农业机械导航路径规划研究进展
2021-10-13何永强
周 俊 何永强
(南京农业大学工学院, 南京 210031)
0 引言
20世纪80年代中期以来,传感器与测控技术、通信技术和智能控制技术等先进科学技术的应用,特别是GNSS技术在农业领域的推广应用,共同推动了现代农业生产过程向智能化、信息化、规模化和精细化的方向快速发展[1-2]。欧美、日本等发达国家的现代农业起步较早,现已逐步形成了较为科学、系统的现代农业技术体系。我国农业生产智能化技术起步相对稍晚,但随着全社会生产力的不断提高、劳动力持续向非农业生产门类转移,现阶段也逐渐出现将先进的科学技术成果结合农业应用场景转化为现代农业生产智能化技术,并衍生出一系列适用于我国农业发展的新模式。
农业机械自动导航技术是智能农业装备基础技术之一,主要包括农田环境和农机位姿信息获取、导航路径规划和导航控制等。其中,导航路径规划是实现农机导航跟踪控制的基础,通常以作业成本(如总作业距离、作业时间、能耗等)最低为目标,在预作业区域内为自动导航提供一条较优的无障碍作业路径,合理的导航路径规划可以减少总作业路径[3]、降低多余覆盖率[4]、提升农机的作业效率[5-6]。农业机械导航路径规划是智慧农业实施过程中一项重要的基础支撑技术,在复杂多变的农业环境条件下,不仅可为农机提供精准的导向信息,还有助于提高农机作业质量。而且,结合农艺要求和农业机械性能生成的导航路径可显著提升农业生产方式标准化和规范化,促进智慧农业的高效生产。
本文从全局路径规划和局部路径规划两个角度对国内外导航路径规划技术阐述分析,综述农业机械导航路径规划研究进展,并指出导航路径规划技术未来的研究重点,以期为农业机械智能化发展提供参考。
1 全局路径规划研究进展
全局路径规划是在作业区域环境信息已知的前提下,基于先验完全信息的路径规划方法[7],环境信息包括作业区域和障碍物的位置、形状和大小。根据作业场景的不同,全局路径规划可分为全局覆盖路径规划和全局点到点路径规划两种类型,均是以提高作业质量、降低作业成本为规划目标,寻求较优的作业路径。
1.1 全局覆盖路径规划
1.1.1规则边界地块全覆盖路径规划
规则边界地块全覆盖路径规划通常有两种方法:①基于基准线平移的方法,利用平行于地块边线(一般是较长的一边)的基准线按作业幅宽等间距平移生成多条直线作业路径直至覆盖整个地块,再根据实际作业情况选择合适的地头转弯策略,此方法只需预先测量生成基准线的两点坐标,计算过程简单,但地头转弯处需利用传感器进行地头检测或人工辅助转弯。②采用局部坐标系法,预先测量地块的4个顶点坐标,按照预定作业方式和地头转弯方式计算所有导航路径特征点,再根据作业顺序生成遍历整个地块的完整作业路径,此方法计算过程相对复杂,但生成的导航路径比较完整,作业过程中无需人工干预,常用的全覆盖路径规划策略如图1所示[8-9]。

图1 全覆盖路径规划策略Fig.1 Full coverage path planning strategy
美国伊利诺伊大学RYERSON等[10]将地块栅格化后,利用遗传算法规划覆盖面积最大、总作业长度最短的导航路径。日本的NAGASAKA等[11]通过车载RTK-GPS测量矩形田块4个顶点坐标,利用梭行法进行无人驾驶插秧机作业路径规划。BOCHTIS等[12]综合考虑作业区域几何形状、作业幅宽和最小转弯半径等因素,通过算法自动规划较优的全覆盖路径,非作业距离可减少50%。CONESA-MUOZ等[13]提出了一种混合选择算子用于提高启发式算法的收敛速度,并融合模拟退火算法进行多作业车辆全覆盖路径规划,作业时如有车辆发生故障,可实时调整全局作业路线,由其余车辆完成剩余任务。
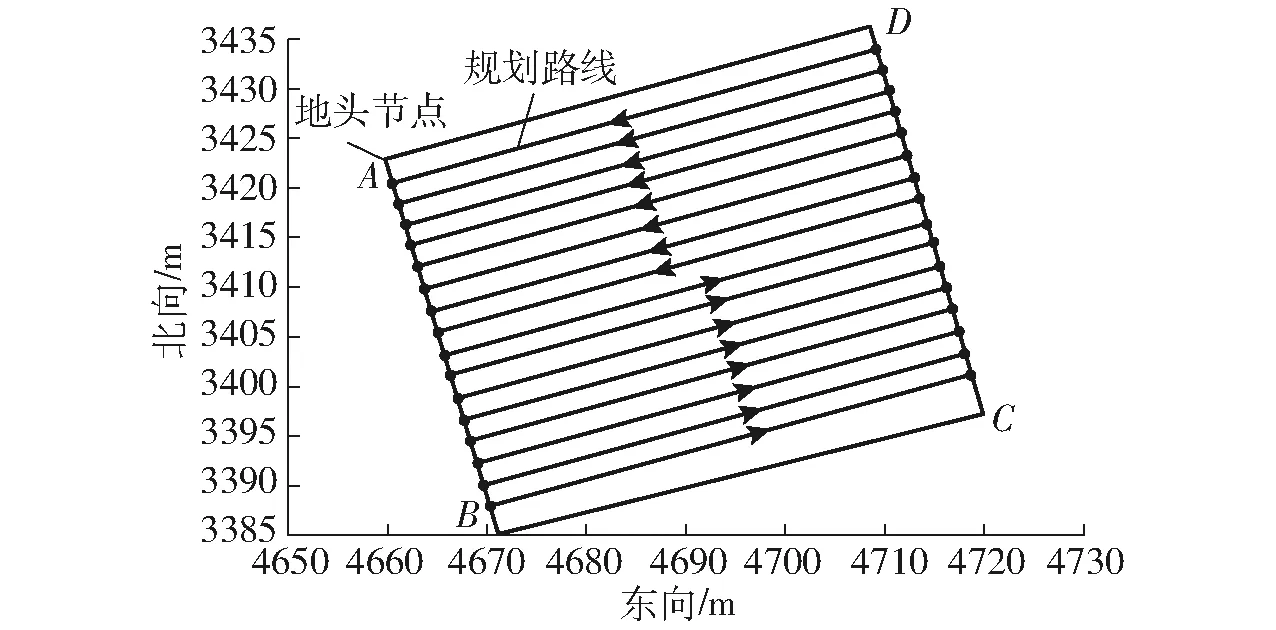
图2 规则边界地块全覆盖路径规划[14]Fig.2 Full coverage path planning of regular field
国内,罗锡文等[14]利用RTK-DGPS采集地块四顶点坐标,根据作业行最大距离和地块形状规划平行作业线,并采用跨行地头转向的方式换行作业(图2)。黎永键等[15-16]通过测量矩形田块顶点坐标规划平行作业线,并根据拖拉机转向半径大小选择跨行转向的掉头方式,利用作业线节点坐标生成作业路径。孙月平等[17]采集河蟹养殖池塘作业区域顶点坐标,计算规划轨迹特征点,生成往复遍历式全覆盖自动投料路径。孟志军等[18]提出一种农机全覆盖作业路径优化方法,可根据转弯数最少、耗能最小、总作业路径最短等目标计算得到作业方向,并生成较优的作业路径。刘刚等[19]以铲车宽度作为正方形栅格边长建立平地作业区域栅格地图,融合K-均值和密度均值聚类栅格单元,根据挖高填低和局部搜索策略进行作业路径规划。芦帅等[8]按照图1a所示5种路径规划方法分别进行了播种试验,发现套行法作业路径最优。李继宇等[20]利用栅格法划分无人机喷施作业区域,规划全覆盖导航路线。陈鹏[21]在园艺电动拖拉机的自主作业中,利用栅格法分别对无障碍规则作业区域、无障碍不规则作业区域和有障碍作业区域实现全覆盖路径规划。
国外约翰迪尔、爱科、凯斯、久保田等农机企业推出了含路径规划、显示和监控功能的农机自动导航系统交互显示终端(图3a、3b),且符合ISO 11783标准,利于信息数据流的监控和利用,广泛应用于拖拉机、播种机、植保机械和收获机等农业机械自动导航作业中。国内农机企业如丰疆、中联重科、沃得、雷沃主要配套第三方如司南导航、联适导航、硕博电子、Trimble等公司提供的交互显示终端产品(图3c、3d)。

图3 农机智能终端典型产品Fig.3 Agricultural machinery intelligent terminal typical products
目前国内农机自动导航系统交互显示终端主要存在功能、界面、数据接口、通信协议非标准化和二次开发困难、成本高等问题,较难推广应用。各农机企业在提升智能农机品质的同时,未来应该重点提高产品标准化,促进农机智能终端在不同种类、不同品牌农机之间的互换应用,进而有助于决策层对农机数据流的监控、整合、分析和决策。
综上所述,目前规则边界地块全覆盖路径规划技术已比较成熟,但存在同一地块重复测量、数据利用率较低的问题,因此建立精准的地块边界位置信息数据库及数据共享平台,智能农机按需自主调用是未来创新发展的一个方向。
1.1.2不规则边界地块全覆盖路径规划
在不规则边界地块全覆盖路径规划过程中,通常会将地块分割成多个容易处理的单元分别进行路径规划,而且在边界转弯处需要特别规划处理,以避免死区对路径规划过程的影响。美国FREITAS等[4]提出一种LKH算法,使植保无人机可以对任意形状地块进行全覆盖路径规划,有效覆盖面积提高了1.54%,作业效率提高了9.54%。日本北海道大学RAHMAN等[22]为了减小联合收获机田间作业损失,提出一种适用于N边形地块的路径规划算法,通过RTK-GPS和IMU传感器精确测量地块边界轮廓点位置,再结合作业幅宽生成作业路径。法国的TUAN[23]通过算法将不规则的作业区域自动分解为多个凸多边形,并结合启发式算法高效完成全覆盖路径规划任务。OKSANEN等[24]对不规则边界地块分割为多个简单地块分别进行全覆盖路径规划(图4)。BOCHTIS等[25]以果园耕地机器人最优覆盖面积为作业目标,对果园行内和行间进行路径规划,与传统作业方法相比总行驶距离减少了2.2%~6.4%。HAMEED等[26]提出一种三维路径规划算法,通过估算多余覆盖面积确定作业方向,有效减少了多余覆盖面积。

图4 不规则边界地块全覆盖路径规划[24]Fig.4 Full coverage path planning of irregular field
国内,徐博等[27]提出一种植保无人机作业航线规划算法,可根据指定的作业方向在不规则作业区域规划耗能较低、耗药较少的全覆盖作业航线,田间试验得到最低多余覆盖率为2.8%。王宇等[28]将高度起伏的作业环境地图栅格化,对建立的三维环境模型进行三维路径规划,并通过引力搜索算法进行返航点寻优,使作业更加精准、高效。郭九霄[29]通过栅格化不规则边界田块,并将边界死区栅格剔除,保证了无人驾驶插秧机导航路径规划的顺利进行。宫金良等[30]以多机协同作业整体效能最大为目标进行任务分配,在此基础上以总遍历面积覆盖率最小为目标,结合改进的遗传算法进行全局覆盖路径规划。
不规则地块边界精准信息的获取和以降低作业成本为导向的路径规划算法开发是当前研究的重点。结合农机转弯特点自适应边界形状规划较优的作业路径,有利于提高农机对作业环境的适应性。
1.1.3多作业区域全覆盖路径规划
多作业区域全覆盖路径规划是对在同一区域内多个分散田块连续作业的路径规划,包括小田块内全覆盖路径规划和田块间作业顺序调度优化两部分,主要用于植保无人机跨地块作业。VALENTE等[31]提出一种基于HS启发式算法的无人机多区域作业路径规划方法,通过减小转弯次数降低作业成本。SANDAMURTHY等[32]针对腰果果园作业区域离散问题,研究了一种全区域遍历路径规划算法,最大面积覆盖率为76%。国内,黄小毛等[33]提出一种适用于多作业区域、复杂边界田块(凸多边形、凹多边形和带孔多边形等)的旋翼无人机作业路径规划算法,利用多边形分组法区分不同形状的地块,结合航线排序和航向优化可快速获得飞行作业轨迹。徐博等[34]利用改进遗传算法优化了多区域间的作业顺序和航线调度策略,实现了植保无人机多作业区域航线规划,增加了作业效率(图5)。

图5 多作业区域全覆盖路径规划[34]Fig.5 Multi area full coverage path planning
随着无人机续航时间的延长和农药有效利用率的提高,多作业区域路径规划可有效增加作业效率、降低作业成本,是未来的发展方向。
1.2 全局点到点路径规划
全局点到点路径规划是在作业区域环境信息已知的前提下,规划从起点到目标点可行的无碰撞路径,在精准作业、农业运输和农机跨地块调度等方面有着非常广泛的应用。目前,比较成熟的算法有A*算法、蚁群优化算法、遗传算法、模拟退火算法和粒子群优化算法等。
1.2.1A*算法
A*算法(A-Star)是一种适用于环境信息已知的“点对点”全局路径规划算法[35-36],根据估价函数搜索最小代价节点,从而确定最优路径,估价函数为
F(n)=G(n)+H(n)
A*算法针对静态作业场景可以有效地规划出最优作业路径[37-38],通过改进优化,其在农业机械导航领域得到了广泛的应用。DUCHO等[39]、HARABOR等[40]通过对比试验发现通过跳点法(JPS)搜索策略改进A*算法,可有效缩短计算时间。AMMAR等[41]针对大规模栅格路径规划问题,通过改进实际代价函数G(n)的计算次数提高算法计算效率。张文等[42]针对温室机器人在复杂作业环境中的路径规划问题,提出一种方向A*算法,通过“视野线”平滑、“圆弧-直线-圆弧”转弯和二叉堆数据存储方法实现了平滑路径、减小碰撞几率和提高算法效率的目的,如图6所示。李云伍等[43]为解决自主行驶转运车在丘陵山区田间道路网行驶路径的规划问题,对A*算法进行改进,采用欧几里得距离作为启发函数,且将路口道路曲率和道路起伏度引入到实际代价函数G(n)中,使算法更加适应丘陵山地道路起伏变化的特征。李靖等[44]利用A*算法对植保无人机在含障碍物作业区域的轨迹进行修正。
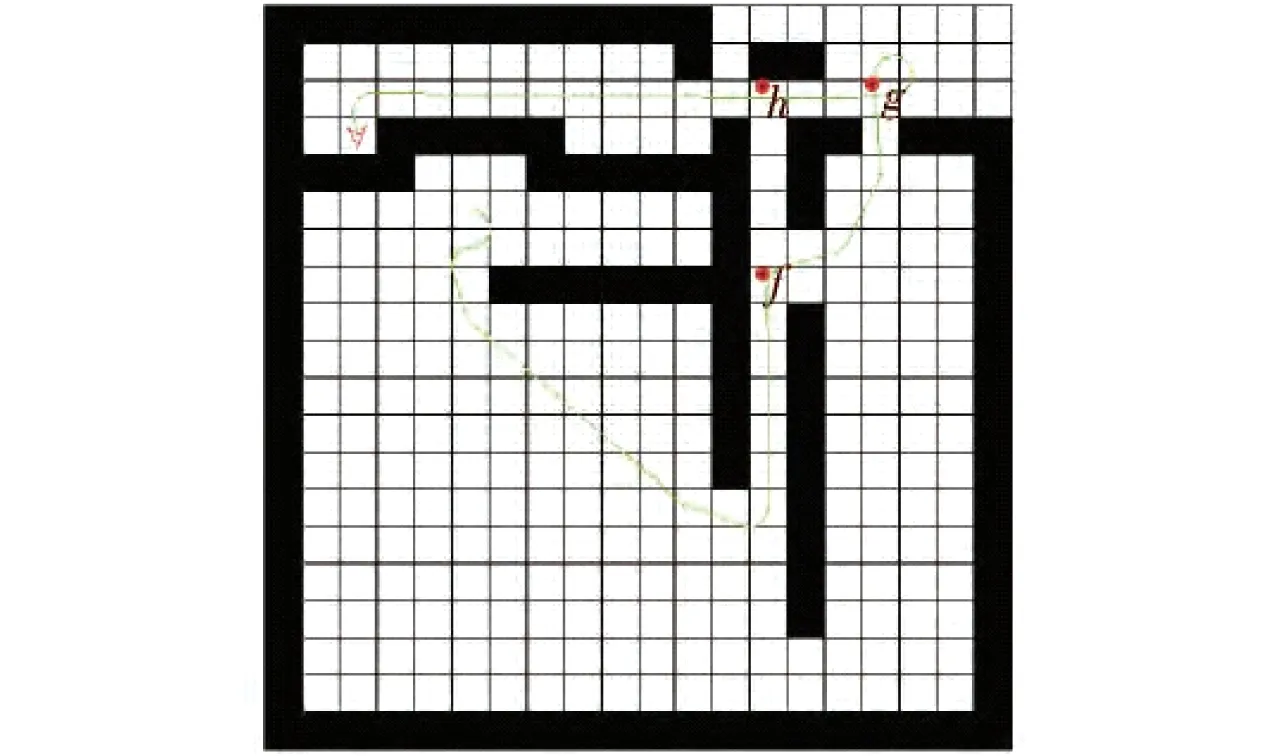
图6 方向A*算法路径规划[42]Fig.6 Directional A* algorithm path planning
当作业场景较大且导航精度要求较高时,创建的地图栅格节点数量巨大,A*算法存在搜索计算耗时较长,占用计算机内存资源较高的缺点,未来可以通过动态调整栅格地图分辨率或利用图像处理技术辅助引导搜索方向,增加路径规划的效率。
1.2.2蚁群优化算法
蚁群优化算法(Ant clony optimization, ACO)[45]通过模拟蚁群成员间信息正反馈交流搜索食物的过程,达到寻求较优路径的目的,搜索能力强且求解性能具有较好的鲁棒性[46-48],但收敛速度慢、容易陷入局部最优,信息素结构优化是目前研究的重点[49-50]。
国内外学者针对不同应用场景对蚁群优化算法进行了深入探究和改进优化。EBADINEZHAD等[51]通过智能选择搜索空间节点和改进信息素矩阵,达到避免局部最优且降低计算时间的目的。LEE等[52]通过将目标点与起始点互换进行二次计算搜索,避免算法陷入局部最优解。国内,曹如月等[53]利用蚁群算法对多机协同作业任务序列进行优化,有效降低了路径代价。张强等[54]通过改进蚁群优化算法中信息素更新策略,根据收敛次数的变化动态调整信息素的更新速度,保证了算法收敛性和搜索速度的统一。王宇等[55]提出了一种基于改进蚁群优化算法的植保无人机路径规划方法,可以对多个作业区域的作业顺序进行合理排序,减少飞行路径总长度。景云鹏等[56]通过改进蚁群优化算法提出一种适用于农田平整作业的三维路径规划方法,适用于农田平整的局部路径规划。黄辰等[57]利用简化A*算法优化蚁群优化算法的初始信息素,以减少初次搜索的盲目性,并通过闭环反馈动态调节参数,提高最优路径搜索能力。刘建华等[58]利用人工势场合力思想优化蚁群优化算法中信息素扩散方向,提高了算法收敛速度。
1.2.3遗传算法
遗传算法(Genetic algorithm,GA)[59]是一种模拟自然生物遗传和进化过程搜索最优解的算法,主要通过交叉、变异、选择3种基本操作算子并行迭代求得优化解,在组合优化、机器学习等方面得到了广泛的应用[60-63]。HAMEED[64]利用遗传算法将按作业幅宽分割好的条形地块进行排序优化,降低了作业重叠区域面积和非工作路径长度。为了降低温室机器人多目标农药喷洒作业成本,MAHMUD等[65]通过虚拟试验对比发现第三代非支配排序遗传算法(NSGA-Ⅲ)较第二代非支配排序遗传算法(NSGA-Ⅱ)的作业路径规划效果更优,如图7所示。禹建丽等[66]利用遗传算法对无人驾驶农用运输车在复杂环境中进行避障路径规划。为使多台联合收割机无冲突高效协同作业,姚竟发等[67]利用改进遗传算法IGA进行路径优化,与传统并排作业相比总作业时间降低了2.4%以上。贾全等[68]在拖拉机自动驾驶系统上线路径规划中,采用遗传算法与量子计算相结合的方法对B样条曲线控制点进行参数优化,有效减小了上线距离。

图7 遗传算法路径规划[65]Fig.7 Genetic algorithm path planning
1.2.4模拟退火算法
模拟退火算法(Simulated annealing,SA)借鉴了固体冷却时内部粒子逐渐变为有序的热力学过程,是一种基于概率近似求解最优化问题的方法,广泛应用于大规模组合优化问题,鲁棒性好且有较强的搜索能力[69-72]。CONESA-MUOZ等[73]利用模拟退火算法进行大田多机协同作业路径优化,有效减小了总作业路径和总作业时间。MIAO等[74]为了提高机器人在动态障碍物环境中的路径实时规划能力,通过改进启发函数选择路径,显著提高了算法在动态路径规划中的性能,仿真结果如图8所示。范叶满等[75]通过模拟退火算法对山地作业环境下的植保无人机进行能耗最优路径规划,负载实时变化的工况下能耗最优路径比常规路径节约能耗32.04%,比最短路径节约能耗11.72%。

图8 动态障碍物环境中SA算法路径规划[74]Fig.8 Path planning of SA algorithm in dynamic obstacle environment
1.2.5粒子群优化算法
粒子群优化算法(Particle swarm optimization,PSO)[76]是一种模拟鸟群觅食过程中综合个体经验和同伴经验动态调整最优搜索策略的过程。由于PSO算法本身对目标函数没有依赖性,计算过程简洁且易实现的特点使其在智能车辆路径寻优与避障及多机群作业路径规划中被广泛使用[77-81]。但传统的PSO算法存在收敛精度低、停滞搜索等问题,后继学者通过自适应调整惯性权重因子和加速因子[82-83]优化算法参数、增加粒子多样性[84]的方式改进PSO算法。
LI等[85]提出一种基于PSO的混合算法,以农业无人机群的调度距离最小为目标,利用变量邻域下降法(VND)加速粒子群优化的收敛速度,用于解决作业过程中多架无人机路径寻优问题。SETHANAN等[78]提出了一种基于多重社会结构的多目标粒子群优化算法(MO-GLNPSO),增加粒子多样性以提高全局及局部搜索能力。LI等[86]以无人机作业飞行时间和安全性能等级为约束目标,利用粒子群优化算法进行路径规划。贾会群等[84]通过自适应调整粒子群算法参数提高算法的搜索能力,利用更新方程对搜索停滞粒子进行扰动,并使其靠近全局最优解。孟庆宽等[87]利用粒子群优化算法求解作物行直线方程参数,进而得到导航路径。
在面对复杂的农田作业环境时,传统粒子群优化算法的缺陷进一步被放大,降低了路径规划的计算效率和可靠性。通过改进型粒子群优化算法或采用多种人工智能算法(模糊神经网络、遗传算法、蚁群算法等)融合[88-91]的方式动态调整惯性权重等参数,提高算法的收敛性和改进算法更新方程是目前研究的重点。
2 局部路径规划研究进展
随着先进传感器技术的发展和信息处理技术的提高,农业机械对外部环境信息的感知能力和解析能力也在逐渐提升。局部路径规划技术的出现使农机作业自主性增强,降低了人工参与度。局部路径规划是在作业区域环境信息部分未知或完全未知的情况下,基于农业机械外部传感器感知作业区域环境信息进行的实时路径规划。由于农业作业环境信息复杂、随机性高[92-93],因此对算法的实时性和鲁棒性有很高的要求。单一传感器较难在复杂农业作业环境中完成既定任务,需通过多传感器融合技术精准感知环境信息,从而提高自主导航的可靠性。目前,农业环境条件下常见的局部路径规划有避障路径规划和局部跟踪路径规划。
2.1 避障路径规划
自主避障是农业机械智能化作业的基本要求,可保障农机装备在复杂农田环境中安全作业[5,94-95]。农业机械通过传感器获取作业环境中障碍物的方位和大小信息,经计算分析后实时动态地规划一条安全无碰撞路径。较为成熟的避障路径规划方法有人工势场法、模糊逻辑法、动态窗口法和几何法。
2.1.1人工势场法
人工势场法(Artificial potential field,APF)由KHATIB[96]在1986年提出,并将其引入到移动机器人避障路径规划领域。人工势场法将环境信息抽象为引力场和斥力场,目标点对移动机器人产生吸引力,障碍物对移动机器人产生排斥力,移动机器人受到的所有斥力和引力的合力决定了其移动方向,算法实时性较好,但容易陷入局部最优解[97-100]。
WANG等[101]通过改进人工势场法的排斥场函数且增加虚拟目标点,提高移动机器人对在含有动态障碍物环境中的避障路径规划能力。ROSTAMI等[102]通过改进引力场函数和和斥力场函数,避免陷入局部最优解,仿真结果如图9所示。张礼帅[103]在果园无人喷雾机的路径规划研究中,利用双目视觉传感器感知工作环境信息,并基于改进的人工势场法在含有动态障碍物的作业环境中实时规划避障路径。王振武[104]通过在无人喷雾机上加装激光传感器来获取作业过程中障碍物的位置信息,利用改进的人工势场法进行局部避障路径规划,并实时更新全局路径信息。彭湘等[105]利用改进势场-蚁群融合算法解决全局路径规划与局部避障的路径规划问题,路径拐点数明显减少。
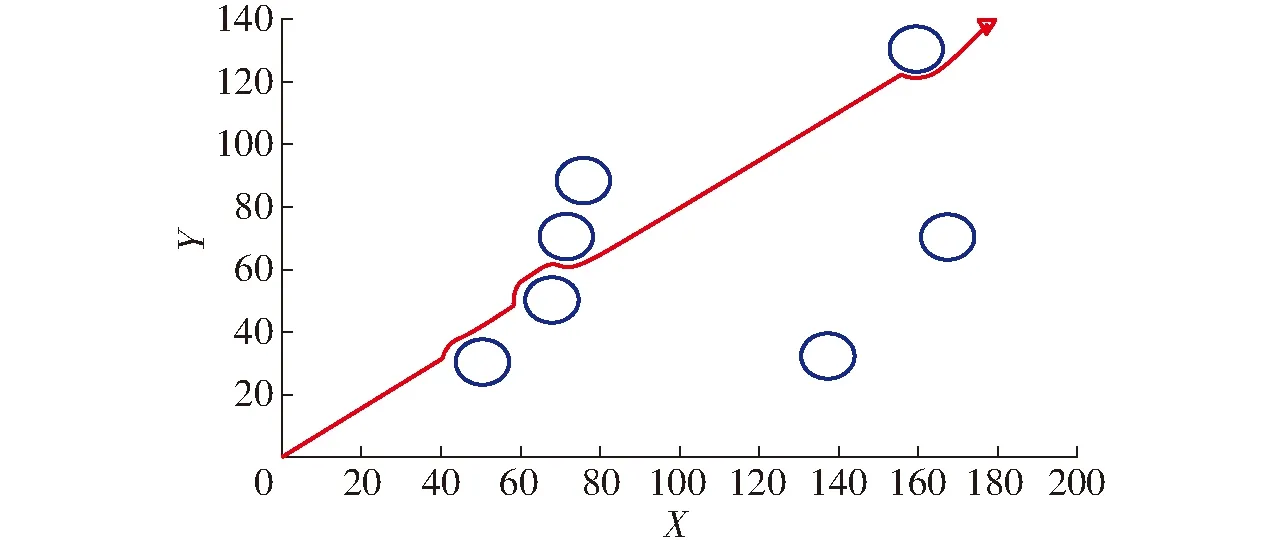
图9 改进人工势场法路径规划[102]Fig.9 APF algorithm path planning
2.1.2模糊逻辑法
模糊逻辑法(Fuzzy logic,FL)是根据专家的知识经验判断制定控制规则,根据推理建立输入和输出关系,并结合传感器感知的环境信息实现机器人实时路径规划的方法,算法实时性和控制效果较好。
ZAVLANGAS等[106]利用移动机器人与障碍物之间的距离和角度建立模糊逻辑规则进行实时路径规划。周俊等[107]利用双目立体视觉传感器获取障碍物相对移动机器人的方向和距离信息,结合模糊逻辑设计了具有学习能力的自主导航移动机器人,可使机器人在未知复杂环境中积累学习经验,自主适应农业环境作业条件。谢守勇等[108]利用红外测距传感器测得的温室移动机器人与障碍物的距离变化量和前进方向与障碍物的角度变化量作为模糊控制器的输入量,以转向角变化量作为输出量,实现移动机器人根据作业环境选择前进方向。郝冬等[109]提出一种将模糊逻辑控制和行为控制相结合,并通过目标导向和避障两个基本行为进行路径规划的策略。郭娜等[110]在传统模糊控制算法规划路径过程中加入了障碍逃脱策略,可使移动机器人走出陷阱区。谢永良等[111]针对轮式AGV循迹受阻问题,利用8路超声波测距传感器检测葡萄园垄道和障碍物,结合模糊逻辑法进行避障轨迹规划。
2.1.3动态窗口法
动态窗口法(Dynamic window approach,DWA)的主要思想是在包含线速度和角速度的速度空间内采样多组速度,在这些速度条件下结合运动学模型计算预测下一时间间隔内的轨迹,再根据制定的评价规则选择最优的行走路径[112-113]。动态窗口法是将位置控制转化为速度控制的方法,有较好的实时避障路径规划能力。
SEDER等在动态窗口法的基础上结合FD*算法,先后在含静态障碍物[114]和含动态障碍物[115]的环境中进行实时路径规划研究,均取得了良好的效果。MOLINOS等[116]提出了两种基于动态窗口法的局部路径规划算法(DW4DO、DW4DOT),对动态障碍物的避障效果显著。劳彩莲等[117]利用超声波传感器检测移动机器人的作业环境信息,通过动态窗口法对局部运动轨迹做出预测,由评价函数从预测的轨迹线簇中选择最优轨迹(图10)。
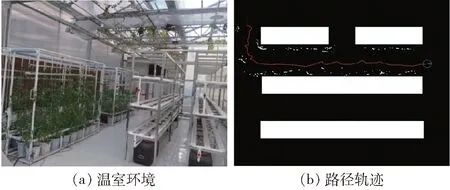
图10 温室环境和路径轨迹[117]Fig.10 Greenhouse environment and path trajectory diagram
2.1.4几何法
几何法是利用传感器获取农机和障碍物的位置信息生成多个无障碍几何曲线段,然后在一定约束条件下按顺序连接形成避障代价最小路径的方法,多用于含静态障碍物的农田作业环境中。
LIU等[118]通过分析直线作业路径上障碍物的位置关系,提出了一种由3个圆弧构成的小障碍物避障方法。吕恩利等[119]基于激光传感器设立障碍物动态识别区,在转弯半径、曲率等约束下采用四次五阶准均匀B样条曲线分段合并生成避障路径。刘宇峰等[120]通过双目视觉传感器定位障碍物位置,结合拖拉机运动学模型规划避障圆弧,并采用分段圆弧连接的方法得到避障代价最小的路径,如图11所示。奚小波等[121]利用三阶Bezier曲线优化法对不连续的最短切线路径优化为连续平滑的避障路径。
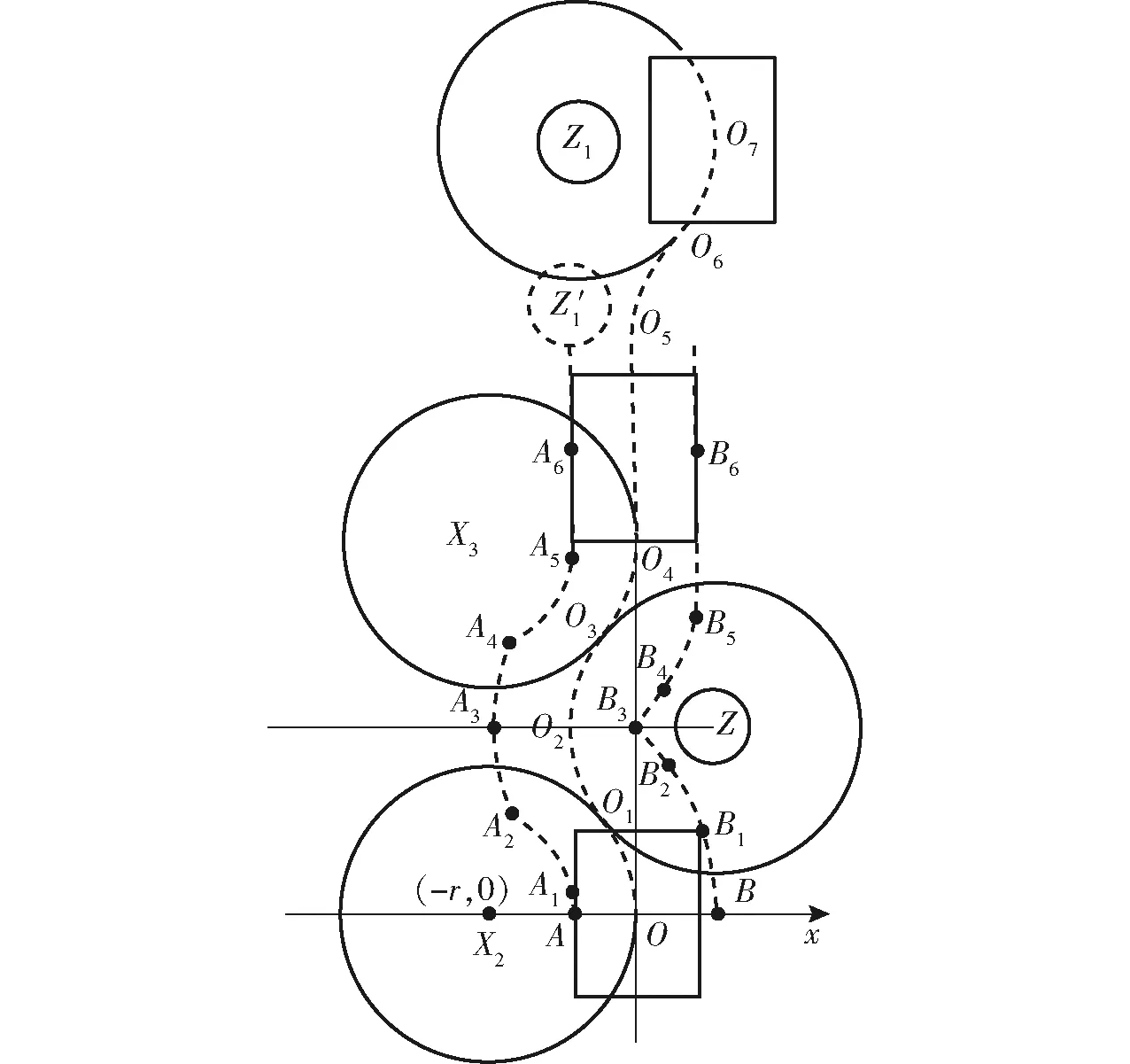
图11 几何法避障路径规划[120]Fig.11 Geometric obstacle avoidance path planning
利用几何法进行避障路径规划简单高效、易实现,难点是农机在运动状态下能够利用传感器精确获取障碍物的位置,并结合自身位姿和运动状态作为初始条件激活避障算法进行避障。未来研究重点应为动态空间位姿解算和运动学模型优化。
2.2 局部跟踪路径规划
局部跟踪路径规划是农机在路径跟踪过程中,从当前位置向预设路径靠近的局部路径规划策略,较大程度上决定了自动导航的跟踪精度。局部跟踪路径规划应用最多的纯追踪模型是一种模拟人工驾驶过程的几何方法,利用计算得到的圆弧连接车体与预瞄点。目前重点研究内容是根据速度、横向偏差和航向偏差动态调整模型前视距离,规划出合适的局部跟踪路径。
魏爽等[122]建立了基于预瞄点搜索的纯追踪模型(图12),适用于直线和曲线预设路径的局部跟踪路径规划。李革等[123]根据插秧机车速和路径弯曲程度调整前视距离,可实时更新车辆与预设路线之间的跟踪路径。王立辉等[124]以联合收获机速度、航向误差和校正后的横向误差设计模糊控制器,动态调整纯追踪模型的前视距离。张华强等[125]利用粒子群优化算法对纯追踪模型的前视距离动态调整。唐小涛等[126]以横向偏差和车速为模糊逻辑控制器输入、前视距离为输出,进而动态调整跟踪路径。

图12 基于预瞄点搜索的纯追踪模型[122]Fig.12 Pure pursuit model based on pre-point search
目前对局部跟踪路径规划方法的研究较少,未来应结合农机自身特性和农田作业环境探究实时性好、可靠性高的局部跟踪路径规划策略,以满足高精度路径跟踪的需求。
3 展望
导航路径规划是实现农机导航跟踪控制的前提,国内外学者结合复杂农业生产环境需要,对导航路径规划开展了较为深入的研究,以降低作业成本为目的,在预作业区域内为自动导航规划较优的无障碍作业路径。全局路径规划技术比较成熟,在精准作业、农业运输和农机跨地块调度等方面有着非常广泛的应用。由于农业作业环境的复杂性和时空变异性,局部路径规划对算法的实时性、高效性、鲁棒性和安全性有着较高的要求,作业环境感知、路径优化和算法改进是目前研究的重点。
未来可从以下方面进行理论创新和技术突破:
(1)数据资源标准化及规划路径共享:现在全局路径规划存在同一地块重复测量规划、数据利用率较低等问题,未来可通过高精度定位系统测绘农田边界信息,建立精确的地理信息数据库、标准化数据接口和通信协议,提高数据资源利用率,促进规划数据共享,增强农业机械按作业环节、农艺要求和机型参数自主规划较优作业路径的能力。
(2)提高环境信息感知和解析能力:局部路径规划对环境信息依赖程度较高,目前主要存在传感器单一、复杂环境中位姿解析能力不足等问题。未来可以利用多传感器融合技术精准获取环境信息,并通过改进优化算法提高对环境的解析能力。
(3)增强实时动态规划性能:目前局部路径规划在应对农业作业环境的复杂性和时空变异性方面尚有不足,与实际生产作业需求还有差距。未来可以通过融合人工智能等算法进一步减少计算时间、提高鲁棒性,增强农业机械实时动态规划性能。
(4)路径规划与农业机械自身特性适当结合:路径规划的主要目标是满足作业任务需求,所以目前农业机械导航路径规划大多只考虑作业幅宽和转弯半径等运动学参数,往往忽视了农业机械自身动力学、控制系统响应等特性差异引起的导航误差。因此未来可以适当结合农业机械自身特性进一步开展研究,增加规划路径对农机的适应性,从而提高导航精度和作业效率。
