光纤陀螺环路增益高精度实时检测与闭环控制方法
2021-10-17张春熹秦雪馨孔令海
张春熹,秦雪馨,郑 月,孔令海
(北京航空航天大学仪器科学与光电工程学院,北京 100191)
光纤陀螺(Fiber Optic Gyroscope, FOG)是一种基于Sagnac 效应的光纤角速度传感器,具有精度覆盖范围广、量程大、寿命长、可靠性高等优点[1],被广泛应用于军用领域和民用领域(如石油、煤矿勘探等)[2]。
数字闭环光纤陀螺的环路一般包含前向通道和反馈通道。在理想闭环条件下,光纤陀螺的标度因数主要取决于反馈通道增益,与前向增益无关[3]。为了保证反馈通道增益的稳定性进而保证标度因数稳定性,光纤陀螺中配置了集成光学调制器半波电压的闭环跟踪环节,即光纤陀螺中的第二闭环[4](光纤陀螺对转速信号的闭环一般称为第一闭环,第二闭环是相对于第一闭环而言)。然而,受到温度、时间退化和电路串扰等因素影响,光纤陀螺的性能实际与前向通道增益稳定性存在相关性[5]。实测数据表明[6],光纤陀螺在工作温度范围内(一般为-40 ℃ ~ +75 ℃),前向增益变化典型值约为20%,反馈通道增益变化典型值约为10%;在长时间工作或贮存条件下,光源性能参数的退化可能造成输出光功率大幅衰减;特别是在人为加入抖动信号抑制光纤陀螺死区时,光纤陀螺检测到的转速中会含有抖动信号对应的伪转速成分,其幅值随前向增益变化而变化,难以进行确定性补偿[7-8]。因此,对前向增益的实时检测与控制是实现抖动信号稳定与准确补偿从而提升光纤陀螺精度的关键技术。此外,陀螺光路或电路的故障一般会表现为前向增益的显著变化;因此,前向增益的实时检测也成为光纤陀螺故障判别的重要手段之一[9,10],对光纤陀螺在温度变化、长期应用等条件下实现自检自标、问题定位具有十分重要的意义。
传统的前向通道增益检测方案一般只关注到达探测器的光功率,其检测通道一般包括低通滤波、A/D转换和数字信号采集处理等环节,存在以下缺陷:(1)需增加检测电路的布线面积和功耗,往往无法满足小型化需求;(2)只针对探测光功率进行采集,忽略了前向增益中模拟电路、数字电路等传递环节。
针对以上问题,本文提出了一种光纤陀螺全环路增益实时检测与闭环控制方法。以光纤陀螺采用的典型四态调制为基础,增加用于全环路增益检测的额外调制信号;在光纤陀螺实现转速跟踪误差解调与半波电压误差解调的同时,实现光纤陀螺环路增益的实时解调;并通过闭环调整新增的可调数字增益环节,将环路增益收敛于预设参考值并保持稳定。此方法普遍适用于温变、振动、长期贮存等环境,在不增加硬件电路、不依赖外部设备的情况下可实现光纤陀螺全环路增益的实时、准确检测。
1 光纤陀螺环路增益理论分析
光纤陀螺闭环工作原理如图1 所示[11],环路主要包含前向通道和反馈通道两个部分。

图1 光纤陀螺闭环工作原理Fig.1 Principle of the closed-loop FOG
图1 中,Δφs为转速引起的Sagnac 相位差;Δφf为闭环反馈相位差,在理想闭环条件下,与待跟踪的Δφs等值反号,闭环误差(Δφs与Δφf之差)Δφe≈0。干涉环节中的P0为干涉光路无任何相位差时到达探测器的光功率,P0的变化表征了光源输出功率变化与光路损耗变化的综合影响。干涉环节中的Δφ表示Sagnac干涉仪中两束光干涉时的总相位差,一般包含转速闭环误差Δφe和用于信号检测的调制相位差Δφm;理想闭环条件下,Δφe<<Δφm,Δφ≈Δφm。调制信号一般为时变量,四态调制下的调制相位差Δφm依次为φ1,φ2,-φ1,-φ2(无2π 误差时,φ1+φ2=2π,φ1<π,φ2>π,如φ1=3π/4,φ2=5π/4)。光电探测部分可等效为比例环节K1,表示从干涉光功率到电压的转换关系;模拟放大部分在通带范围内可用比例系数K2表示;K3、K4分别表示模数(A/D)转换器的转换系数和解调部分的数字增益。因此,光纤陀螺的前向增益可表示为:

其中,sinφ1项为转速解调产生的结果。
反馈通道增益,即数模(D/A)转换器的转换系数、模拟放大驱动电路增益和相位调制器调制系数增益之积,已通过闭环跟踪集成光学调制器半波电压(光纤陀螺第二闭环)来保持稳定[4],因此,环路增益稳定主要针对前向通道增益。
2 环路增益检测与闭环控制方案设计
2.1 环路增益检测方案设计
为实现环路增益稳定控制,首先要对环路增益进行实时准确检测。本文以典型四态调制为基础,向集成光学调制器施加四态调制波形Δφm(t)的同时,加入额外的增益监控信号Δφg(t),如图2 所示。四态调制信号的频率为光纤环的本征频率vk=1/2τ,Δφm(t)中每个状态持续时间为光在光纤环渡越时间τ 的一半。增益监控信号产生的相位差Δφg(t)为一个幅值为φg,频率为vk/2 的方波信号,与四态调制信号时序同步;将增益监控信号一个周期内的8 个τ/2 时间段分别记作sti(i=1,2,3…8)。图2 还给出了Δφm(t)和Δφg(t)二者之和及其与恒定Sagnac 相位差Δφs之和的时序形式。
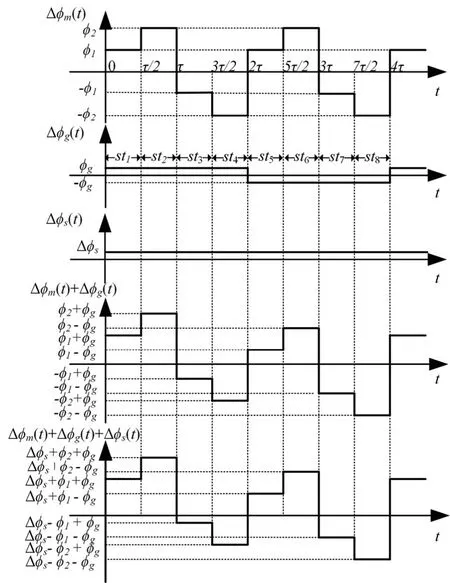
图2 四态调制信号和增益监控信号时序图Fig.2 Waveforms of the four-state modulation signal and the gain-monitoring signal.
此时,对于一个开环工作的光纤陀螺,到达探测器的信号光功率可以表示为:

对应的探测器输出如图3 所示。值得说明的是,光纤陀螺第二闭环可保证Δφm(t)和Δφg(t)幅值的稳定。

图3 反馈通道增益准确时四态调制信号和增益监控信号组合调制下的探测器输出图Fig.3 Detector outputs with the combined modulation of the four-state-modulation and gain-monitoring signals when the feedback-path gain is accurate
探测器信号经过前放后进行数字量化编码,当反馈通道增益无误差时,增益监控信号Δφg(t)一个周期内sti(i=1,2,3…8)各状态下对应的数字量分别为:
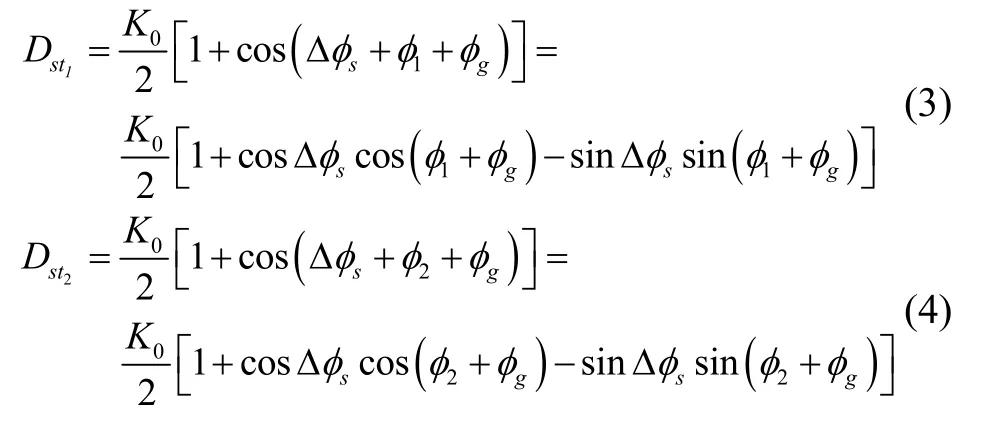
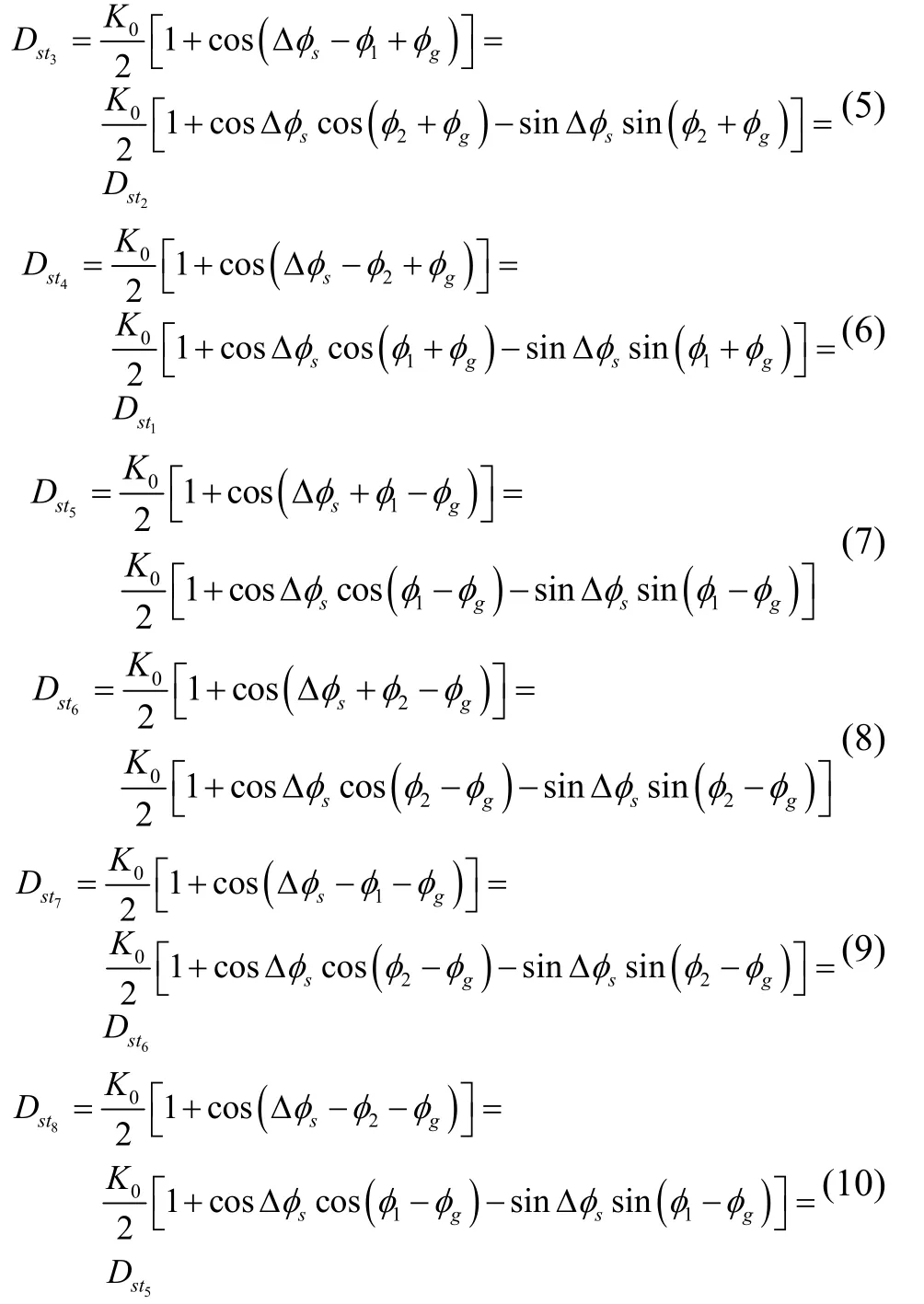
其中,K0= P0·K1·K2·K3·K4,为不包含sinφ1项的前向通道增益。开环下的转速解调结果为:
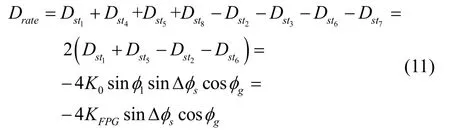
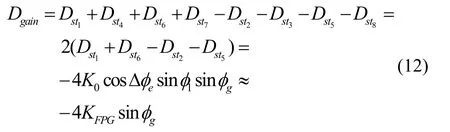
闭环工作时,式(11)中的Δφs被闭环误差Δφe替代,且Δφe≈0。对光纤陀螺前向通道增益的解调计算如式(12)所示。结果包含了前向增益KFPG。
与传统的四态调制相似,利用各状态数字量可得到光纤陀螺的第二闭环误差;通过闭环调整进而实现反馈通道增益的稳定。图4 为第二闭环误差为零与不为零两种情况下探测器输出的波形图,当存在第二闭环跟踪误差,即反馈通道增益不准确时,可将调制相位差幅值表示为aφ1和aφ2(a≠1)。
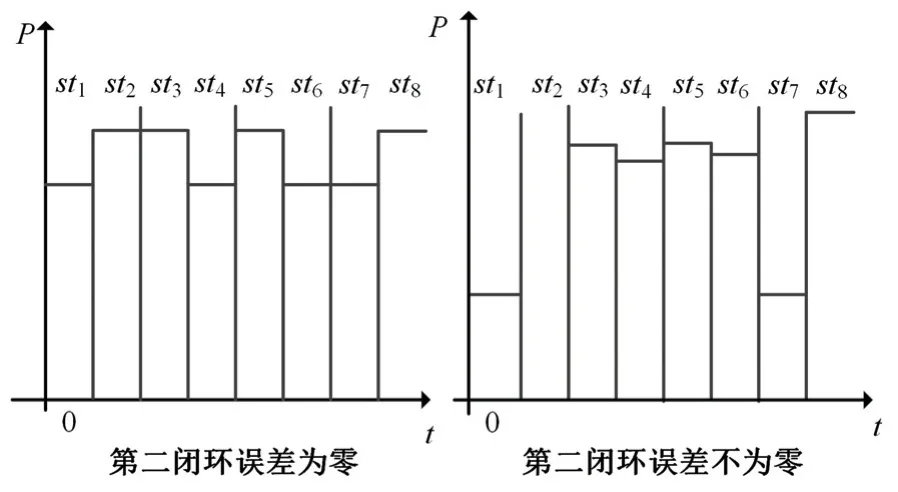
图4 第二闭环误差为零与不为零时探测器输出波形图Fig.4 Detector outputs when the second-closed-loop errors are zero and non-zero, respectively.
第二闭环跟踪误差的解调结果可表示为式(13)。
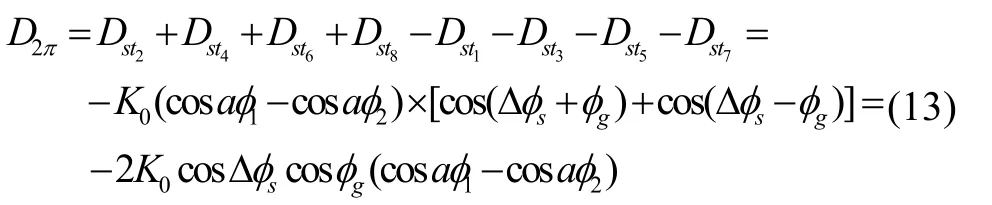
因此,在传统四态调制中增加增益监控信号,通过式(11)(12)(13)可分别实现转速、前向增益和第二闭环误差的解调;其中式(11)和(13)表示的解调方式与传统四态调制无本质区别,式(12)所示的前向增益解调方法是本文关注的重点,也是实现环路增益检测的核心及实现环路增益稳定控制的基础。
2.2 环路增益闭环控制方案设计
传统的光纤陀螺闭环控制回路如图5 中的实线框和实线箭头所示。在2.1 节所述增益检测方案的基础上,增加增益闭环控制回路,如图5 虚线框和虚线箭头所示;此回路主要保证了前向通道增益的稳定,并与第二闭环共同工作保证了整体环路增益的稳定。

图5 增益闭环控制原理框图Fig.5 Diagram of the automatic gain control loop
在增益闭环控制回路中,增益解调为式(12)所示的计算过程,参考增益表示了闭环调整的收敛目标值;增益误差为实际增益解调值与参考增益之差;之后,增益误差通过积分器和滤波器,输出控制可调数字增益Kadj;Kadj为前向通道增益中新增加的一部分。式(11)至(13)所示的转速、增益和第二闭环误差的解调结果分别变为:
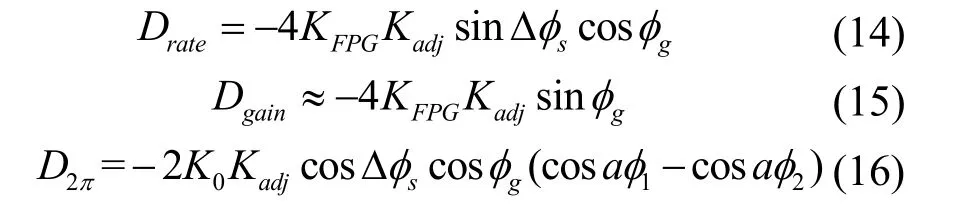
此时,前向通道增益变为KFPG和Kadj的乘积,通过增益闭环自动控制回路,Kadj可实时补偿KFPG的变化,使前向增益稳定保持为参考增益值。
3 实验与讨论
3.1 增益检测效果实验验证
对增益检测效果实验验证采用的光纤陀螺主要参数为光纤环直径约70 mm,光纤长度约900 m,光源输出中心波长约1531 nm。实验条件为测试光纤陀螺不同器件、部件在温变下的损耗(增益)变化。具体实现方法为将待测部分放入温箱,在温变条件下,光路输出信号通过新增的耦合器(50:50,1 分2)一路接入光功率计作为测试基准,另一路接入光电探测器利用本文提出方法进行检测;通过二者对比定量评估此方案增益检测的准确性,如图6 所示。实验测试对象包括光纤陀螺敏感环、光纤陀螺全光路(包含光源、光源耦合器、敏感环)和前置放大电路板。值得说明的是,使用的光功率计测试光学器件和全光路损耗是普遍采用的标准测试方法,但其无法覆盖电路部分测试,这也是传统测试方法的显著缺陷之一。

图6 光纤陀螺增益检测实验装置示意图Fig.6 Diagram of the experimental setup for gain measurements
(1)变温下敏感环损耗变化测试
为定量评估增益检测精度,首先需对本文提出的增益检测方案输出结果进行标定,得到输出数字量与真实输出功率之间的对应关系。实现方法为,在常温下对实验中光纤陀螺的光源驱动电流进行调整,得到不同驱动电流下光路输出的光功率值(光功率计的输出)和增益检测结果(本文提出方法的输出),利用线性拟合得到二者间的线性函数关系。以此为基础,将实验中的增益检测结果转换为光功率值。
将光纤敏感环放入温箱,其他部件置于常温环境,温箱温度在约3500 s 内由-40 °C 升至60 °C 以上,增益检测输出结果和光功率计测量结果通过线性标定函数关系转换到同一坐标系中。由于实验所用光功率计的典型数据记录更新率约为0.1 Hz,增益检测结果的输出更新率为1 Hz;为便于定量比较,将增益检测输出数据进行10 s 平滑(图7 红线)。由图7 可知,平滑后的增益检测输出曲线与光功率计测试结果(图7蓝虚线)变化趋势基本一致。在被测量光功率范围为17.3 μW ~ 18.3 μW 的情况下,增益检测结果相对于光功率计的均方根误差为1.55×10-2μW。
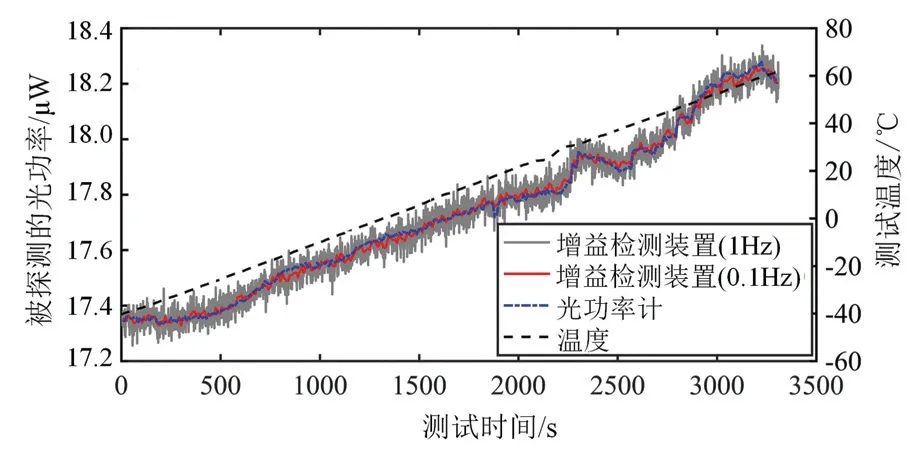
图7 敏感环在变温环境下光路输出光功率测试结果Fig.7 The output power of the optical loop when the sensing coil is under temperature variation.
(2)变温下全光路损耗变化测试
以本节(1)中实验装置为基础,将光纤陀螺光路包含的敏感环、光源及光源耦合器全部放入温箱,新增的用于光功率探测的耦合器、光电探测器和检测电路部分置于常温环境中,分别使用本文提出的增益检测方案和光功率计测试光路在温变下(温变条件同本节(1)部分)光功率的输出变化情况,测试数据处理方法同本节(1)部分。如图8 所示两种方法的结果随温度变化趋势基本一致,在被测量光功率范围为16.7 μW ~ 18.2 μW 的情况下,增益检测结果相对于光功率计的均方根误差为3.18×10-2μW。
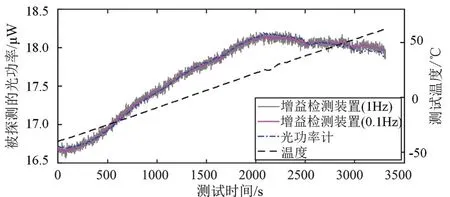
图8 全光路在变温环境下输出光功率测试结果Fig.8 The output power of the optical loop when the whole optical loop is under temperature variation
(3)变温下前置放大电路增益变化测试
将前置放大电路板放入温箱,其他光学部件置于常温环境,使用本文提出方案对前置放大电路在温变下(温变条件同本节(1)、(2)部分)的增益变化测试结果如图9 所示(光功率计测试方案无法覆盖电路部分测试)。可见电路中电子器件的增益随温度升高而呈变大的趋势;温度在-40℃至+60℃范围内,由电路引起的前向增益变化极差约为28%。
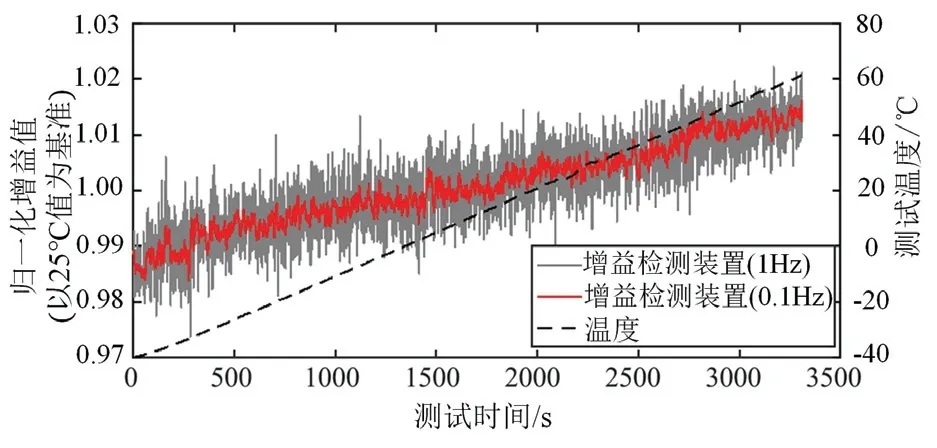
图9 前向通道电路在变温条件下增益变化测试结果Fig.9 The measurements of the gain for the detection circuit in the forward path under temperature variation
3.2 增益闭环控制效果实验验证
下面验证2.2 节提出的增益闭环控制的实际应用效果。将光纤陀螺整体放入温箱内,使用本文提出的增益检测方案分别在增益闭环控制不工作与工作两种条件下对光纤陀螺在-40 ℃至+60 ℃温变环境中的前向增益变化进行测试,测试结果以25 ℃时的增益测量值为基准进行归一化处理。如图10 所示,前向增益变化量由19.8%减小为约0.12%。

图10 增益闭环控制工作与不工作两种情况下前向增益变化测试结果Fig.10 Measurements of the forward path gain when with and without the automatic gain control loop, the results are shown
3.3 讨 论
通过实验验证了本文提出的增益检测和闭环控制方案的正确性和有效性。相比于传统依赖光功率计的测试方案,其显著优势如下:(1)该方案可在温度、振动等特殊应用环境中以及在系统长期贮存、无法拆卸等实际条件下实现,无需增加硬件电路、不依赖外部设备;(2)增益检测装置的更新率及闭环控制速度可人为设定,可根据系统测试需求进行便捷调整;(3)可解决传统增益检测中无法直接、准确、全面衡量电子器件影响的缺陷。
然而,此方案仍存在一定局限性:(1)电路串扰等因素可能导致增益测量出现误差;(2)当实际增益值与设定参考值存在较大偏差时,可能导致闭环控制无法正常工作,因此需设定合理的增益参考值;(3)只能检测整个环路的增益变化,当增益检测结果出现异常时,难以准确分离故障部件。下一步工作需针对以上问题继续开展深入研究。
4 结 论
本文提出了一种光纤陀螺环路增益检测与闭环控制方法。通过在传统四态调制波形的基础上加入增益监控方波,可实现对环路增益的实时解调。光纤陀螺控制回路中包含的转速跟踪误差解调、集成光学调制器半波电压跟踪误差解调和环路增益解调的工作频率点分别在本征频率、二倍本征频率和本征频率一半处,互相之间无影响和串扰。通过实时比较增益解调值与设定参考增益获取增益误差,进一步用于闭环调整环路中新引入的可调数字增益部分,实现全环路增益的稳定保持。通过改变光纤陀螺环路中部件的环境温度实现其损耗或增益的变化,将本文提出的增益检测方案与光功率计测试结果对比,验证了增益检测方案的正确性与可行性;通过对比增益闭环控制不工作与工作两种条件的温变下增益变化检测值,验证了增益闭环控制对稳定环路增益的有效性。
本文提出的增益检测与闭环控制方法可在温度、振动、长期贮存、无法拆卸等实际条件下实现,具有不增加硬件电路、不依赖外部设备等优势,对光纤陀螺的设计和应用具有参考意义。
