水上清理工设计
2021-10-25徐洪波陈莹王涌霖冯焕程
徐洪波 陈莹 王涌霖 冯焕程
摘要:随着工业化、城市化加快,世界面临着水资源短缺、污染严重的挑战。而其中港口、湖泊、河流、海洋均受到不同程度的垃圾污染。机器控制方便、行动作灵活,可以实现复杂的空间轨迹控制,针对机器人的这种特性,我们生活中很多高难度繁重的工作都渐渐由机器人代替了。针对这一现象,设计了水上清理工,即水上垃圾收集船。水上清理工的垃圾清理主要是基于计算机视觉系统,STM32作为主要控制单元的控制系统,拥有太阳能充电系统。具有工作效率高、集装置空间大、作噪音小、能环保等优点。
关键词:垃圾;水上;收集船
1 引言
水是生命之源,生命摇篮。然而,水受到的污染正愈发严重,目前许多国家的河流、水域漂浮物污染十分严重,给人们的生存环境、投资环境和开发利用旅游资源等带来负面影响。传统的水面垃圾清理,主要是通过人为打捞,效率比较低,同时又消耗了大量的人力和财力,这些是仅靠人力是很难完成的。
水上清理工,即水上垃圾收集船的设计目的在于针对性的解决景区小面积水域以及不适合现有大型垃圾收集船工作的水面垃圾清理问题,代以往在这些水域使用的人工打捞方式。通过小型化设计和遥控器操纵实现简便高效的清理工作。以抗风浪能力强的小水线面双体船作为载体,电机驱动传送网带,网带上的勾臂可以确实有效的打捞漂浮垃圾,垃圾最终落入收集箱。为使船上有限的空间能够得到充分的利用,创新性的将机械伸缩机构应用在垃圾收集箱,使浸泡过水后有很强粘附性的轻薄垃圾,可以堆放到垃圾箱的底部,使垃圾箱逐步堆满而不会局部堆积。
2 系统总体设计
水上清理工的控制部分主要由觉子系统(即机器人的眼睛)、决策子系统(即机器人的大脑)、执行子系统(即机器人的神经网络)组成。通过视觉子系统把图像信息传给决策子系统,经决策子系统分析决策,把指令传给执行子系统,由执行子系统控制各机械机构执行动作。
水上清理工船体选择现今在船舶设计领域较为先进的小水线面双体船型,可以在提供相同浮力的情况下获得更大上层空间,且宽度比单体船大得多,其稳定性明显优于单体船,同时具有承受较大风浪的能力,还具有良好的操纵性,还具有阻力峰不明显、装载量大等特点。在船体两侧上放置太阳能电池板,在安装螺旋桨,而作业系统主要位于中间的船体,这样的设计不仅外观漂亮,而且结构合理,有利于船的平衡。船体采用工程塑料为外壳,外质较轻,质量较好,抗水面风险能力较强,并且可以减轻船体的重量,减轻船体的负担,还可以提高船的情形速度,此外,工程材料价格较低廉,大大降低了船的成本。
太阳能电池板位于侧边的两个船体表面,可以节约空间,利用电池板进行发电,电存储在蓄电池中從而进行利用,为了防止太阳能电池的寿命,增强其防腐,防雨,防污等能力,其材料采用玻璃合金,密封在表面增加玻璃板,而背面增加合金薄片。
打捞机械装置使用网状传送网带与网状勾臂,可以打捞绝大部分种类的水面垃圾,打捞过程中就可以过滤水份,减少船载质量,从而减少航行阻力。
水上清理工主控采用ST公司研制的STM32F1系列单片机,船身采用电机带动桨叶作为的动力输出和四轴上的舵机作为动力输出的辅助装置。辅助其实现更好、更灵活的运动模式。
水上清理工船身内安装两个步进电机,一个用来推进船体前进,通过步进电机的转动来带动螺旋桨的转动,给船提供前进的动力;另一个电机控制控制螺旋桨的转向,让船体实现转弯。步进电机在超载的情况下,电机的转速和所停的位置取决于脉冲信号的频率和脉冲数,它的旋转以固定角度进行,可以通过控制脉冲个数来控制角位移量,从而达到准确的目的,这样就可以通过控制步进电机来控制船体所停位置。
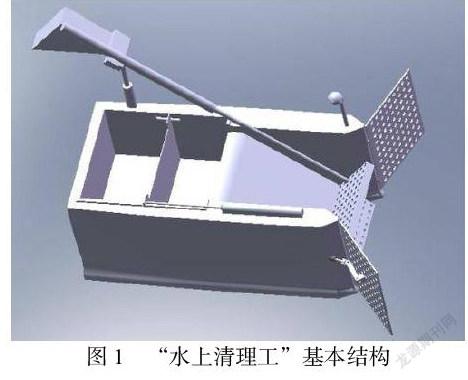
“水上清理工”基本结构如图1所示。
3 系统硬件结构
3.1 管理员模块:船体内设有报警功能,当设备出现问题时,可以给管理人员发出报警信号,这样可以在第一时间内将信息传达给管理人员,减少了等待的时间消耗,也防止问题因扩大化而产生的不必要的影响,同时管理人员可以远程监视设备的运行情况,远程视频监控,知道水上清洁工的具体位置。
3.2控制单元:当摄像头拍摄到垃圾时,将画面传送到相连的计算机或手机上,便可以手柄直接控制或者计算机通过蓝牙控制船行进到垃圾周围停止,远程控制船上的打捞机械装置垃圾收集行动,将垃圾收集上后放置在船身后方的收集装置中。收集装置满后,控制装置回到岸边,将收集的垃圾清理,即完成操作。船亦可自动运行,在水面寻找垃圾并自动处理,当电量不足时会发出警报信号。
3.3主控单元:水上清理工以STM32单片机为核心,它是一款高性能、低成本、低耗能的嵌入式控制系统,内核采用的是ARM32位Cortex-M3CPU,最高频率可以达到72 MHz,存储器采用6-64 k B的SRAM存储器,具有3个12位µs级的A/D转换器,最多高达112位的快速I/O端口,是集蓝牙控制和无线控制于一体的单片机控制系统。
3.4视觉系统:视觉系统是由海康威视ICS-IOT-TJ型号的视觉工业摄像头和控制器组成,通过视觉摄像头拍摄到存取码,识别后通过信息处理成为 ASCII码,再通过 RS232通信口进行视觉传感器和 计算机之间的通信,将 ASCII码传输给计算机,由 RS指令进行通讯。
3.5动力系统:为了实现环保、节能、高效的水上垃圾清理装置设计,水上清洁工采用磷酸铁锂电池作为动力源,同时配置光伏电池板收集太阳能。锂电池具有以下功能:
(1) 为船体的电机提供动力,能够实现船体在水上的前进及转向
(2) 为打捞机械装置收集垃圾提供动力。
利用太阳能电池板转化成电能存储蓄电池,提供电能,让电动机转动推力式采用双螺旋桨推动独立电机,分别位于船体两级架的后部,这样,控制就灵活,而且也有足够的动力。
3.6垃圾清理系统:垃圾清理系统主要由打捞机械装置和垃圾收集装置组成。垃圾收集装置采用硬塑料,在减轻质量的同时也防止腐蚀,机械装置可各方位收集垃圾。
4 结论
此装置为解决日益严重的水体固体垃圾而设计,水体垃圾的危害极大,清除垃圾刻不容缓,通过摄像头确定哪里垃圾多变停在哪,停下后可以开展工作。该作品适用于景区小面积水域以及不适合现有大型垃圾收集船工作的水面垃圾清理问题,可打捞大部分水面漂浮垃圾,如树叶,包装物等基于无线电遥控技术操控简单机动性,十分适用于公园或景区小面积水域内水面垃圾的清理工作。
参考文献
[1]孙强,王莎莎,荆世翔,等. 基于光伏发电技术的水上清理机器人动力系统设计[J]. 微计算机信息,2018,000(014):122-123.
[2]李金方,司丽丽,杨庆文. 螺旋渐进式水上清洁机器人设计方案研究[J]. 现代制造技术与装备,2009,000(003):13-15.
[3]陈玲. 无人驾驶技术在水面垃圾清理船上的应用分析[J]. 船舶物资与市场,2020(1):50-51.
[4]谢家兴,邱冠武,陈武瑞,等. 基于景区湖泊污染的多功能水域清理船设计[J]. 环境工程学报,2014,8(006):2371-2375.
[5]胡寿松. 自动控制原理(第四版)[M]. 科学出版社,2001.
基金项目:国家级大学生创新创业训练计划项目“水上清理工”(项目号:202110066019)