基于图像识别的电梯限速器校验方法*
2021-10-23冯双昌
冯双昌 陈 杰
上海市特种设备监督检验技术研究院 上海 200062
0 引言
限速器作为电梯必备的安全保护装置,能够实时监测电梯实际运行速度。在电梯失速或者超速达到预定速度时,限速器动作,进而触发安全钳动作,将轿厢卡在导轨上,能够有效制停轿厢[1]。为确保限速器达到预定速度时能有效动作,电梯维护保养和检验中需对电梯限速器的动作速度进行校验。近年来,随着电梯安全监管力度的加强和检验内容的更新,对限速器的校验质量和技术要求也在提高。尤其是特种设备安全技术规范TSG T 7001—2009《电梯监督检验和定期检验规则——曳引与强制驱动电梯》(含第1 号、第2 号修改单)实施以来,限速器由受检电梯的维护保养单位按规定进行校验,对校验结果的准确性、校验方法的高效性、校验过程的可追溯性提出了更高要求。
1 传统校验方法的缺陷
传统的电梯限速器校验方法主要有2 种。一是将驱动装置、磁敏传感器、电气接收装置通过数据线连接到数据处理装置上,把磁铁放在限速器绳轮节圆处,采用磁敏传感器采集磁铁转速测定限速器的动作速度,将机械锁紧装置动作后采集的速度作为机械动作速度;二是将驱动装置、数据处理装置集成一起,将驱动装置的驱动速度作为限速器的运转速度,当机械锁紧装置动作时会产生一个制停冲击,以此作为机械动作速度。
然而,上述2 种校验方法在提取限速器的动作速度时都存在缺陷[2]。第1 种校验方法中,由于测速原理的局限性导致动作速度的校验值和实际值存在较大偏差,并且需要将限速器的节圆半径或周长输入到校验仪器中用于计算[3]。第2 种校验方法中,由于驱动装置和限速器存在相对滑动,简单地将驱动装置的驱动速度作为限速器的运转速度是不严谨的。另外,传统的校验方法至少需要3 名校验人员配合进行。由于安装限速器的空间一般比较狭小,尤其是在无机房电梯和小机房电梯中,存在顶层高度低、井道狭小、空间紧凑等不利因素,多名校验人员手持笨重的校验仪器同时进入如上述的空间进行限速器校验时存在很大的安全隐患[4]。并且,传统的校验方法只能记录最终结果,无法记录校验全过程,过程无法追溯。
2 新型校验方法
新型校验方法利用工业相机拍摄限速器校验的全过程,基于图像识别技术自动识别限速器节圆直径、运转时间、运转速度,进而获得限速器的电气动作速度和机械动作速度,并自动判断校验结果是否符合规定。
图1 所示为常见限速器实物图,图2 为限速器简图。驱动装置提供驱动力使限速器以A 为圆心作加速转动。工业相机光轴与限速器中心轴尽量在同一条直线上。工业相机通过实时监测特征1的运动轨迹来计算限速器的运转速度,生成一条速度曲线,直至机械锁紧装置被触发,随后限速器运转速度为零。当限速器运转速度达到一定值时,电气安全装置4 被触发,此时特征2 动作。捕捉特征2的动作状态,以特征2 动作时限速器的运转速度作为电气动作速度。当限速器机械锁紧装置被触发时,限速器运转速度达到最大值,即速度曲线的最高点,以此作为限速器机械动作速度。将所获得的电气动作速度、机械动作速度和标准中规定值进行比较即可判断该限速器的动作速度是否符合要求。

图1 常见限速器实物图
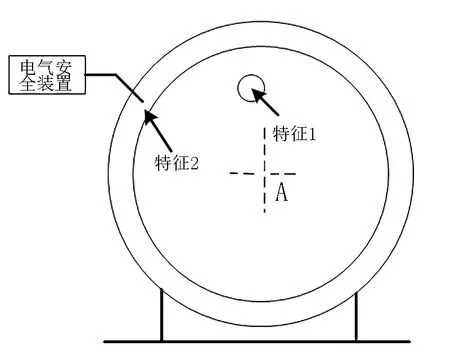
图2 限速器简图
3 新型校验装置
图3 为校验装置整体方案。校验装置主要由驱动装置、采集装置、控制处理装置组成。
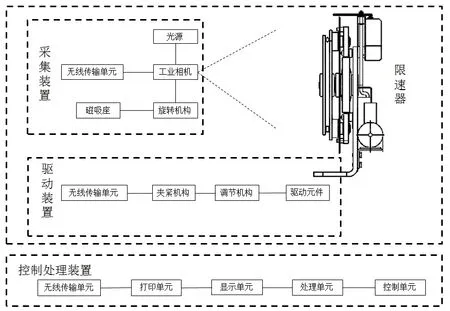
图3 校验装置整体方案
驱动装置主要由驱动机构、调节机构、夹紧元件、无线传输单元等组成。采用电动机作为驱动机构,驱动限速器轮盘转动。调节机构可调节电动机和限速器之间的压力,以此来提高驱动效果。当电动机和限速器轮盘之间的压力过大、接触过紧时,电动机在驱动轮盘转动的过程中会出现停滞现象。当电动机和限速器轮盘之间的压力过小、接触过松时,电动机在驱动限速器轮盘转动的过程中会出现打滑现象。因此,需要通过调节机构来调节电动机与限速器之间的压力,使二者之间的压力达到平衡状态,保证检测过程中的稳定性。电动机和调节机构通过夹紧元件固定于限速器旁的金属架上。
采集装置主要由工业相机、旋转机构、磁吸座、光源、无线传输单元组成。在限速器校验过程中,工业相机实时拍摄记录限速器运动的视频。旋转机构可调节工业相机的拍摄角度,以获得最佳的拍摄角度。工业相机和旋转机构通过磁吸座固定于限速器或附近的金属架上。光源用于提供工业相机所需的光照,以使工业相机能够拍摄较为清晰的视频。
控制处理装置主要由控制单元、处理单元、显示单元、打印单元、无线传输单元组成。限速器检测过程中,环境一般比较恶劣,检测空间较小,安全隐患大,故控制处理装置通过无线方式实现与驱动装置、采集装置的通讯。控制单元通过无线通讯方式控制电动机和工业相机的开启、关闭等动作;工业相机采集到的数据通过无线通讯方式传输至处理单元,并进行后续处理。显示单元和打印单元可对工业相机获取的数据进行存储和展示。可利用显示屏将校验视频进行播放或者利用打印机将校验报告打印出来。
4 图像识别算法
4.1 轮盘圆心识别
轮盘圆心的识别主要包括轮盘边缘提取、圆轮廓识别、圆筛选3 个过程。首先,进行轮盘边缘提取。对每帧原图像进行高斯模糊去除噪声,采用Sobel 算子对每帧原图像进行梯度过滤,得到限速器轮盘的边缘二值图。该图包含原图像中梯度较大的点,且包含轮盘边缘上的所有点。其次,进行圆轮廓识别。对边缘二值图进行Hough 变换,得到多个圆方程[5]。最后,进行圆筛选。工业相机所拍摄的图片中可能包含不止一处圆对象。限速器如果包含其他的小圆零件,也可能会被识别到。因此,需要进行圆筛选以剔除干扰信息,即仅保留Hough 变换中匹配点数最多的圆[6]。通过对应的圆方程,计算出轮盘圆心坐标(xo,yo)和半径r。图4 为识别到的圆和圆心,其中浅蓝色的线为圆,中间黄色的点为圆心。
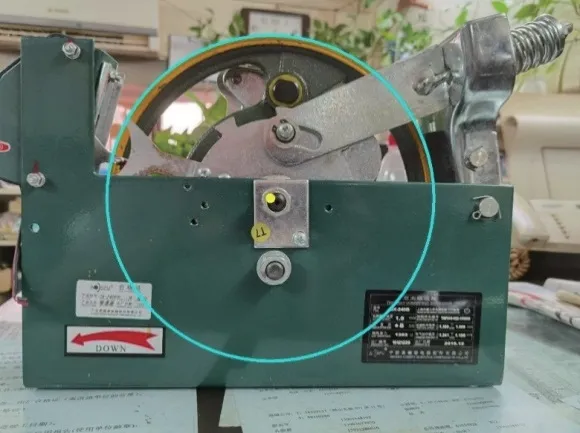
图4 识别到的圆和圆心
4.2 特征识别
特征识别需要识别3 处特征:特征1(见图2)、特征2(见图2)和机械锁紧装置制动臂(以下记为特征3)。
特征1 是手动标记的特征,该特征是吸附在靠近限速器边缘处的与周围背景不同颜色的磁铁[7]。可根据颜色过滤,获取特征1的位置坐标(x1,y1)。通过计算向量(x1-xo,y1-yo)的夹角,即可获得当前帧限速器轮盘所处的角度位置。因此,每一帧所对应的限速器轮盘的角速度可通过角度变化计算得到,进而求得限速器的瞬时线速度v。大多数限速器由于结构件的遮挡无法获得整个轮盘的图像,因此需要在轮盘圆周上等间距设置3 个不同颜色的磁铁,以保证任意时刻至少能识别到1个以上的磁铁标记。
特征2 是限速器的电气开关拨杆。由于要以电气开关拨杆动作时限速器的运转速度作为电气动作速度,故需要识别电气开关拨杆动作的一瞬间并记录当前时间te。考虑到电气开关拨杆较小不易标记,可通过对比相邻两帧轮盘边缘变化来识别电气开关拨杆是否动作。如图5 所示,电气开关拨杆动作前该拨杆挡住了部分轮盘边缘,电气开关拨杆动作后遮挡取消了。故可根据轮盘边缘颜色的变换来识别电气开关拨杆是否动作。
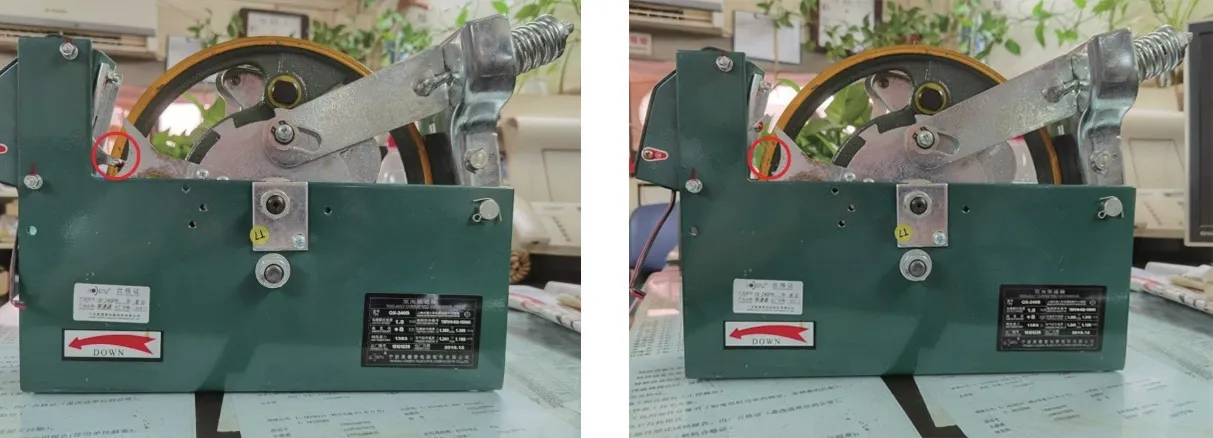
图5 电气开关拨杆动作前后实物对比结果
对限速器进行颜色滤波,提取轮盘边缘的颜色[8]。如图6 所示,电气开关拨杆动作前提取到的轮盘边缘颜色在图中箭头处有一个缺口,而电气开关拨杆动作后提取到的轮盘边缘颜色在同样的位置没有缺口。
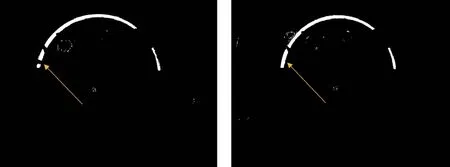
图6 电气开关拨杆动作前后图像对比结果
取一个很小的距离Δr,使以(xo,yo)为圆心、(γ-Δr)为半径的圆正好处于轮盘边缘涂色区中间。然后从最左端开始,按逆时针方向取1/4 圆弧上100 个点(即图7中所示圆弧)。

图7 按黄线所示圆弧逆时针方向取100 个点
对每个点周围19×19 个像素区域大小,统计颜色过滤二值图Bhls中的白点个数sum。然后以旋转角度为横坐标,以sum为纵坐标绘制折线图。图8 为电气拨杆动作前后折线图对比结果,可以看到电气开关拨杆动作前比电气开关拨杆动作后的折线图多1 个波谷,通过识别此波谷,就能判断电气开关拨杆是否发生动作。
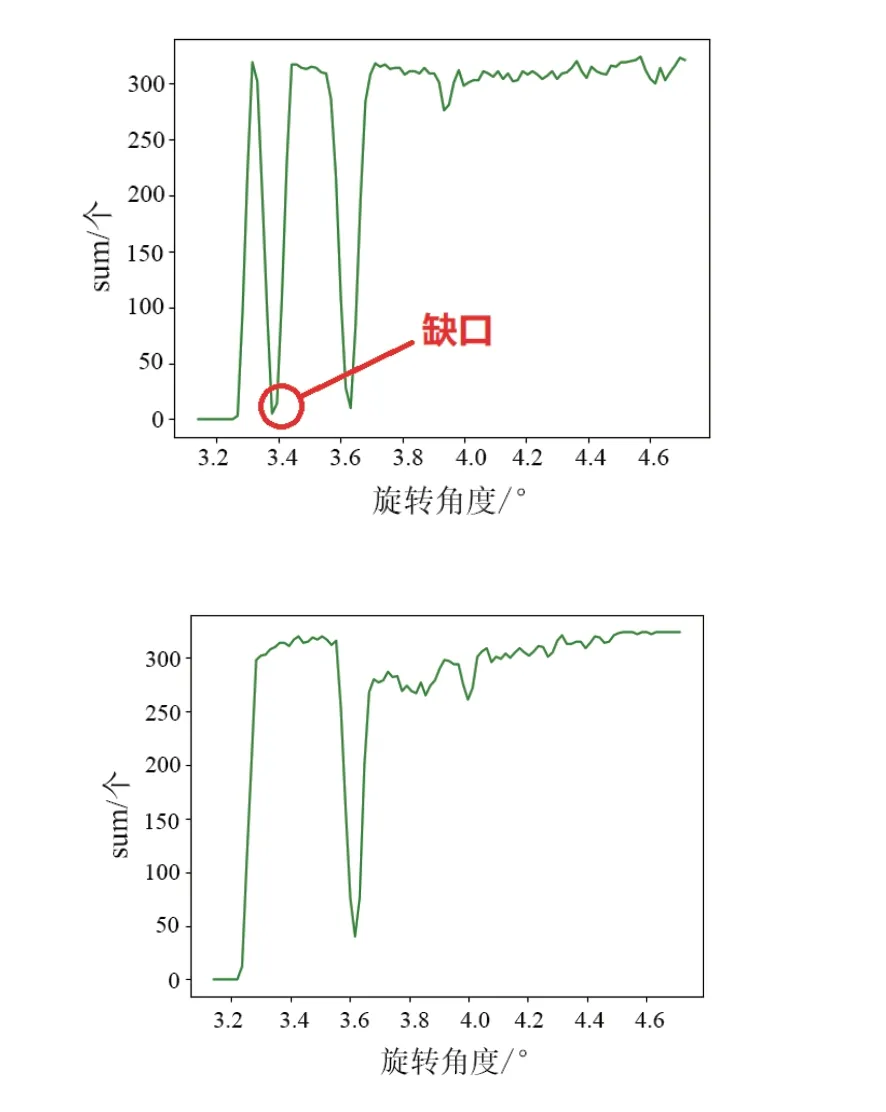
图8 电气拨杆动作前后折线图对比结果
可选限速器整个制动臂的任意1 个联动部位为特征3。不同的限速器由于结构不同所选的联动部位也不同。为使本方法更具有通用性,不以该联动部位的特征为特征3,而是通过在该部位表面吸附第4 块颜色不同的磁铁作为特征3。如图9 所示,为限速器特征3 位置选择示例。
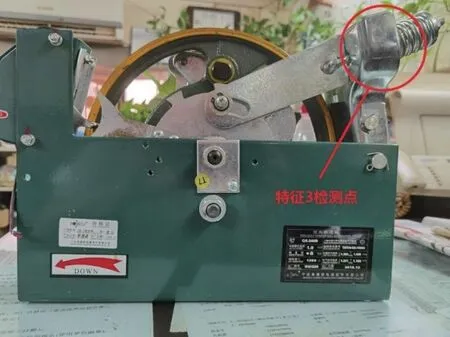
图9 限速器特征3 位置选择示例
4.3 速度计算
速度计算需要根据任意相邻两帧计算电梯限速器轮盘当前时刻的角速度,工业相机的帧率应保证限速器在最大转速时相邻帧之间转角不大于120°。因此,每帧图像都至少包含1~2 个标记,且两帧之间至少包含1 对颜色相同、位置不同的标记。
设限速器节圆半径为r、相机的帧率为f、前后相邻两帧夹角为θk,则当前电梯瞬时速度为
利用工业相机拍摄限速器校验的全过程,当识别到特征2 电气开关拨杆动作时所得速度即为限速器的电气动作速度v1;当识别到特征3 制动臂动作时所得速度即为限速器的机械动作速度v2。
5 校验结果判断
GB 7588—2003《电梯制造与安装安全规范》中规定,当限速器的电气动作速度和机械动作速度均满足以下要求时,限速器校验结论为合格;否则,校验结论为不合格。
电气动作速度的要求为
式中:v1为电气动作速度,v2为机械动作速度,v为电梯的额定速度。
机械动作速度的要求为
式中:当所述电梯使用瞬时式安全钳,且为不可脱落滚柱式时,v3=1 m/s;当所述电梯使用瞬时式安全钳且不为不可脱落滚柱式时,v3=0.8 m/s;当所述电梯使用渐进式安全钳且v≤1 m/s 时,v3=1.5 m/s;当所述电梯使用渐进式安全钳且v>1 m/s 时。v3=1.25v+0.25/v。
6 结语
采用工业相机拍摄的方式获取限速器校验的运动视频,并利用图像识别和处理技术对获取的视频进行分析处理,以获得限速器的电气动作速度和机械动作速度,从而实现限速器的自动化校验。该方法不仅可提高校验效率、准确性、安全性,还可确保整个校验过程具有可追溯性。
