(n),C(n)分别为雷达回波,目标回波和海杂波。
N 是接收到的回波序列长度。R 是待估计单元周围的参考单元,假设海面的局部均匀的,参考单元内的海杂波特性与待估计单元杂波特性基本一致,因此可以利用参考单元估计杂波特性。
2.2 特征分布
在已有的研究中,有八个特征——相对平均振幅,相对多普勒峰高和多普勒振幅谱的相对熵,时频脊能量,二进制连接区域的数量和最大连通域尺寸,相对平均功率(relative average power ,RAP)和相对多普勒谱熵(relative Doppler spectral entropy,RDE)[7],可以用来很好的区分目标和杂波,其特征分布如图1 其所示。

图1:特征分布
从图1 中可以看出,这八个特征目标和杂波的分布图存在明显的差别,其中海杂波的特征分布范围更广,因此可以用来很好的区分目标和杂波。在已有文章中,已证明这八个特征均适合于海面小目标检测。
由已有八特征[8]组成的数据矩阵如下:

其中f1(x),f2(x),f3(x),f4(x),f5(x),f6(x),f7(x),f8(x)分别表示对目标回波的RAA,RPH,RVE,RI,NR,MS,RAP 和RDE 的运算。令S0和S1分别为H0和H1假设下的特征矩阵:

其中fci和fti分别表示杂波单元和目标单元的回波特征向量。K是从一定范围区间分割的向量的数量。
3 基于联合特征的孤立森林检测器
3.1 孤立森林算法原理
孤立森林[9]的算法原理是由两部分组成,分别是孤立森林的构建以及待测样本平均深度的计算,如下所示:
(1)孤立森林的构建是通过构建n 个孤立二叉树(isolation tree,简称iTree),将这些树结合在一起共同组成了孤立森林。而孤立二叉树是构成孤立森林的基础,又因为该方法是以无监督的方式进行的,因此构造孤立二叉树的过程可大大简化为:①从由多特征共同构成的样本空间中,随机选取φ 个样本,构成子样本空间,并将这些样本放入树的根节点;②随机选取一个样本空间中的某一特征向量,并选取该特征数据集中的某一数据z,使该数据的大小刚好在该特征向量的最大值与最小值之间;③将数据z 作为节点进行划分,将特征向量划分成两个新的特征子空间,并将该特征向量中小于z 的数据放在当前节点的左边,把大于等于z 的数据放在当前节点的右边;④不断的递归步骤②、③,不断构造出新的子节点,当数据本身只包含一个样本或者当树的高度已经达到log2φ 时,递归过程终止。
(2)待测样本平均深度的计算。当n 棵孤立二叉树构建好以后,就形成了本文所需要的孤立森林。在孤立二叉树的形成过程中,样本的选择,特征的选择,切割点的选择都是随机选取的,所以,如果只用某棵单独的孤立二叉树进行测试,其测试结果的准确性无法保障。因此通过获取待测数据样本到达每棵孤立树的叶子节点所位于层数,来计算待测样本在每棵树的平均深度h(x),用平均深度来判断待测样本是否为异常样本。
3.2 多特征联合
主成分分析算法(Principal Component Analysis,PCA)[10],通过对原始的数据矩阵做线性变化,将其投影到不同方向上,并根据投影后的数据所包含的信息量的多少,选取其中信息量最多的数据将其保留,作为新的待用数据矩阵。投影后的数据矩阵中的每个列向量都对应包含了对应原始信息的比例,因此本文将利用PCA 将已有的八特征进行线性变换。
首先,将S0中的K×R 个正常样本中的90%的样本和S1中的K 个异常样本中的90%的样本,组成一个新的数据集用于构建孤立森林,由此可得新矩阵D 为:

D 是M×P 阶矩阵,其中,P=8 是特征数,M=a+b,a=floor(K×90%),b=floor(K×R×90%)。
待测样本的数据矩阵为

其A =(K-a),B =(K×R-b)。
其次,利用PCA 来获得特征融合向量,算法流程如下:
(1)对所有的样本进行中心化Dn;
(2)计算样本的协方差矩阵;
(3)对协方差矩阵进行特征值分解;
(4)以特征值大小进行排序,并根据该排序方式来对特征向量进行排序,可得到排序后的矩阵U0;
(5)得到新的样本集Y=DnU0。
最后,利用Y,来计算主成分分析后所生成的新的特征的数据贡献率向量S,公式如下:

利用向量S 与矩阵Y 可得到用于构建孤立森林的样本集T,待测样本集TT。

3.3 基于孤立森林的检测器
基孤立森林的海面小目标检测与以往的基于孤立森林的异常检测不同,这是因为雷达目标检测对虚警概率有非常严格的要求,因此本文在孤立森林异常检测算法的基础上,构建了基于虚警概率的孤立森林异常检测器。
构建基孤立森林的海面小目标检测器的流程可分为两步,如下所示:
(1)在孤立森林生成阶段:通过选取由RAA,RPH,RVE,RI,NR,MS,RAP,RDE 八个特征所组成的数据矩阵T 中样本,随机生成了所需的t 棵孤立树,这些孤立树共同组成了孤立森林。
(2)在检测阶段完成海面小目标的检测器的设计:将本文八个特征所组成的数据矩阵TT,作为待测样本集。每个待测样本均需要遍历所有的孤立树,并计算待测样本到达每棵孤立树平均深度h(x),并对h(x)进行从小到大的排序,并以排序为A+B×PF 所在位置的高度Ht 作为检测门限,判决公式如下

由此可得孤立森林的算法过程,如图2所示。
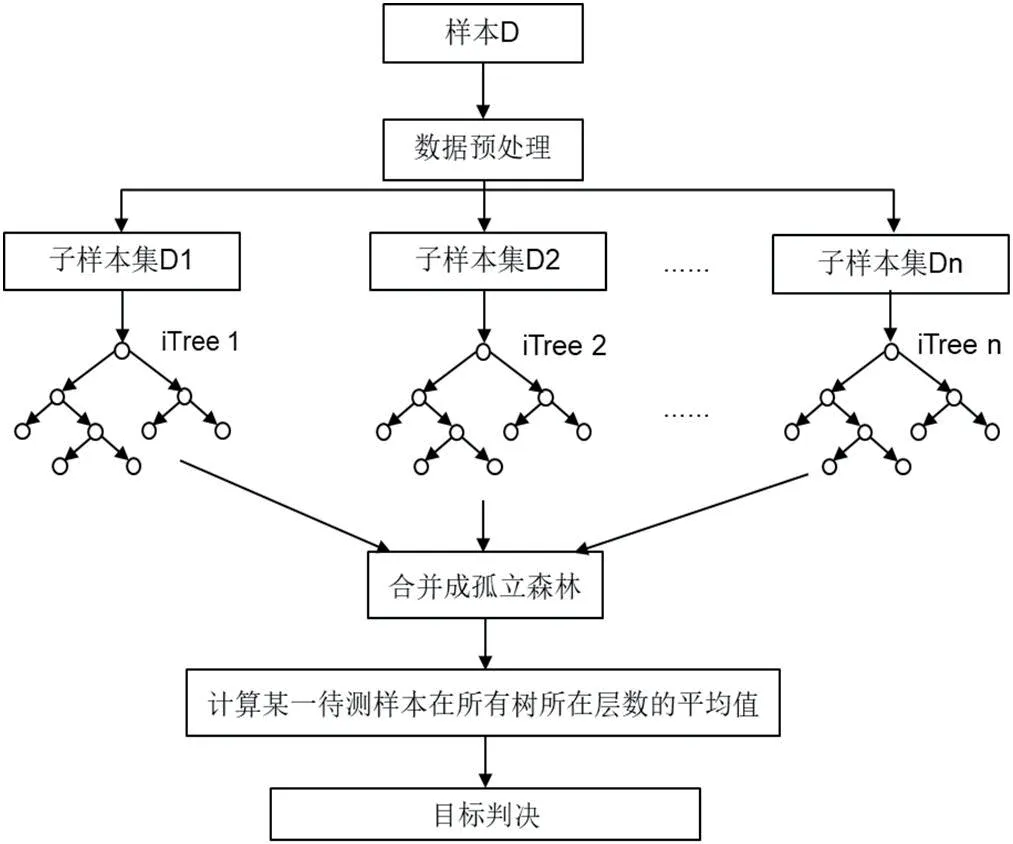
图2:孤立森林异常检测算法流程
4 实验结果分析
4.1 实验数据集——IPIX数据集
加拿大大学——McMaster 大学的Simon Haykin[11]教授于1993年和1998年分别进行了两次雷达海杂波实测数据收集的实验,并于2001年首次在网上公开发表,为世界各国学者经行对海目标探测的研究提供了有利的数据基础。该实测数据集数据收集所使用的雷达X 波段雷达,因此将该雷达称为IPIX 雷达,将该数据集称为IPIX 实测数据集。
本文所使用的10 份数据来自于1993年IPIX 数据集,IPIX 雷达的具体参数如表1所示。该实验中待检测目标是被铝丝包裹直径1m 的漂浮圆球。十份数据集的具体信息如表2所示,每份数据包含N=217个采样数据。

表1:IPIX 雷达具体参数

表2:IPIX 雷达十份数据基本信息
4.2 检测性能
图3为虚警率为0.001,观测时间为0.512 秒,本文所提出的方法与已有方法中的三特征检器,时频特征检测器,极化特征检测器,分形特征检测器,在四种极化方式下检测概率的比较。从图中,我们可以看出本文中所提出的检测器利率明显高于已有的检测,平均检测概率为92.91%,其次是时频特征探测器,其平均检测概率为67.69%。因此可以得出本文所以出的检测器相较于已有的检测器,检测性能提升了25.22%。

图3:十组数据的检测概率
图4为观测时间为0.512 秒,十分数据在四种极化方式下,采样数目固定为32 时,检测性能随孤立树的数目变化的直方图。从图中可以得出以下结论,交叉极化方式下的检测性能明显比同极化方式下的检测性能好,并且随着孤立树数目的增加而不断增加,海面小目标的检测性能随之增加,当孤立树的数目达到100 棵时,检测性能的提升达到最好。

图4:采样数目固定为32 时,检测性能随孤立树的数目变化
图5为观测时间为0.512 秒,十分数据在四种极化方式下,固定孤立树的数目为100 棵时,检测性能随采样数目变化的直方图。从图中可以看出,随着采样个数的增加检测性能的提升一开始增加的很快,当采样数目到达32 以后,随着采样数目的增加,检测性能逐渐下滑。

图5:孤立树的数目为100 时,检测性能随采样数目的变化
综上所述,基于孤立森林的海面小目标的检测,孤立树的数目选取为100 棵,采样数目为32 时,检测性能达到最好。
5 总结
本文将海面小目标的检测检测问题看作异常检测检测问题,基于八特征融合,提出了一种基于孤立森林的海面小目标检测方法。利用已有的八特征数据进行孤立森林的构建,并利用虚警概率与待测目标在每棵树的平均深度h(x),进行检测。实验结果表明,利用孤立森林异常检测器,可以有效提高海面小目标的检测性能。通过比较不同的孤立树的数目,和不同采样数目下的检测概率,可以看出在孤立森林异常检测的过程中,当孤立树的数目达到100,采样数目为32 时,检测性能呈现最好的效果。
