基于ACS算法的MEMS加速度计现场标定方法
2021-10-17乔美英高翼飞李宛妮
乔美英,高翼飞,李宛妮,赵 岩
(河南理工大学电气工程与自动化学院,焦作 454000)
近年来随着微机电系统(Micro-Alectro-Mechanical System, MEMS)技术的快速发展,低成本、低功耗型传感器得到了广泛应用。MEMS 加速度计更是在无人机、组合导航和医疗保健[1]等多领域都发挥着重要的作用。由于低成本MEMS 加速度计易受生产工艺及安装的影响,导致实际测量值含有较大测量误差,无法满足精度要求。因此对MEMS 加速度计的标定是必要的。
目前加速度计的标定方法分为实验室标定法和现场标定法[2]。实验室标定法是通过高精密的测量仪器标定加速度计,标定结果较为准确,但需要较好的设施保障。现场标定法的引入解决了这一困难,通过获取现场数据,使用算法处理数据完成标定。
常用的算法有椭球拟合法、高斯牛顿法、列文伯格-马夸尔特(Levenberg-Marquardt, L-M)算法等,文献[3]使用改进的L-M 算法标定加速度计,但模型为线性模型且十分依赖初始信息。文献[4]使用高斯-牛顿法对水下多信号导航系统进行校准,将非线性问题近似成线性问题处理。近年来随着智能优化算法的不断研究,越来越多智能算法也应用到了现场标定问题中。目前主流的群体智能优化算法有:遗传算法(Genetic Algorithm, GA)、粒子群(Particle Swarm Optimization, PSO)算法、布谷鸟搜索(Cuckoo Search, CS)算法等。文献[5][6]分别使用GA 和PSO 算法对加速度计进行现场标定,但两种算法的标定结果并不理想,且容易陷入局部最优情况。文献[7]提出的CS 算法在处理非线性问题时,具有较强的全局搜索能力,但算法存在收敛速度较慢的问题。
针对上述问题,为快速、准确地对加速度计进行现场标定,本文引入改进的自适应CS 算法标定加速度计。其具体过程为:首先对加速度计测量误差进行分析,建立其误差模型。然后构建了标量约束目标函数,并通过自适应权重和自适应调节因子对CS 算法进行了自适应改进。最后采用改进后的自适应布谷鸟搜索(Adaptive Cuckoo Search, ACS)算法进行最优化求解,得到待标定的误差参数。实验结果表明,本文提出的方法能准确地标定加速度计,是一种有效的现场标定方法。
1 MEMS 加速度计误差模型
1.1 误差分析及模型建立
理想情况下三轴加速度计三个敏感轴是互相正交的,但由于生产安装等因素使三个敏感轴处于非正交位置。为标定这部分安装误差,指定加速度计上理想的正交坐标系为t 系,敏感轴实际构成的坐标系为s系。将加速度矢量a 从t 系投影到s 系,得到包含安装误差的输出模型如式(1)所示。由于非正交安装误差角均为小角,所以坐标系之间的转换矩阵可写为式(2)。

其中 as、at表示加速度在s 系和t 系的投影;K*为非正交安装误差矩阵;θxz、θxy、θyx、θyz、θzx、θzy为s 系与t 系z 之间的误差角,如图1 所示。
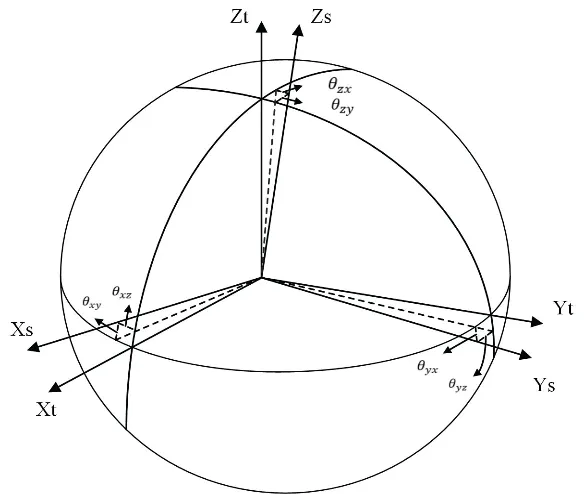
图1 非正交安装误差角Fig.1 Non-orthogonal installation error angle
对非正交安装误差矩阵K*进行QR 分解变换[8]如式(3)所示,将非正交安装误差矩阵分解为正交矩阵Q 和主对角线元素为1 的三角矩阵K。

其中正交矩阵Q 的含义是:将t 系和s 系的某一轴对准。假设通过初始方位对准能将s 系与t 系的x轴对准,非正交安装误差矩阵可简化为K ,如式(4)所示:

将比例因子误差和偏置误差考虑进模型,则加速度计误差模型变为:

其中比例因子误差矩阵 S =diag( kx, ky, kz),偏置误差向量B =[ bx, by, bz]T。由式(5)得:

1.2 标量约束目标函数
本文研究静基座条件下的标定。在静基座条件下,无论加速度计处于任何位置,所测加速度恒等于重力加速度。参考Hamid[9]等人设置的目标函数,本文从标定结果的方向性原则考虑,构造了新的标量约束目标函数。Hamid 使用的目标函数如式(7)所示:
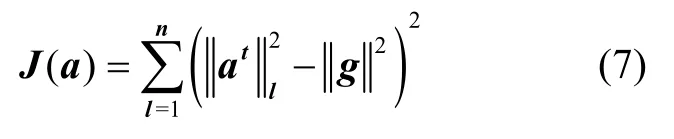
其中,n 为获取的数据个数,重力加速度g=[ gx, gy, gz]T(g 取9.8)。使用该模型标定加速度计会出现标定后加速度矢量虽然能分布在以重力矢量模为半径的球面上,但和重力矢量不重合。
究其原因:仅以矢量进行约束时,其针对各分量的标量约束较弱。因此,本文从方向性原则出发,对加速度矢量各分量的标量进行约束,并建立对应的标量约束目标函数。避免了因标量约束针对性弱导致的方向性偏差。
将式(6)展开得:

对式(8)进行整理,写成标量形式。以x 轴误差模型为例:


y 轴的目标函数 J2( ay)和z 轴的目标函数 J3( az)形式上和x 轴相同。取各轴目标函数的平方和为总目标函数,如式(11)所示:

总目标函数中待优化的变量为9 个,将这9 个变量整理为一个解向量x x=(bxbybzkxkykzθyzθzyθzx)T。为快速、准确地优化非线性目标函数求得解向量x 的全局最优解,本文通过提出自适应权重和引出自适应因子对CS算法进行自适应改进。
2 自适应布谷鸟搜索算法
2.1 布谷鸟搜索算法
布谷鸟搜索(Cuckoo Search, CS)算法是Xin-She Yang 和Suash Deb 在2009 年提出的一种群体优化算法[7]。该算法将布谷鸟的占巢寄生特性和莱维飞行(lévy Flights)结合起来,并通过发现概率调节局部随机游走,从而取得最优解。其中lévy 飞行和随机游走是控制算法全局搜索和局部搜索的关键:
1、lévy 飞行是算法的全局搜索策略,其实质是在解空间内生成满足莱维分布的步长(长短交替的步长)来更新解向量。该策略由两个独立的正态分布构成,生成服从lévy 分布的随机步长r:

其中u~N (0,σ2),v ~N ( 0,1), 标准差参数β 取1.5。该策略的更新公式为:

2、随机游走是算法的局部搜索策略,该策略的更新公式为:

其中i、j、k 表示解向量x 的不同元素(i ≠ j ≠ k),ε 是满足在(0,1)上均匀分布的随机数,Pa表示发现被抛弃或建立新巢的概率(本文取0.25)。
2.2 自适应改进
CS 算法在优化多变量函数时,由于lévy 飞行更新的大步长而具有较强的全局搜索能力,但在算法后期lévy 飞行更新的大步长则会影响局部搜索能力,降低算法收敛速度[10,11]。针对此问题,本文从两个方面对CS 算法进行了自适应改进:(1)通过自适应权重将lévy 飞行和随机游走融合,提高算法局部搜索能力。(2)引入自适应因子调节Pa,在扩大局部搜索能力的同时兼顾算法全局性。通过这两部分的自适应改进,提高算法的收敛速度。
2.2.1 自适应权重
通过设置自适应权重将两种飞行策略融合,提高算法中后期的局部搜索能力。
以lévy 飞行的自适应权重为主进行分析:lévy 飞行生成的步长分布是典型的重尾分布,具有较高的概率出现大步长。考虑到权重的大小影响着算法的全局和局部搜索,自适应权重应在算法中后期抑制大步长的产生,提高局部搜索能力。
若采用线性函数形式调节重尾分布现象,难以平衡算法局部搜索和全局搜索。因此使用非线性形式设置两种策略的权重,在算法前期缓慢地降低lévy 飞行的权重,保证良好的全局搜索能力,中后期快速地降低其权重值,同时增大随机游走的权重,提高局部搜索能力,加快收敛速度,动态地平衡算法的全局性和局部性。lévy 飞行策略的自适应权重 ω1为:


2.2.2 自适应因子δ
发现或建立新巢的概率Pa直接控制着算法局部搜索,但考虑到种群适应性,发现概率Pa应随着种群的进化不断减小。因此引入自适应因子δ使发现概率Pa受算法迭代次数控制。将自适应因子调整后的发现概率 Pa′定义为:

为保持算法的多样性,在算法前期发现概率 Pa′和原算法Pa相当,随着种群的进化,发现概率 Pa′先快速下降再缓慢下降至稳定。自适应因子δ为:


将自适应改进后的CS 算法称为自适应布谷鸟搜索(adaptive cuckoo search, ACS)算法,使用ACS 算法对加速度计进行现场标定的整体流程如图2 所示。

图2 基于ACS 算法的加速度计现场标定Fig. 2 Field calibration of accelerometer based on ACS algorithm
下节通过仿真实验和实测实验,验证ACS 算法的有效性及所提方法的可行性。
3 实验与分析
3.1 仿真实验
随机选取分布在单位球体上的1000 个点,将这些点视为处于不同位置下的重力矢量,即当地重力值。误差参数的设定如表1 所示。

表1 加速度计误差参数设置Tab.1 Accelerometer error parameter setting
将加入误差后的点作为加速度计的测量值点。当地重力值和测量值在空间上的分布如图 3 所示(g=9.8m/s2)。其中三角点“Δ”表示测量值点,星花点“*”表示当地重力值点。

图3 重力值点与测量值点Fig.3 Gravity value points and measured value points
算法的初始参数设置如表2 所示。

表2 ACS 算法初始参数Tab.2 Initial parameters of ACS algorithm
将目标函数式(11)设置为适应度函数,经ACS 算法标定结果如表3 和表4 所示。

表3 误差矩阵1Tab.3 Error matrix 1
从表3 和表4 中可以看出ACS 算法标定的误差参数和设定参数基本一致,准确地标定出了加速度计的误差参数。标定后的加速度如图4 中方块点“□”所示。可以看出标定后数据点和当地重力值点基本重合。

表4 零偏误差1Tab.4 Zero offset error 1

图4 校准前后点的分布Fig.4 Distribution of points before and after calibration
为验证ACS 算法标定加速度计的准确性,将ACS算法、CS 算法和PSO 算法的标定结果进行对比。三种算法采用相同的初始参数设置(表2),且采用相同的适应度函数。表5 和表6 给出了三种算法标定的误差参数。

表5 误差矩阵2Tab.5 Error matrix 2
从表5 和表6 中可以看出CS 算法和ACS 算法都准确地标定出了加速度计的误差参数,PSO 算法由于陷入局部最优情况,导致标定结果与设定值相差较大。
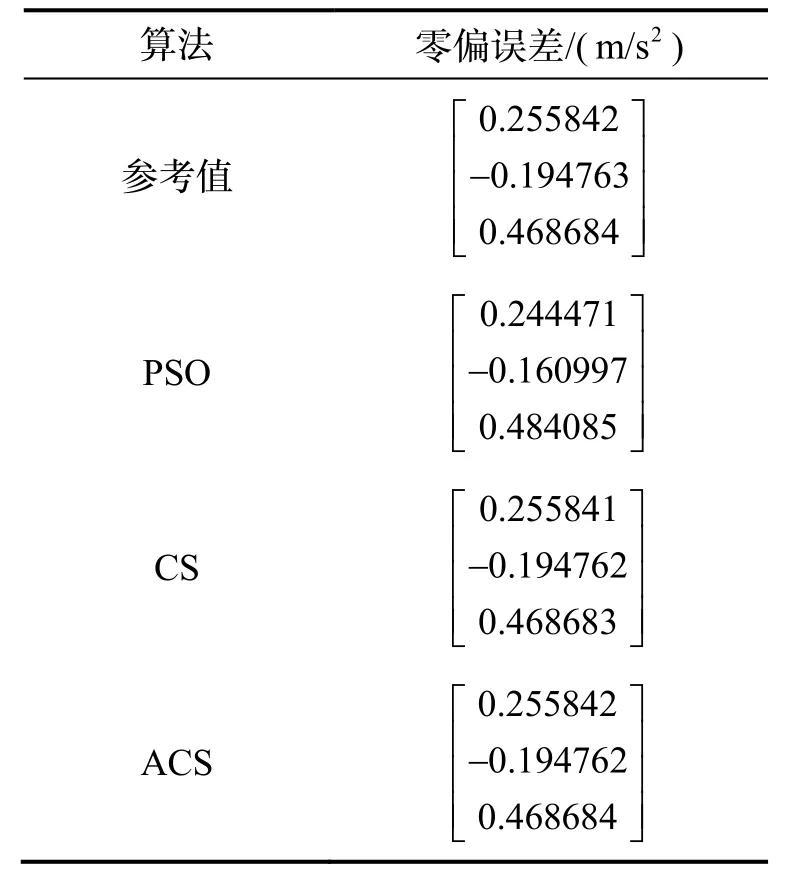
表6 零偏误差2Tab.6 Zero offset error 2
3.2 算法效率对比
为验证对CS 算法自适应改进的有效性,将CS算法和ACS 的初始参数设置一致,比较两种算法的收敛速度和迭代次数。表7 展示了CS 算法和ACS 算法在不同数量数据点下的平均迭代次数。图5(a)和图5(b)分别为1000 个数据点下ACS 算法与CS 算法迭代次数和适应度值的关系图。

表7 改进前后算法平均迭代次数Tab.7 The average iteration times of the algorithm before and after improvement
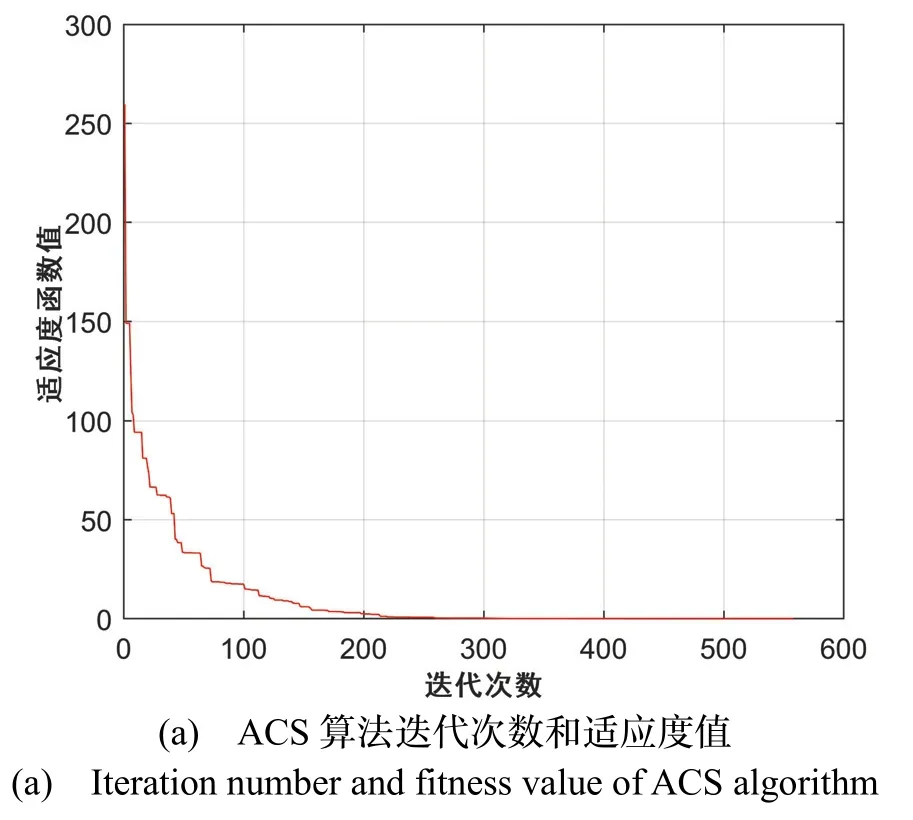
表7 中可以看出ACS 算法的迭代次数有明显的下降。当数据点数为100 时,ACS 算法的平均迭代次数比CS 算法减少了约140 代左右,降低了22%;当数据点数为1000 时,ACS 算法的平均迭代次数下降了约120 代左右,降低了16%。图5(a)和图5(b)的对比可以看出,在相同迭代次数时,ACS 算法的适应度函数值下降得更快。

图5 两种算法的迭代次数和适应度值Fig.5 Iteration number and fitness values of the two algorithms
3.3 实测实验
为进一步评估ACS 算法现场标定方法的有效性,对三轴MEMS 加速度计MPU6050 进行实验验证。
首先将包含加速度计的载体安装在如图6 所示的无磁双轴转台上,在静基座条件下获取不同位置的重力加速度值。

图6 双轴转台和载体传感器Fig. 6 Dual-axis turntable and carrier sensor
通过操作转台,使载体俯仰角按0 °,30 °,60 °,90 °,120 °,150 °,180 °旋转,对应的航向角旋转次数和角间隔为1,0 °;8,45 °;14,25.7143 °;16,22.5 °;14,25.7143 °;8,45 °;1,0 °。将这62 个位置下的加速度计输出值进行存储,使用ACS 算法标定加速度计。将算法标定的误差参数与实验室标定法的误差参数进行对比。实验室标定法[12]的参数如表8所示,ACS 算法标定的参数如表9 所示。

表8 实验室标定结果Tab.8 Laboratory calibration results

表9 ACS 算法标定结果Tab.9 ACS algorithm calibration results
为了衡量两种方法,用式(21)计算标定后的加速度误差,并计算均方根误差(Root-Means-Square Error, RMSE)和标准差(Standard Deviation, SD)。图7 为总误差的对比结果。

其中 ail为真实加速度值,为校准后加速度值,l 为测量样本个数,
从图7 可以看出ACS 算法现场标定法的标定误差在峰值处明显低于实验室标定法的标定误差。表10给出了两种方法的均方根误差和标准差。所提方法相比实验室标定法,均方根误差从0.1103 降低到0.0826,降低了25.11%;标准差从0.0643 降低到0.0487,降低了24.26%。

图7 校准后总误差对比Fig.7 Overall error comparison after calibration

表10 均方根误差和标准差Tab.10 Root mean square error and standard deviation
考虑到现场标定与转台试验测量点的差异性问题,为了验证算法的实用性,采用六面取点进行验证,并与传统六面现场标定法进行对比。六面现场标定法和ACS 算法现场标定法的结果如表11 和表12 所示,校准后加速度误差如图8 所示。

表11 六面标定法结果Tab.11 Results of six-side calibration method

表12 ACS 算法六面标定结果Tab.12 Six-side calibration results of ACS algorithm
从图8 和表11、12 可以看出相比于传统六面法,ACS 标定法的标定精度稳定,校准误差低,且对数据量并不敏感。验证了该方法的实用性。

图8 校准后误差对比Fig.8 Error comparison after calibration
4 结 论
本文为快速、准确地标定加速度计,提出了一种基于ACS 算法的微加速度计现场标定方法。从标量约束的角度构造了目标函数,并对布谷鸟搜索算法进行了自适应改进。实验结果表明,相比传统六面标定法以及实验室标定法,收敛速度更快且标定结果更加精确稳定。后续将继续对MEMS 加速度计的随机误差以及陀螺仪等惯性测量仪器的标定进行深入研究,为惯性导航器件的广泛应用夯实基础。
