超高速高空低动压柔性罩体脱落天地相关性研究
2021-10-15张立坤卢宝刚杨依峰
张立坤, 卢宝刚, 董 超, 吴 乔, 杨依峰
(北京航天长征飞行器研究所, 北京 100076)
引 言
4片柔性罩体由连接绳缝合后套装在飞行器表面, 再入过程中, 在气动热作用下, 小端锁定机构的热熔胶融化、 连接绳断开, 连接绳剩余搭扣在气动力作用下拉开、 罩体从飞行器表面脱落.
柔性罩体脱落过程持续一段时间, 并且4片罩体不对称脱落产生附加气动力, 使得飞行器再入角速度、 再入攻角增加, 造成飞行器过载异常放大、 落点偏差增大.
由于不同再入条件下气动力/热环境差异很大, 柔性罩体的脱落高度以及持续时间相差很大, 脱落高度越高、 持续时间越短, 对飞行器再入姿态影响越小、 造成的落点偏差也越小.
目前地面试验设备能力无法同时模拟再入过程中柔性罩体的力/热环境. 试验中采用熔断装置模拟小端热熔胶的解锁过程.
根据超高速Mach数无关性, 采用部分相似准则, 选取风洞来流动压达到飞行动压, 考核不同再入高度下, 柔性罩体连接绳在气动力作用下的脱开过程, 以及脱落过程对飞行器产生的干扰力. 试验中, 采用多台高速摄像立体记录脱落时间, 图1为试验中使用的多目视觉观测平台, 采用6分量天平动态测量脱落过程的干扰力.
1 地面试验设计
本次试验在中国航天空气动力技术研究院FD-16风洞进行. FD-16风洞是一座暂冲、 吹引式φ1.2 m高超声速风洞, 能够模拟不同动压的飞行条件, 以Ma=5 为例, 来流动压变化范围为 2~36 kPa, 模拟再入高度为70~40 km.
建立均匀流场后, 攻角机构将模型托入流场均匀区; 同步控制器触发熔断装置、 数据采集器、 高速摄影机, 驱动动力支杆达到设计转速. 康铜丝熔断, 在气动力的作用下, 柔性罩体展开脱落, 试验过程如图2所示.
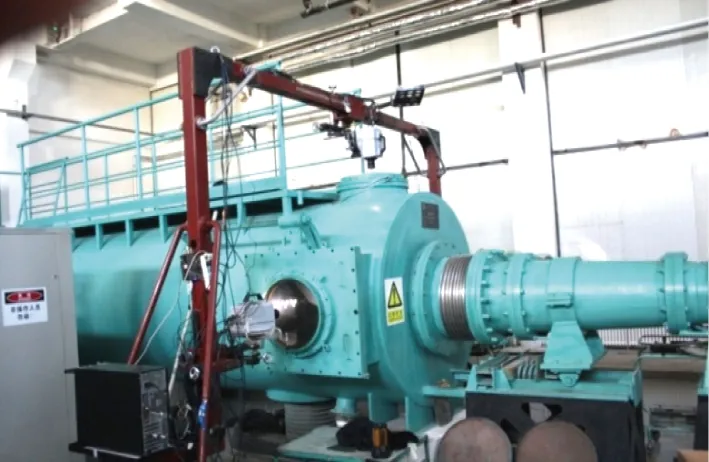
图1 多角度视觉平台Fig. 1 Multi-angle vision platform
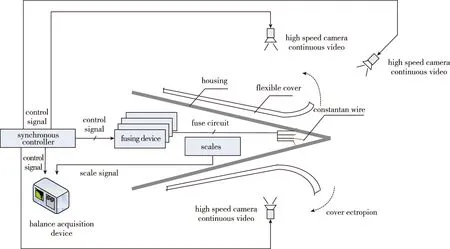
图2 柔性罩体脱落示意图Fig. 2 Schematic diagram of flexible cover falling off
(1)熔断装置
用熔断装置模拟飞行条件下的热熔胶解锁过程. 熔断装置由康铜丝和支座组成, 康铜丝是确保熔断同步性的关键元件, 即要可靠固定又能通电瞬间解锁, 熔断时间的长短由康铜丝直径决定, 此外还要考虑柔性罩体拆装方便、 电路接线绝缘、 熔断产物的烧蚀防护等.
(2)动态采集技术
采用多角度视觉平台、 高速图像采集系统、 图像处理技术等, 立体再现柔性罩体受力变形以及非对称脱落的过程, 验证罩体脱落产生干扰力和干扰力矩的机理, 判读罩体脱落起始与结束时间.
(3)动力支杆技术
飞行器再入过程中绕体轴自转, 采用动力支杆驱动模型旋转[1-3], 模型转速与飞行器转速满足Strouhal数相似律. 动力支杆由伺服电机、 控制系统、 减速器、 滑环引电器和前后支杆构成, 实现飞行器旋转状态下的罩体脱落动态测力, 角位移电位器时时测量调节转速, 真实模拟飞行器再入旋转条件下柔性罩体的脱落过程.
(4)同步控制技术
通过同步器控制[4-6], 同步启动熔断装置、 高速摄影、 数据采集器以及动力支杆, 确保4片罩体分离状态与动态测力、 高速图像一一对应.
试验中发现, 多数情况下4片罩体不会同步脱落, 当一侧连接绳脱开后, 罩体内泄压, 其余几道连接绳扣无法脱开, 罩体连着最后一扣挂在飞行器底端耳片上. 将固定耳片改为挂钩连接形式, 既保证直吹力环境下的可靠连接, 又满足罩体再入过程中的可靠滑开.
2 天地相关性设计
鉴于风洞流场均匀区限制, 试验中柔性罩模型为半罩, 研究表明[7-9]: 当风洞试验模拟实际来流动压, 且柔性罩体材料为真实产品时[10-11], 风洞试验获取的罩体脱落时间与实际脱落时间之比等于参考长度之比, 即飞行器全模脱落时间是风洞试验1∶2缩比模型脱落时间的2倍[12-13].
在模型表面均匀分布n个标记点, 如图3所示, 通过高速摄像判读罩体脱落经过各个标记点的时间历程. 除了第1扣和最后1扣从底部脱落的时间略长, 罩体卷动脱落的过程基本是匀速的, 将半模罩体脱落干扰力的时间间隔放大1倍换算到全模脱落干扰力[14-15].
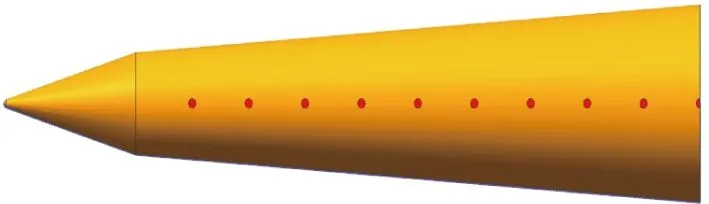
图3 均布标识点示意Fig. 3 Schematic diagram of evenly distributed identification points
选取10次试验子样, 包括5次固定模型和5次旋转模型, 旋转模型比不旋转模型脱落时间短, 且随来流动压增加, 罩体脱落时间变短, 脱落时间与来流动压的关系如图4所示.
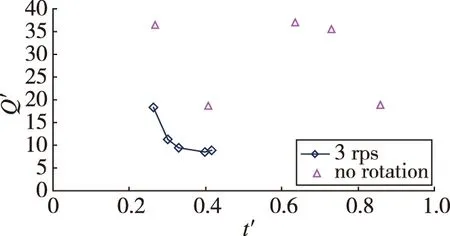
图4 柔性罩体脱落时间与动压相关性Fig. 4 Correlation between falling-off time of flexible cover and dynamic pressure
3 干扰仿真计算
动态测量罩体脱落过程的6分量气动力, 与光弹气动力测量值的差量, 即为脱落过程的干扰力, 图5, 6分别为5次旋转模型柔性罩脱落过程干扰力和干扰力矩随时间的变化曲线. 根据风洞试验来流动压, 将干扰力无量纲化, 叠加到常规气动参数上, 采用刚体动力学模型计算落点, 与理论无干扰弹道落点对比, 得到柔性罩体脱落过程引起的落点偏差.
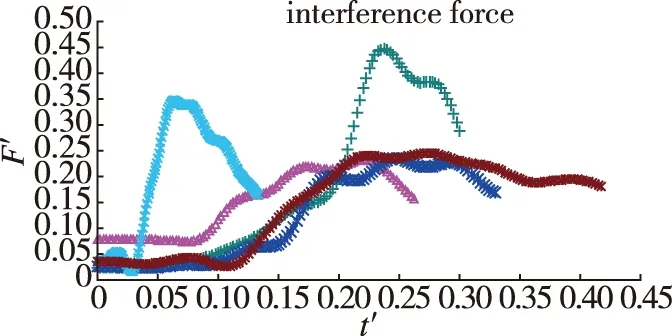
图5 旋转模型干扰力Fig. 5 Interference force of rotation model
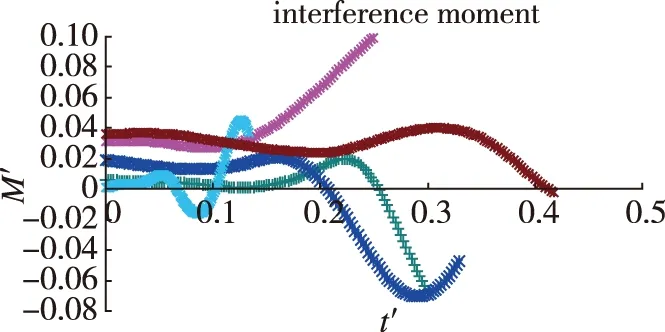
图6 旋转模型干扰力矩Fig. 6 Interference moment of rotation model
采用刚体动力学运动方程计算干扰力、 干扰力矩造成的落点偏差, 仿真计算得到的10个子样, 纵、 横向偏差分布如图7所示.



图7 落点偏差分布Fig. 7 Distribution of landing point deviation
4 结论
柔性罩体脱落是非定常过程, 脱落时间和干扰力与来流动压、 罩体连接绳结构、 罩体Poisson比、 罩体与壳体间摩擦系数等多因素相关. 采用多子样概率统计方法, 可以提高干扰力、 干扰力矩的预示精准度. 本期试验选取不同动压10个子样, 干扰力系数均值为25%, 干扰力矩系数均值为28%.