基于开源软硬件的多功能FDM型3D打印机研究与开发
2021-10-26刘磊吴建
刘磊,吴建
(1.新余学院机电工程学院,江西 新余 338004;2.芜湖职业技术学院,安徽 芜湖,241000)
0 引言
3D打印技术是一种增材制造技术,它将数字化模型切片分层,按照一定的截面轨迹,运用PLA、ABS、粉末金属、光敏树脂或者食品原料等材料,通过逐层打印,层层叠加累积的方式来建构实物,能够将人们的创意和想法迅速变成现实。它的出现,颠覆了传统的加工技术,无需机械加工或模具就能将数字化模型直接变成实物,极大地缩短了产品的生产周期,为个性化、小批量生产带来了便利[1]。目前,3D打印技术已广泛于汽车、航空航天、生物医疗、建筑、食品加工及文物修复等诸多领域,具有极大的市场潜力,势必成为未来突破性技术之一。
目前,常见的3D打印技术主要包括立体光固化成型SLA、选择性激光烧结SLS、选择性激光熔融SLM、三维印刷工艺3DP、熔融沉积成型FDM等。其中,FDM技术由于成本低、可选材料多、工艺简单等因素,受到众多DIY创客的关注,开发了多种多样的开源FDM型桌面3D打印机,让3D打印这个新兴技术真正走进了普罗大众。
针对目前国内外FDM型桌面3D打印机存在的打印精度不高、功能单一、打印速度较慢等问题,本文采用开源软硬件系统,设计开发了一台打印精度高、打印速度快、稳定可靠、挤出系统模块化的多功能FDM型3D打印机,具有一定的创新性和实用性。
1 3D打印机的机械结构设计
3D打印机的机械结构设计主要包括机身框架、运动系统、挤出系统等。
1.1 机架与运动系统
目前,FDM型3D打印机机型结构主要有Prusa i3(龙门架结构)、Ultimaker (十字轴结构)、Makerbot、Corexy等。考虑到不同挤出系统模块的更换便利性、可拓展性及方便升级维护,本设计采用开放式的i3结构。打印喷头完成Z轴和X轴方向的运动,打印平台完成Y轴方向运动,采用双z轴电机设计使打印头移动更加稳定。
常用的3D打印机运动系统传动方式有同步带+光轴、同步带+导轨和滚珠丝杆+导轨三种。为减少震动、提高打印精度和速度,方便维护,本设计XYZ三轴都采用滚珠丝杆+导轨传动方式[2]。由步进电机通过联轴器连接滚珠丝杆,带动丝杆转动,从而使丝杆上的螺母产生直线运动,再带动坚固在螺母上打印喷头或打印平台移动。各轴的运动范围由光电开关进行限制。3D打印机的结构如图1所示。
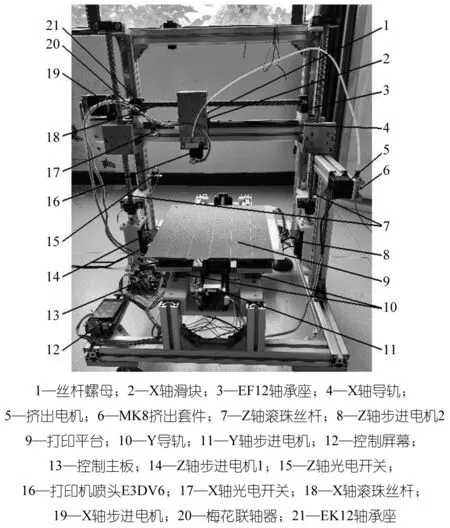
图1 3D打印机结构
1.2 挤出系统
为实现3D打印机的多功能化,本设计采用了两种挤出系统:线材挤出和气压挤出。可根据打印材料和应用场合的不同,随时更换,实现多功能打印。
线材挤出可打印传统的PLA、ABS等线材,实现概念模型、文化创意产品及机械零部件的制造。挤出部分选用MK8远程挤出套件,喷头部分选用E3D V6组件,喷嘴直径0.4 mm,采用加热棒加热,热敏电阻测温。如图2所示。
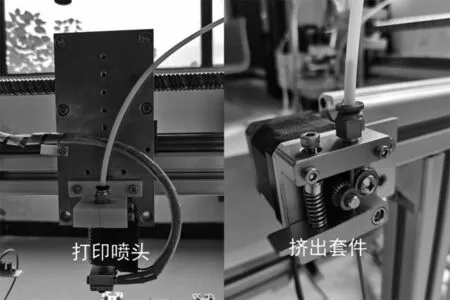
图2 线材挤出系统
气压挤出可用来打印巧克力等食材,还可应用于PDMS柔性传感材料的压电复合薄膜制备,为该材料的复杂结构制造、可穿戴电子器件及其监测元件的研究开发奠定基础。气压挤料系统由气泵、气动三联件(调压、过滤、干燥)、高频电磁换向阀(起气路开关作用)、点胶针头、点浇针筒(塑料和不锈钢两种材料)、针筒连接器及针筒支架组成。气动挤出系统原理图如图3所示。当需要打印时,电磁换向阀电磁铁通电(由继电器控制),左位工作,气体通过连接器进入针筒,将材料从针头挤出,打印在热床平台上。当空行程或无需打印时,电磁铁断电(由继电器控制),右位工作,针筒无气体进入,停止挤料。
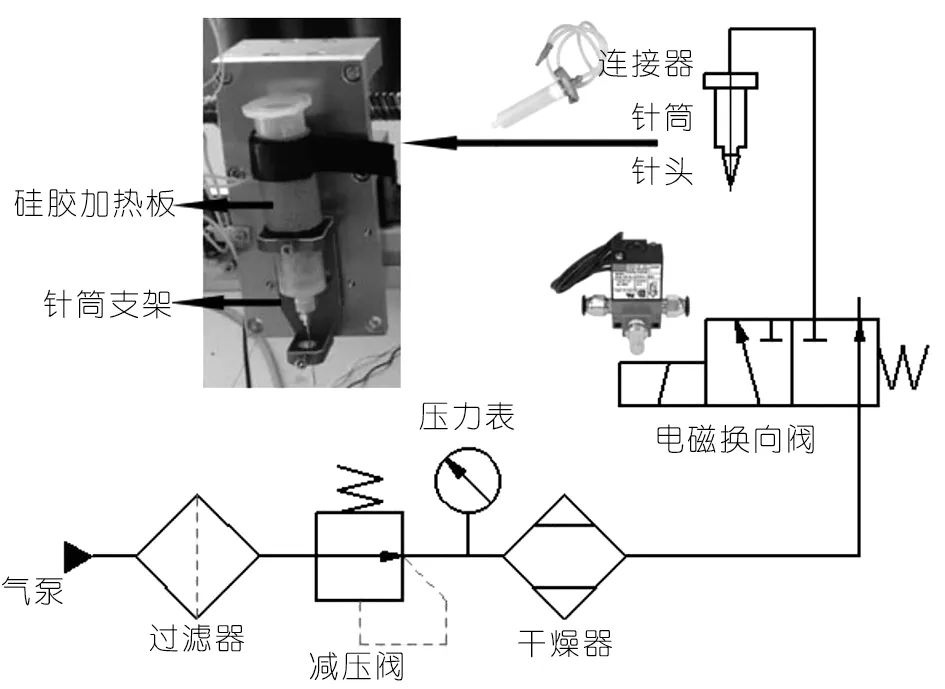
图3 气压挤出系统原理与组成
3D打印热床平台选用MK3铝基板,尺寸310 mm×310 mm×3 mm,电压24 V。采用电热丝加热,热敏电阻测温。
2 运动系统传动零部件计算与选型
2.1 滚珠丝杆螺母副选型
本设计X轴、Y轴和Z轴滚珠丝杆的工作行程都为300mm,单向定位精度要求±0.05mm,查阅温州上煜传动科技有限公司相关技术资料,选用C7级精度等级,其导程误差为±0.05 mm/300 mm,符合设计要求。
为保证足够的刚度,丝杆外径选用16mm。
设计要求X轴、Y轴进给速度最大为120mm/s,根据公式:Ph=Vmax60/inmax可确定丝杆导程[3]。电机通过联轴器与滚珠丝杆直联,故传动比i=1,步进电机空载时最大转速nmax一般可达到1 000 r/min,带负载稳定运行时nmax一般可取500 r/min,将数值代入公式,可算得丝杆导程Ph=14.4 mm,故最终丝杆导程按标准定为16 mm。由于3D打印机Z轴是间歇式按切片时所设定的层厚上升的,对进给速度无过多要求,为保证传动时的精度和刚度,选用小导程Ph=5 mm。
确定以上丝杆的主要参数后,查阅温州上煜传动科技有限公司相关技术资料,最终X轴、Y轴选用该公司SFE1616-L500单螺母型大导程滚珠丝杆模组,Z轴选用SFU1605-L500型模组,精度等级都为C7级,总长度500 mm,采用一端支撑一端固定的安装方法,以保证一定的旋转速度和较高的定位精度,支撑和固定配套的轴承座型号分别为EF12和EK12。联轴器选用SYC30梅花系列型,与所选丝杆和电机配套。直线导轨选用HGH20HA四方型、超重负荷、滑块上锁式导轨,其中X轴导轨为一条,长460 m;Y轴导轨有两条,长460 mm;Z轴导轨有两条,长400 mm。
2.2 步进电动机的选型
首先对Z轴的步进电机进行选型。在本设计中估算Z轴所带负载(包括螺母座、滑块、固定板、X轴零部件及挤出系统)重量约为Mw=20 kg,丝杆重量为Mb=2 kg,丝杆导程Ph=5 mm,丝杆直径D=16 mm,摩擦系数(垂直安装时为1),机械效率,Z轴移动速度Vmax=80 mm/s,步进电机加减速时间为t=0.1 s。根据公式计算如下:
负载的转动惯量:

负载和丝杆加速时所需总转矩
步进电机所需的最大驱动扭矩为加速运行时的驱动扭矩,即:TZ=Tf+Ta=0.3 N.m
根据以上计算,本设计Z轴电机选用57HBP56AL4型步进电机,端面尺寸为57 mm,转矩为1.2 Nm,带有断电刹车抱闸功能,能够防止Z轴上的零件部件在断电后下滑,保证安全。在空载时电机转速能达到1 000 r/min,额定负载下加速后稳定在500 r/min左右。配套的电机驱动器选用DM-542,最大支持64细分,驱动电路类似伺服控制,使电机低速运动平稳,无震动和噪音,可实现一个驱动器带动2个Z轴电机,实现双Z轴电机的同步运行,保证挤出喷头系统的水平和稳定。
X轴、Y轴步进电机的选型计算方法同Z轴,也采用57系列步进电机,型号为MKS SERVO57B,保持转矩1.2 Nm,不带抱闸功能,采用广泛使用的DRV8825步进电机驱动模块。
3 3D打印机的控制系统设计
3.1 开源硬件
3D 打印机的开源主板根据其芯片分类主要有Arduino mega 2560、STM32、树莓派及ARM这四种。基于这四种核心,人们开发出了种类繁多,功能各异的3D打印机主板[4]。本3D打印机主控制板选用创客基地开发的MKS GEN_L主板。它将开源主板Ramps1.4和Arduino mega 2560集合到一块板子上,解决了Ramps1.4 组合接口繁琐、易出故障的问题;预留电机脉冲和方向输出端口,可外接DM-542等大驱动来驱动57系列、86系列等大电机,也支持 A4988、 DRV8825及TMC2100等常用驱动;最多支持5个电机。与主板配套的操控屏幕选用创客基地开发的MKS TFT35全彩触摸3.5"液晶显示屏,支持断电续打、断电保存、打完开机及WIFI等模块。
硬件都选择并安装好后,就可以进行接线了。包括电机相位线、电机驱动线、限位开并线、风扇接线、喷头和热床加热线、喷头和热床热敏测温线、电源接线及触摸屏接线等,将相应的接线头插入MKS GEN_L主板相应的卡槽位置即可。主板接线图如图4所示。

图4 主板接线图
3.2 开源固件
固件(firmware)是硬件设备的一种驱动程序,其作用是控制硬件来完成预期的设备功能,相当于PC电脑上的操作系统[5]。基于不同核心的开源主板往往对应不同的固件,如Sprinter 、 Marlin 、 Teacup 、OctoPrint及smoothieware等,每种固件都有其自身的特点,应根据3D打印机的功能要求选择合适的固件。
本设计选择使用非常广泛的Marlin固件。使用 Arduino IDE 打开 marlin.ino,切换到 Configuration.h 即可查看并修改该文件。主要需要修改配置的参数包括波特率、主板类型、挤出电机数量、挤出喷头数量、限位开关设置、喷头和热床温度配置、传感器配置、步进电机方向、XYZ轴和E轴挤出机每移动一毫米所需要的脉冲数及显示屏型号等。
以“XYZ轴和E轴挤出机每移动一毫米所需要的脉冲数”为例。本设计X、Y轴选用的57步进电机步距角是1.8°,细分数为16,那么 步进电机运动一圈就发生360/1.8×16=3 200个脉冲,X、Y轴丝杆导程为16 mm(即丝杆转动一周,丝杆螺母运动16 mm ),那么X、Y轴的分辨率为 3 200/16=200。Z轴丝杆导程为5 mm,那么Z轴的分辨率为 3 200/5=640。E轴挤出齿轮直径为10 mm,那么 E 轴分辨率是 3 200/( 10×3.14) = 101.86。如图5所示。
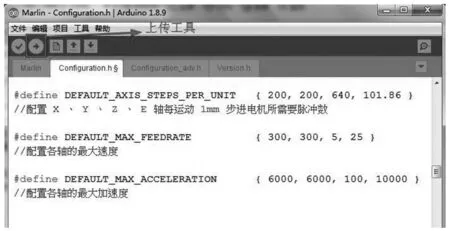
图5 固件修改与配置
固件修改好后,在Arduino IDE【工具】菜单中选择正确的主板型号和端口号,单击左上角的【上传】工具,就可将Marlin固件烧录到主板中。
4 结语
设计了一款基于开源软硬件的多功能FDM型3D打印机,利用UG软件完成了机架的结构设计,并对传动系统中滚珠丝杆螺母副和步进电机进行了计算选型。设计了线材和气压两套挤出系统,通过更换不同的模块,可轻松实现线材、食材及凝胶类材料的打印,以适应不同的应用场合,实现多功能打印。基于开源软硬件进行改造开发的,成本低,可拓展性强,性能可靠。
