蛇形仿生机器人设计
2021-10-25代亚坤陈辰徐刚魏翔
代亚坤 陈辰 徐刚 魏翔
摘要:在许多突发事件中,精准的定位救援至关重要。比如在地震后废墟中精准找到被困人员;检查管道是否出现堵塞、裂缝等。这需要一个可以适用于多种地形的遥控机器人。相比与许多陆地动物,爬行类动物的运动方式可以胜任许多复杂的地形,例如沙漠、树林、废墟和沼泽湖泊等环境。因此,通过模仿爬行类动物的生理特点,设计具有在复杂地形移动能力的仿生蛇形机器人具有重要的科研与实际应用意义。项目设计蛇形仿生蛇形机器人,它由于其重心较低,因而具有稳定性强、运动灵活的特点,这使得蛇形机器人具有在复杂或未知环境具有很强的适应能力,因此在探险救援、防恐、危险环境作业等领域具有光明的应用前景。
关键词:仿生,机器人,探测
1.引言:
随着科技的不断发展,机器人的发展也逐渐快速起来,各种各样的机器人都在不断地涌现,分门别类的机器人给人们的生活带来意想不到的变化。蛇形机器人是一种能够模仿生物蛇运动的新型仿生机器人。由于它能像生物一样实现“无肢运动”,因而被国际机器人业界称为“最富于现实感的机器人"。威科技工业研究院(SINTEF Research nstitute)已经设计出一种用于火星表面探测的蛇形机器人。而美国的蛇形机器人研究则代表了当今世界的先进水平。2000年10月,美国航空航天局在加利福尼亚装备研制中心展示了一种用于外太空探险的蛇形机器人,它能在一些复杂地形行走时如履平地,运动十分灵活,并具有探测、侦探等多种功能。设计和研究蛇形机器人的结构和运动,是从仿生学的角度出发研制有利于人类社会的机器人。当代机器人的研究领域己经从结构环境下的定点作业向非结构环境下的自主作业发展。机器人被急切需要应用到环境复杂、高度危险和人类无法进入的场合完成作业。除了传统的车型设计方法外,机器人学者把目光转向了生物界,力求从具有各种运动特征的动植物上获得启发,设计新的仿生机器人。蛇形机器人就是在这种条件下孕育而生的。蛇的各种独特的运动特性赋予蛇形机器人以多种功能。蛇形机器人不但能够适应各种复杂地形,能够平均分配自己的体重,还具有自封闭的结构等特点使其吸引了国内外众多机器人学研究人员展开了对蛇形机器人的研究。
2.系统的总体设计:
项目设计一款具备多地形全方位探测功能的蛇形机器人,它可以代替人进入狭窄的空间执行探测任务;它也具有在废墟中救援的能力。
(1)该机器人由圆柱形模块组成,首端为探测模块,负责提供前方的信息,安装了可转动的高清摄像头以及音频采集设备,可以在最前端更快地收到相关信息。为了适应不同的环境,在机器人两侧安装履带来应对不平缓的地形。底部装有翘板,必要时可将机器人底盘提高攀越一定高度的障碍。
履带采取柔性锯齿状橡胶材料,以此来提升摩擦力以更好地越过障碍。
(2)机身为可连接的多功能辅助单元机器人,最多可以连接4个辅助机器人。
辅助机器人分别有以下功能:
①为前方提供照明并提供动力。
②为了弥补只有前端可以接收到图像信息的不足,计划在中间的模块两侧加装两个微型摄像头以弥补周围环境信息的缺失,可以以此获得更大的视野,为操控者提供更多的信息来判断机器人所处的环境。
③提供定位,在发现被困人员时辅助单元机器人会进行位置记录。如果是在地震之后或者有其他因素影响的情况下,辅助单元机器人它可以留下当做信号发生源。根据环境以及所需要达成的目的不同来附加不同的单元模块,这种结构使它具备灵活的运动能力以及更多不同的需求,可以应对许多独特的环境。
(3)设计外壳将采取金属材料,这样不但可以保护机身,也可以增加重心
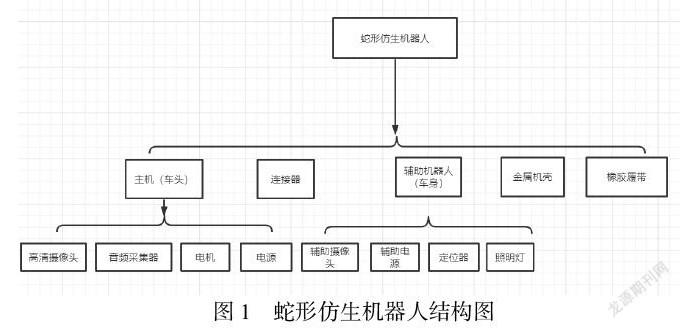
(4)可遠程遥控控制,可利用不同的程序实现它不同的运动模式为其提供更大的自由度满足大部分的需求,操作人员也可以自己通过终端设备单独控制某一个部分的运动以及关节的延伸方式,做到随自己心意而动。蛇形仿生机器人的结构图如图1所示:
3.设计与实现
3.1环境感知模块
1)数据传输模块
该无线传输模块工作在1060~1380MHz频段,可进行4个通道的音/视频无线收发。它的功耗余量大,耗电电流小,体积小,传输距离远,更能适合各种复杂的实际环境。在一般的阻挡情况下可传输400米左右。
2)音频采集
通过麦克风可以获取现场的声音,进而判断遇难者的存在,并通过扩音器与其进行双向语音交流,即人机接口可以接收来自前端多传感器单元发送过来的音频数据进行播放,同时人机接口也能把搜救人员的音频数据发送到前端多传感器单元进行语音对话。
3)视频采集
其主要用于人员搜索和机器人导航控制。选用高灵敏度红外夜视微型摄像头,其采用红外发射灯。即使在环境光线全黑情况下,仍可完成视频监控,夜视距离5m。
3.2通信方式:
1)有线通信
机器人携带数据线进行运动,将采集到的生命信息和环境信息—并通过数据线传送出去,实时、快捷,无干扰,还可进行视频监控,同时也可为机器人提供能源等。但是,携带数据线运动给机器人带来一定的影响,搜救现场的环境复杂很可能压住或损坏数据线。因此,有线通信方案适合环境相对简单的现场。
2)自身记录信息后返回
机器人自身能够记录生命信息和环境信息,在能源供应允许的时间内按原搜救路线或者其他搜救路线返回,在搜救过程中不携带数据线,运动灵活、方便。但是,受能源以及救援时间的限制,此种方案可用于生命搜救分体的第二阶段。
3)Zigbee 无线通信+基站
采用 Zigbee 无线通信方案的优点是低功耗,成本低、数据信息安全可靠等。采用 Zigbee 无线通信技术,需要多个无线数传模块共同搭建一个无线数传网络平台,一般搭建数传平台有两种方案。
方案一:针对事故率高的场所,如煤矿等,可以在合理的位置事先配置无线数据模块,当发生灾难时可以迅速应用。
方案二:以机器人本身作为无线数据模块组建立无线数传网络平台,机器人在实际运动时一方面进行信息探测,一方面进行数据信息的传输。多机器人之间的协同可以实现搜救信息的共享,以提高救援效率,也可以将探测的重要信息传送给信息中心或救援人员。
3.4控制模块
控制核心为ST(意法半导体)推出的基于ARM® Cortex™-M4的内核的STM32F4系列高性能微控制器,其采用了90 纳米的NVM 工艺和ART(自适应实时存储器加速器,Adaptive Real-Time MemoryAccelerator™)。ART技术使得程序零等待执行,提升了程序执行的效率,将Cortext-M4的性能发挥到了极致,使得STM32F4系列可达到210DMIPS@168MHz。自适应实时加速器能够完全释放Cortex-M4内核的性能;当CPU 工作于所有允许的频率(≤168MHz)时,在闪存中运行的程序,可以达到相当于零等待周期的性能。STM32F4系列微控制器集成了单周期DSP指令和FPU(floating point unit,浮点单元),提升了计算能力,可以进行一些复杂的计算和控制。
4.能源供给方式
蛇形仿生机器人的能源供给方式有两种选择方案:有线方式和无线方式。
有线供能方式能够保证充分的能量供给,但是导线本身的压降以及导线与环境的摩擦或者是受到障碍物的影响等制约着机器人运动的灵活性及其对环境的适应能力。采用蓄电池这种无线方式可以在一定程度上提高灵活性以及适应能力。但是蓄电池的质量和体积较大,而且续航能力有限,选择高能蓄电池来作为机器人的主要能源供给或者作为实际运行时的备用电源。
无线能量传输是指能量从能量源以无线的方式传输到电负载的一个过程。当前人们研究无线能量传输技术主要有;
①辐射技术,通过某种独特的接收器来接收空气中的能量,并将其转换成电能储存在电池中,此种方法所能获得的能量十分有限的。
②磁场共振技术,利用共振原理来传递能量。当两个物体在共振时,实现能量的无线传输,但是在能量传输过程中很容易受到周围电磁场的干扰,因此获得的能量不够稳定。
③利用自然环境中的热能,光能等,将其转换成所需的能量。
④电感耦合技术。通过相对直接的接触来进行能量传输的,此种方式虽然能够稳定地获得相对较大的能量,但是传输距离很短。
综合考虑,采取有线供能与高能蓄电池供能相结合的方式较为理想,当供电线路在影响机器人运动时,机器人可以分离供电线后依靠蓄电池供能而自行运动。在利用线路供能时,可同时将现场的情况传回监控中,方便救援人员更好地掌握现场的情况。
5.结论
本文设计了蛇形仿生机器人,能实现辅助探测复杂地形的功能,具备广泛适用性等特点,运行正常,仍需改进,下一步将融合更多模块,并且将会是可以随意组装的模块化机器人,将更多的部件融会贯通,添加进来。
参考文献
[1]庞博.模块化蛇形机器人的设计与研究[D].河北工程大学,2014,(03)
[2]谢哲东,张添一.蛇形机器人的研究与发展[J].农业与技术,2017,(19)
[3]焦海坤,张添一,谢哲东.一种拉线式蛇形机器人设计与研究[J].中国农机化学报,2018,(08)
基金项目:国家级大学生创新创业训练计划项目“蛇形仿生机器人”(202110066008)
作者簡介:代亚坤(2001-),男,本科生,自动化专业。