中低山区直升机重磁缓起伏测量方法研究
2021-10-23耿圣博闫红雨安战锋关海静王志博金久强徐明王鑫李冰郭琦
耿圣博,闫红雨,安战锋,关海静,王志博,金久强,徐明,王鑫,李冰,郭琦
(1.中国自然资源航空物探遥感中心,北京 100083; 2.中国邮政储蓄银行股份有限公司,北京 100166)
0 引言
直升机航空物探测量因其飞行方式灵活,特别适合小区域大比例尺高精度测量[1]的特点,已经成为地质调查及地质找矿的重要手段。近年来逐渐兴起以直升机为航空物探测量平台进行的航磁、航重、重磁[2-3]、磁放、磁电等多种测量方法。从已完成的直升机测量项目来看,中国自然资源航空物探遥感中心采用缓起伏方式在地势相对平坦的平原地区开展重磁测量[4];采用沿地形起伏的方式在地势相对平坦的盆地地区开展重磁测量;采用沿地形起伏方式在云贵高原开展航磁测量[5];北秦岭中低山区开展了磁放测量;大冶铁矿开展航磁测量[6]。中国地质大学(北京)的许苏鹏在青藏高原中开展航磁测量[7]。中国地质科学院地球物理地球化学勘察研究院所承担的项目“南盘江—右江地区航空物探(磁、放)调查”在山地丘陵地区开展了磁放综合测量;“山东省淄博市金岭矿集区富铁矿资源深部及外围调查评价高精度航磁工程”在丘陵平原地区开展了航磁测量。核工业航测遥感中心所承担的项目“辽宁省丹东地区青城子矿集矿区和五龙矿集区航空电磁探测”在山地丘陵地区开展了磁电放测量。受制于设备要求,对于成矿条件比较有利的山区,以往主要以固定翼航磁测量为主,或采用固定翼以平飞方式开展重磁测量,或采用直升机航磁、磁放测量,鲜有中低山区直升机重磁测量。固定翼有测量效率高,有效载荷大,飞行姿态稳定等特点[8],但是在地形切割剧烈的中低山区测区,虽可开展沿地形起伏飞行的航磁测量,但由于颠簸剧烈,并不适合搭载航重设备,不适用高精度航空物探重磁测量。因此开发一套应用于中低山区的具有较高测量精度的直升机重磁测量方法,对中低山区的地质找矿及重磁测量方法更大范围的应用意义重大。北秦岭华阳川地区属于典型的中低山区[9],近年来硬岩型铀矿找矿取得重大突破,现需要对铀矿成矿地质背景、控矿因素、成矿规律等进行系统研究。由于自然地理、气候条件的限制和历史特定因素,测区内覆盖的航磁资料多为20世纪50~60年代的低精度航磁调查所得,且重力测量工作程度总体很低,以1∶50万重力资料为主,1∶20万重力测量工作区内无覆盖,直到2016年才在该区局地开展了1∶1万高精度磁放调查。因此计划在该区开展航空物探重磁调查工作,借以研究推广适用于中低山地区的航空重磁测量方法。北秦岭构造带位于秦岭商丹断裂带与栾川断裂带之间,主要岩石地层单元自北而南依次为宽坪岩群、二郎坪群、秦岭岩群和丹凤混杂岩,它们之间均以断裂带为界,沿NWW向平行展布,构成北秦岭构造带的主体构造线(图1)。此外,有少量超镁铁质岩和花岗岩分布[10-11]。区域岩浆活动极为发育,侵入岩、火山岩及脉岩均有产出,工作区侵入岩属于秦岭东西向构造带的组成部分,具有EW向成带分布、多次侵入的活动特点[12]。
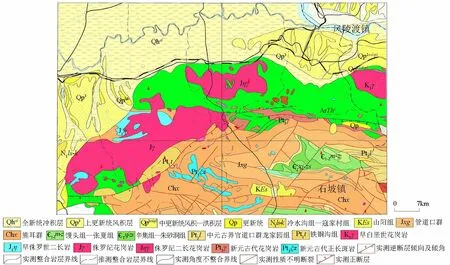
图1 测区地质Fig.1 Geological map of survey area
项目测区范围为50 km×50 km,区内山脉河流发达,测区及周边地区均为中低山区。山脉大致成EW走向,区内最高峰海拔2 645 m,最低海拔660 m,山高林密,河谷纵横,高差2 000 m,飞行难度较大。
本文对如何将直升机重磁测量方法应用于中低山地区进行了研究,改装了适用于中低山地区重磁测量的飞机,设计了三维测网,提出了沿地形缓起伏飞行的方法。使用该方法圆满地完成了北秦岭华阳川地区重磁测量任务,取得了重力场异常形态特征明显的重力数据,同时兼顾了航磁测量,证实了该方法的有效性。
1 飞机选型及改装
对比表1中各类飞机的性能可知,直升机因其灵活的飞行方式以及相对宽松的起降条件,在小测区的中低山区进行作业,具有较大优势。综合飞机性能及项目特点,项目组选取直升机作为航空测量平台。

表1 主要航空物探平台机型参数
目前采用最广泛的机型是欧洲直升机航空公司生产的AS350-B3型直升机。该机型自重1 241 kg,可用载重1 009 kg,最大起飞重量(海平面)2 250 kg。单飞行员操作时,空载瞬时极限爬升率10 m/s,极限工作高度7 800 m。最大供电电流28V150A,客舱高度1.3 m。该机型曾经完成过航磁、航重、重磁、磁放多项任务,性能优异,能够满足本项目航空重磁综合测量的飞行要求。
飞机改装应考虑飞机磁干扰场分布,飞机配重,外挂设备对飞机空气动力学影响,设备装卸,设备操作等几个方面。
如图2所示,在机头方向9 m处,干扰场的影响非常弱,故定制长度9 m的无磁探竿,将探头设置于探竿前端,并将此探竿固定在机腹位置。为防如此长的探竿在飞行时震动过大,在机腹位置设置3个固定点。
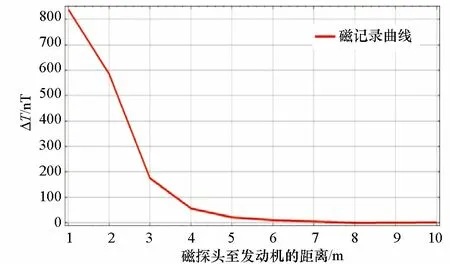
图2 探头远离飞机和螺旋桨时磁干扰的变化Fig.2 Variation of magnetic interference field
设备安装时必须考虑配重问题。设备质量如表2。项目组选定飞机在机腹左侧有3个外挂点,可用来固定探杆,因此,较轻的探竿和机柜等组成的航磁系统放置在飞机左侧,较重的航重系统放置在飞机右侧。同时,因飞机尾桨在飞机右侧,考虑到操作安全问题,操作窗口设置在飞机左侧,避免尾桨误伤工作人员。安装示意如图3所示。
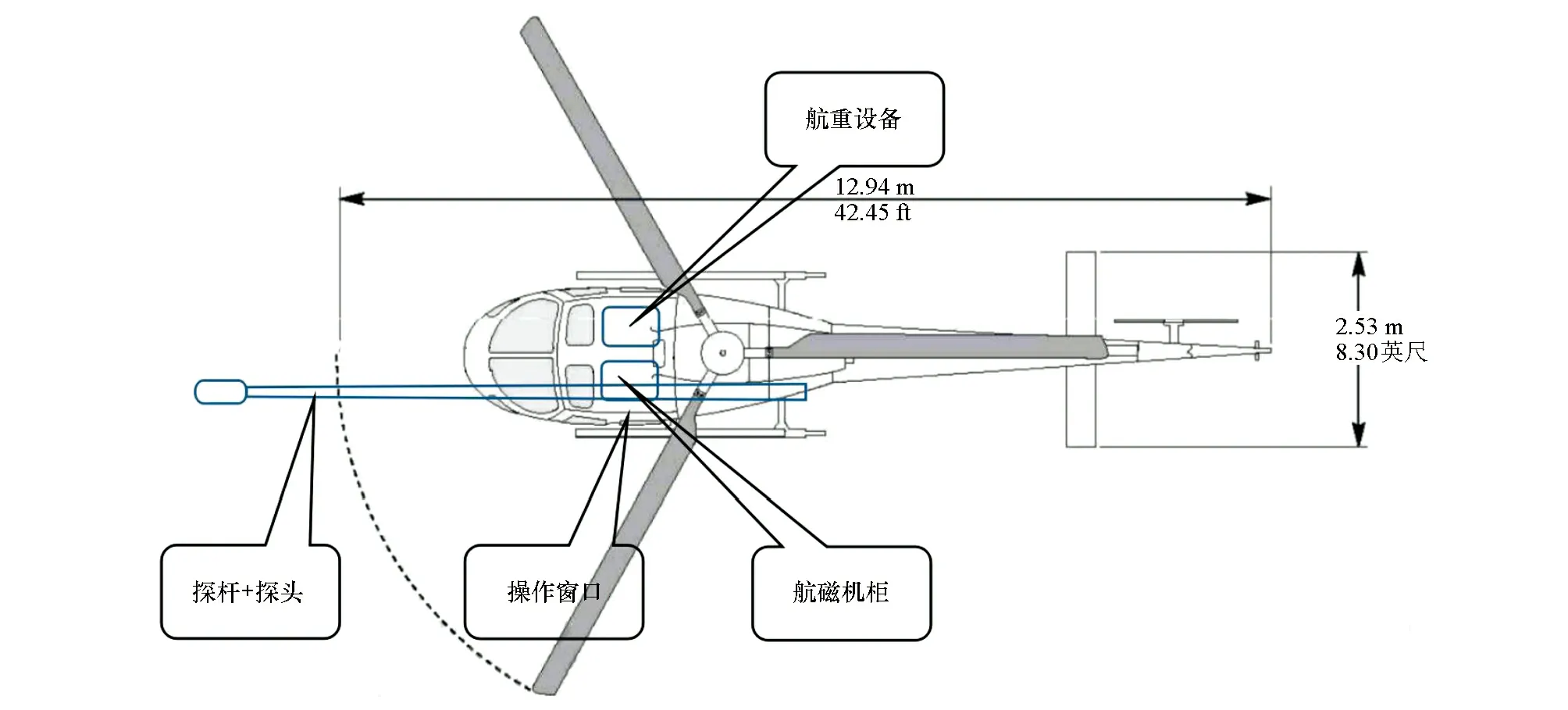
图3 航空重磁测量系统设备安装示意Fig.3 Aero gravity and magnetic measuring system installation diagram
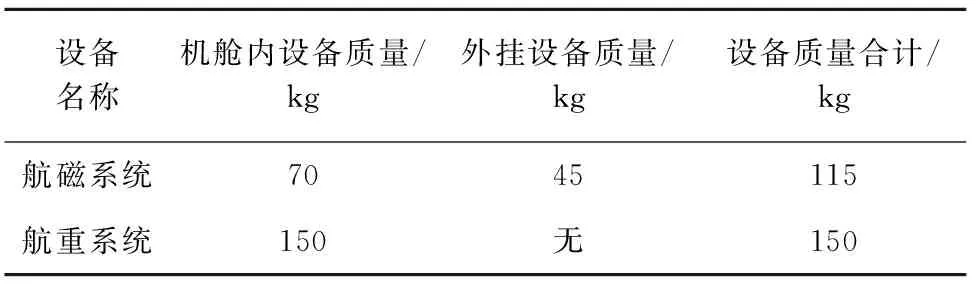
表2 航空重磁测量系统设备质量
飞机改装实物如图4所示,根据规范要求[13],对测量设备进行静态和动态测试。静态测试对于航磁设备主要观测航磁设备稳定性及定位精度,根据现场条件,测试时间选在凌晨0:00~5:00间进行,以减少人文干扰;航重设备静态测试则是模拟飞行状态,对重力设备进行静态精度及定位精度测试。结果如表3,满足规范要求。

图4 航空重磁测量系统Fig.4 Aero gravity and magnetic measurement system

表3 重磁测量系统静态测试结果
动态测试对于航磁系统主要进行补偿测试,补偿方式为在测区内10 km×10 km地磁平稳区域内,在海拔3 000 m高度按规定动作做闭环飞行;航重系统主要考察仪器动态稳定性和重复性,选取一条长度约48 km的SN走向测线,反复飞行5次。测试结果如表4,满足规范要求。
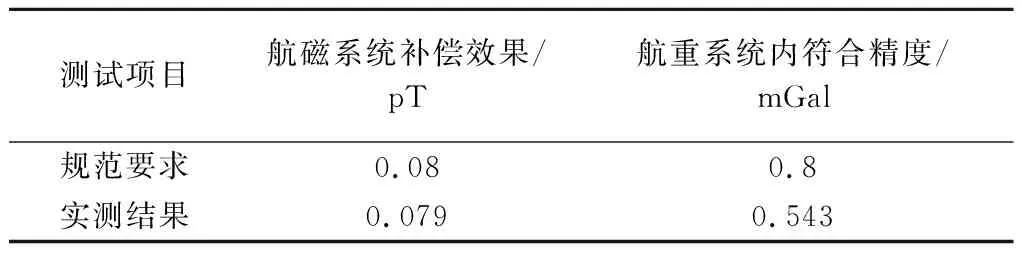
表4 重磁测量系统动态测试结果
2 测网设计
在以往测量中,航磁测量一般采取沿地形起伏飞行,而航重测量一般采取平飞方式[14-15],测网均为一张平面网。本项目是在中低山区进行重磁测量,按以往航磁飞行方式沿地形起伏飞行时,起伏较大,重力测量设备承受的加速度太大,设备自保护会导致设备死机;若增加离地高度,采取航重测量方式,可以减小起伏,但会导致航磁测量效果不好。此外,飞机沿地形起伏飞行时,对于测线切割线交点,两线是否在同一高度相交,完全依靠飞行员个人能力。实际飞行效果是大多数测线、切割线因高度不一致未能相交,两者间存在较大高差。为兼顾两种测量方式,降低测线切割线交点高度差,本次测量飞行方式采用沿地形且起伏坡度小于3°的缓起伏测量方法[16-18]。飞机沿设计好的测线飞行,除了控制左右偏航外,还需控制上下偏航。使航迹保持在设计测线周向50 m以内,测线切割线交叉点高度差控制在±40 m以内,过山头高度为真高100 m。为此,制定了三维测网。
在传统的航空物探测量中,测网是测线切割线组成的平面网,测线和切割线并没有设定海拔高度和坡度信息,只设定长度和航线信息。飞机飞行时按测线保持航向和偏航距,虽然导航系统除了提供航向,水平方向偏航距等信息,也提供高度信息,但是测网并不设定高度信息,如图5。最下标尺红三角表示当前飞机位置与测线重合。
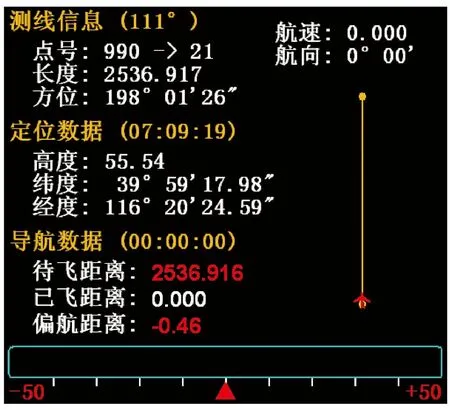
图5 平面测网导航Fig.5 2 D plane survey grid navigation diagram
本项目采用的三维测网,除了设定了每条测线的航向和长度外信息,还要求设定测线的海拔高度和坡度信息,如图6所示。十字中心的圆点表示飞机位置,飞机在飞行时水平方向和垂直方向与测线的偏离均能实时反映出来。
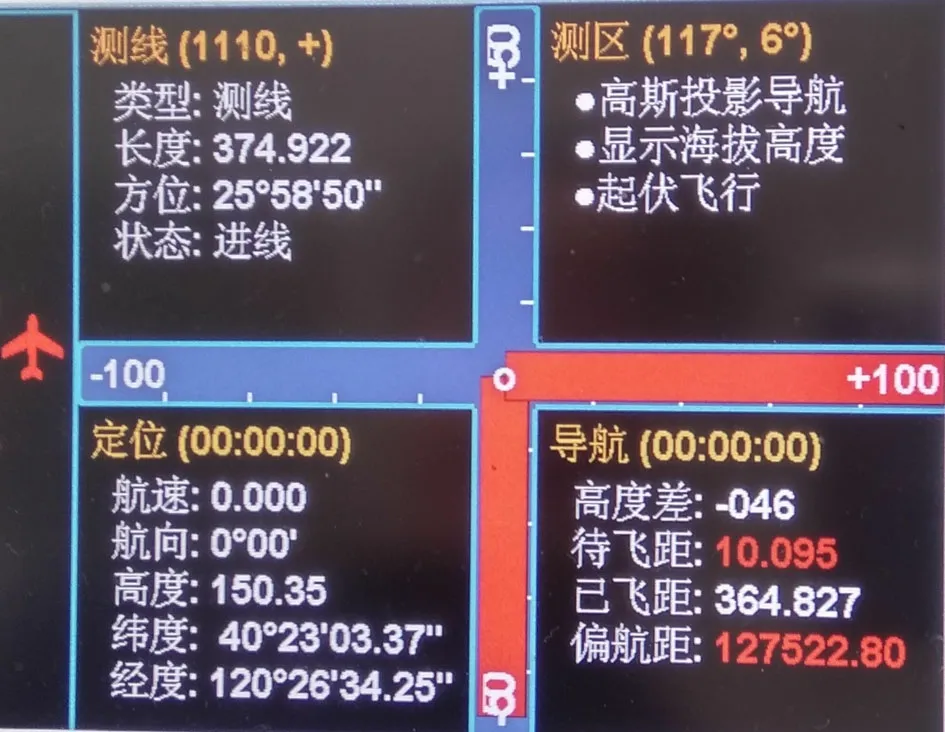
图6 三维测网导航Fig.6 3 D plane survey grid navigation diagram
以数字地形高程数据(DEM)为依据,编制三维测网。DEM数据(SRTM数据)是美国太空总署(NASA)和国防部国家测绘局(NIMA)以及德国与意大利航天机构共同合作完成联合测量,SRTM地形数据按精度可以分为SRTM1和SRTM3,分别对应的分辨率精度为30 m和90 m数据,目前公开数据为90 m分辨率的数据。因此,利用DEM数据可以获得一张最小方格为90 m×90 m的地形数据网。
设计三维测线需首先确定测网中各条测线海拔最高的点,从最高点向测线两端设计三维测线。如图7中a点为某条测线海拔最高点上空100 m处,从a点沿3°坡度向两侧延伸,每隔90 m会与一条DEM数据相交。如图所示,假设紫色为某条测线地形,a点沿3°坡度向右延伸至测线终点e是理想状态。当向左以3°坡度延伸时,起初按虚线ab延伸,虽然也满足坡度小于3°,但当由b延伸至c时,坡度超标。因此只能由a点沿小于3°的坡度直接延伸至c点,再由c点沿3°坡度继续向测线终点f点延伸。在地形变化剧烈的地区, f点高度可能远远高于d点。最终三维测线形态为f—c—a—e。这样的测线,不但设定了测线的航向和长度,还规定了测线的海拔高度以及坡度。故所有测线和切割线组成的测网称为三维测网。
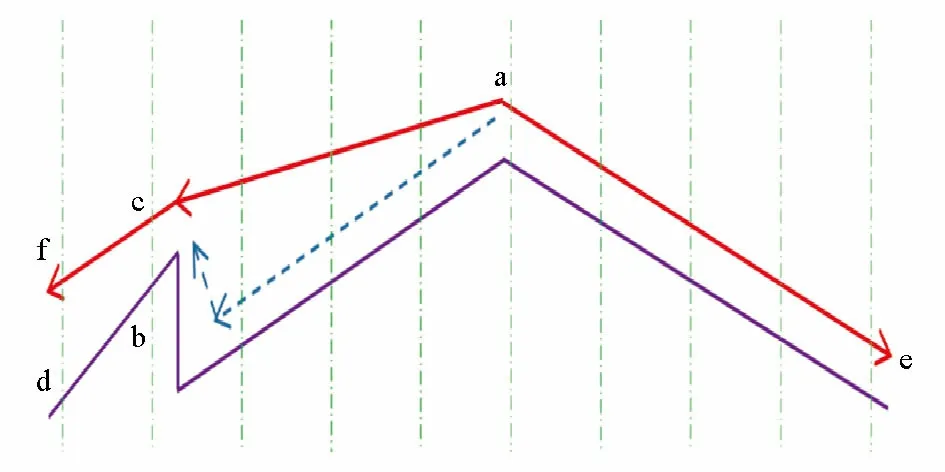
图7 三维测网设计示意(“——” 为DEM数据)Fig.7 3D plane survey grid diagram(“——” is DEM data)
若是从测线端点d开始沿3°坡度向e点设计三维测线,假设dc段坡段远远大于3°,设计满足要求的测线需要首先确定f点的高度,如此会增加设计难度,增大工作量。图8是一条设计好的三维测线,可以发现测线端点和地形之间存在较大高度差。
此外,为了便于飞行,在坡度不变的地方10 km设置一个控制点;在坡度发生变化的地方,根据实际地形适当设置控制点。从飞行安全的角度讲,整条测线控制点不宜太多。飞行员在操作飞机时只需对准控制点飞行即可。当然,实际飞行时需要图6所示的更加先进的三维导航系统,该系统在上下左右4个方向上控制飞机位置,使飞机总能保持在三维测线周向50 m以内。这样可以更好地控制测线质量。
切割线设置方法相同。需要注意的切割线与测线必须相交,从而形成一个完整的网。实际三维测线如图8所示。图9是实际飞行航迹曲面与地形对比图,可以发现三维航迹沿地形起伏,很好的覆盖在地形曲面之上。
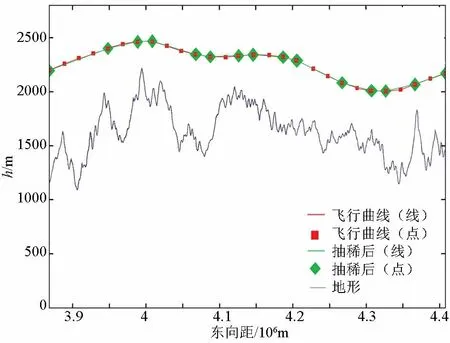
图8 设计测线效果Fig.8 Design survey line diagram
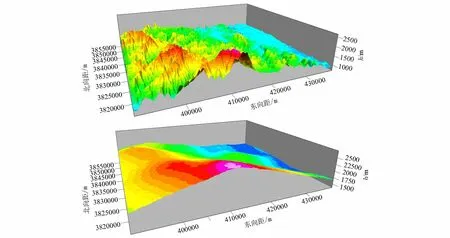
图9 地形(上)与飞行航迹曲面(下)Fig.9 Terrain(up)and flight path(down)
3 测量效果
通过对比实际地形图和飞行航迹,可以发现实际航迹形成一个曲面很好地覆盖在测区上。
飞机按三维测网在中低山区缓起伏飞行,偏航是否满足设计要求,直接影响测量效果。此处的偏航,指的是上下左右4个方向的偏航。通过数据统计,测区内航迹水平偏航全部合格;航迹与设计测线的飞行高度差(即上下偏航)按测点统计,平均飞行高度差为4.935m,小于20 m的占总测线数的 99.22%,小于40m的占99.94%,统计结果见图10。
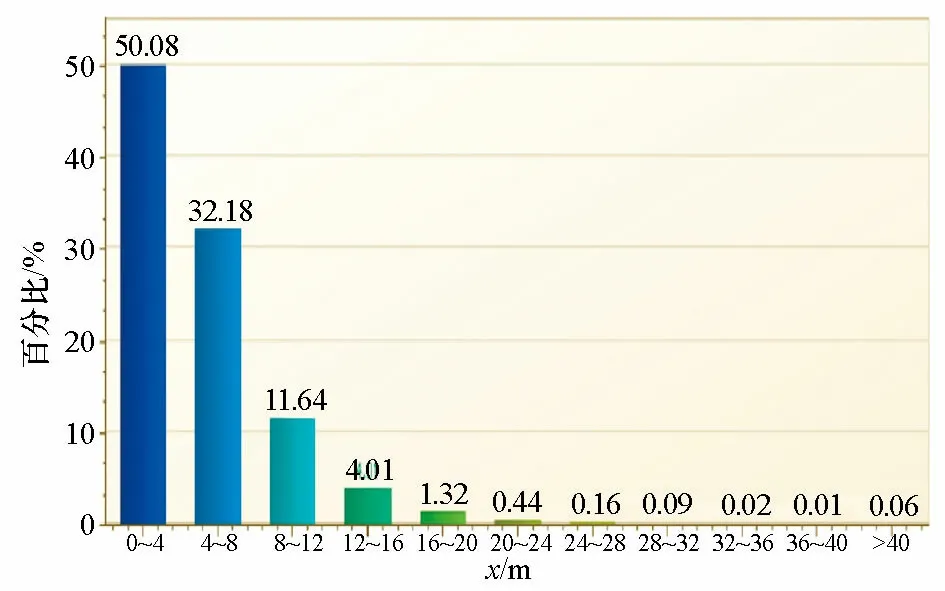
图10 航迹与设计测线高度差统计Fig.10 Height difference statistics of flight path and design survey line
全区缓起伏测线切割线共516个交叉点,交叉点高度差在28 m以内占99.62%。通过使用三维导航系统,绝大部分交叉点高度差很好的控制在30m以内,统计结果见图11。交叉点高度差越小,测线切割线场值差越小,对后期调平、数据处理、成图具有重要意义。
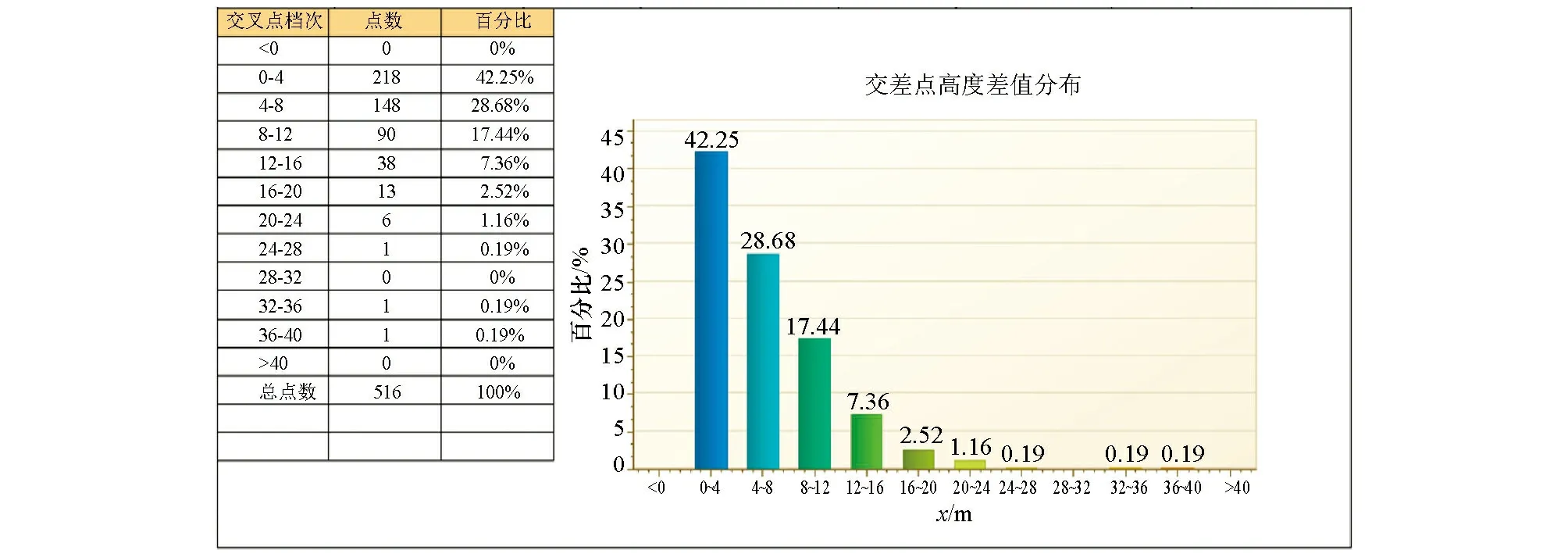
图11 测线切割线交叉点高度差统计Fig.11 The height difference statistics between the intersection points of the survey line and the cross line
为验证缓起伏飞行效果,在重点区域安排海拔2 600 m平飞测线与缓起伏测线进行对比。图12为同一地区平飞测线与缓起伏测线航磁ΔT阴影图,通过对比发现,该区缓起伏飞行的磁场面貌特征比平飞的磁场面貌更加丰富,中北部地区叠加的圆状、椭圆状局部异常形态特征更加明显,异常细节比较多;中部NWW向条带状异常带,在缓起伏飞行航磁异常场中更加清晰。由此说明,缓起伏飞行航磁异常图可对该区的矿致异常特征的研究及航磁异常找矿研究提供详细的航磁基础资料。
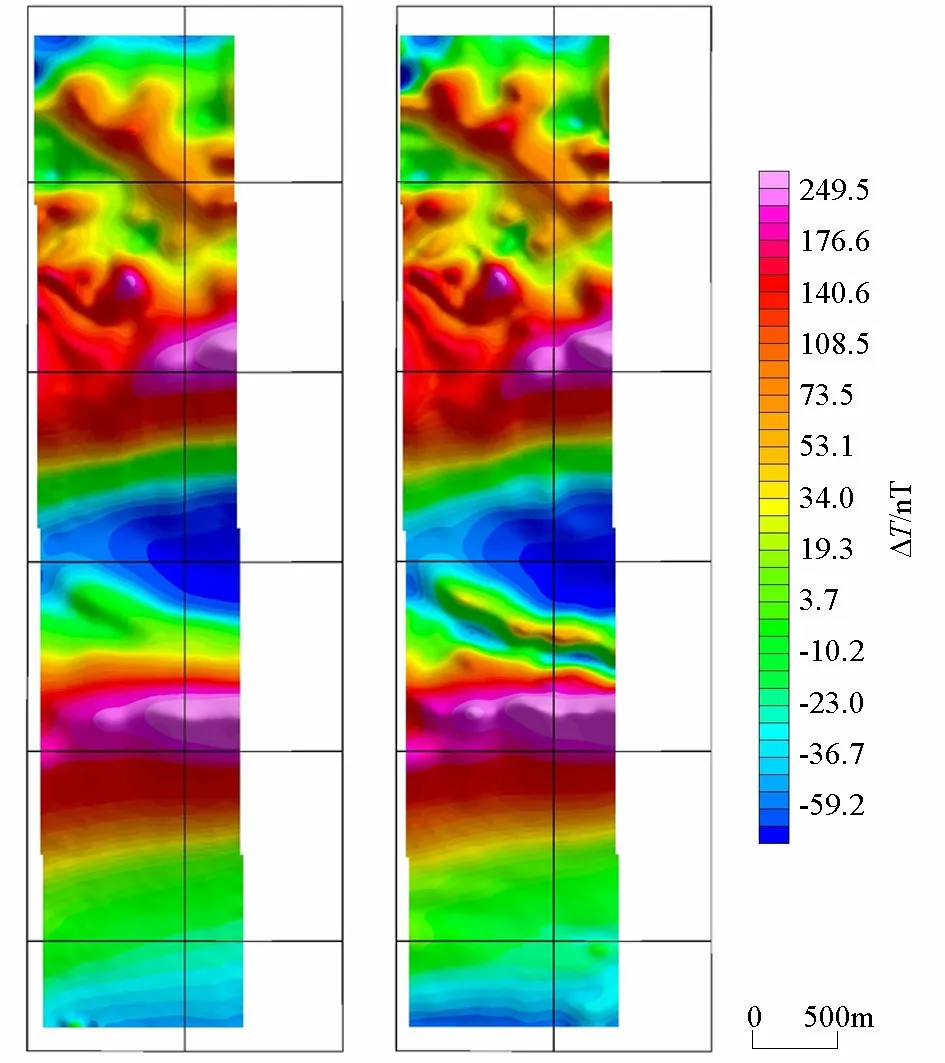
图12 平飞航磁ΔT阴影(左)与缓起伏飞行航磁ΔT阴影(右)Fig.12 Horizontal flight aero magnetic ΔT shadow diagram(left) and slow rise and fall flight aero magnetic ΔT shadow diagram (rigth)
图13为同一地区平飞测线与缓起伏测线航空空间重力阴影图。通过对比航空空间重力异常场发现,该区缓起伏飞行的重力场面貌特征比平飞的重力场异常形态特征更加明显,叠加的局部异常边界更加清晰,缓起伏飞行航空重力异常图,可为研究区域地质构造、推断断裂带及岩性地质体、编制航空物探推断岩性构造图等提供更重要的航空重力基础图件。
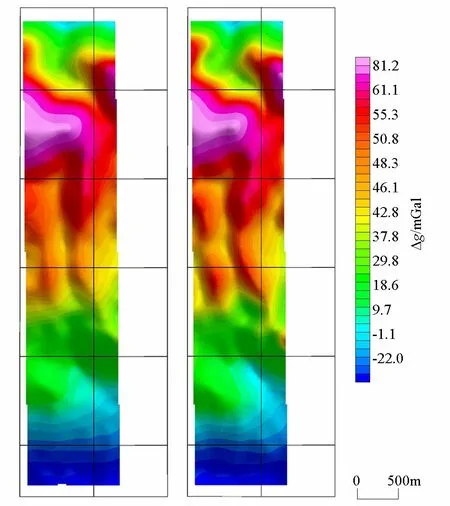
图13 平飞航空空间重力阴影(左)与缓起伏飞行航空空间重力阴影(右)Fig.13 Horizontal flight aero space gravity shadow diagram (left) and slow rise and fall flight aero space gravity shadow diagram (rigth)
4 结论
使用AS350-B3为航空重磁测量平台,集成了可用于中低山区的直升机航空重磁测量系统。通过设计全新的三维测网,在中低山地区沿地形做缓起伏重磁测量,可以同时兼顾重、磁两种测量,提高了测量效率。在缓起伏全覆盖的情况下,选取测区内重点成矿区域采用传统平飞方式二次测量。通过对比不同工作方式下的测量效果,验证了飞机、仪器设备在中低山区,在缓起伏模式下可正常工作。而缓起伏测量因为更贴近地面,取得的资料质量佳,细节丰富,可信度高,对后期数据处理,地质成图效果更好。同时,本方法的顺利实施为推广中低山区缓起伏测量积累了宝贵经验。
