面向化工药品的区域运输系统的设计
2021-10-13万欢赵展魏雯贾作文肖烨李超赵雅宁
万欢,赵展,魏雯,贾作文,肖烨,李超,赵雅宁
(苏州工业职业技术学院,江苏苏州,215104)
0 引言
本文提出了一种面向化工药品的区域运输系统的设计,使用意法半导体以Crotex M3内核的32位微控制器作为运输车辆主控制芯片,与32位Tensilica处理内核的ESP8266连接,构成与服务端通信回路。通信方式采用TCP/IP,使运输车辆与服务端能够稳定快速的通信,降低数据传输丢包率,保障化工药品运输的稳定性。员工可通过桌面服务程序指定运输车辆的运输路径,亦或使服务程序自行规划运输路径。使用区域运输系统,进行始末地址自动运送,减少运输过程中人工干预,通过厂区内中控监控运输车辆运输过程以及运输状态,确保运输的安全。
1 系统框图概述
区域运输系统运输化工药品能够有效保障化工厂区内运输系统规范化、合理化,减少人工干预避免化工药品对员工健康产生影响,同样可以减少认为产生的安全隐患,有效保障化工厂区的安全。该系统将运输配送集成化,只需要通过服务系统进行命令控制,就能够完成运输任务。该系统分为AGV车辆系统与服务控制系统两个部分,AGV车辆系统使用ESP8266通过Wi-Fi与服务控制系统进行交互。AGV车辆系统能够采集道路信息,包括从红外传感器与超声波传感器获取的数据,进行计算判断躲避运输道路上的障碍;同时该系统通过控制电机驱动进行控制电机转速,从而控制车辆车辆行驶。服务控制系统主要进行接受AGV车辆的反馈状态,通过路径规划算法进行判断与命令。系统总体框图如图1所示。
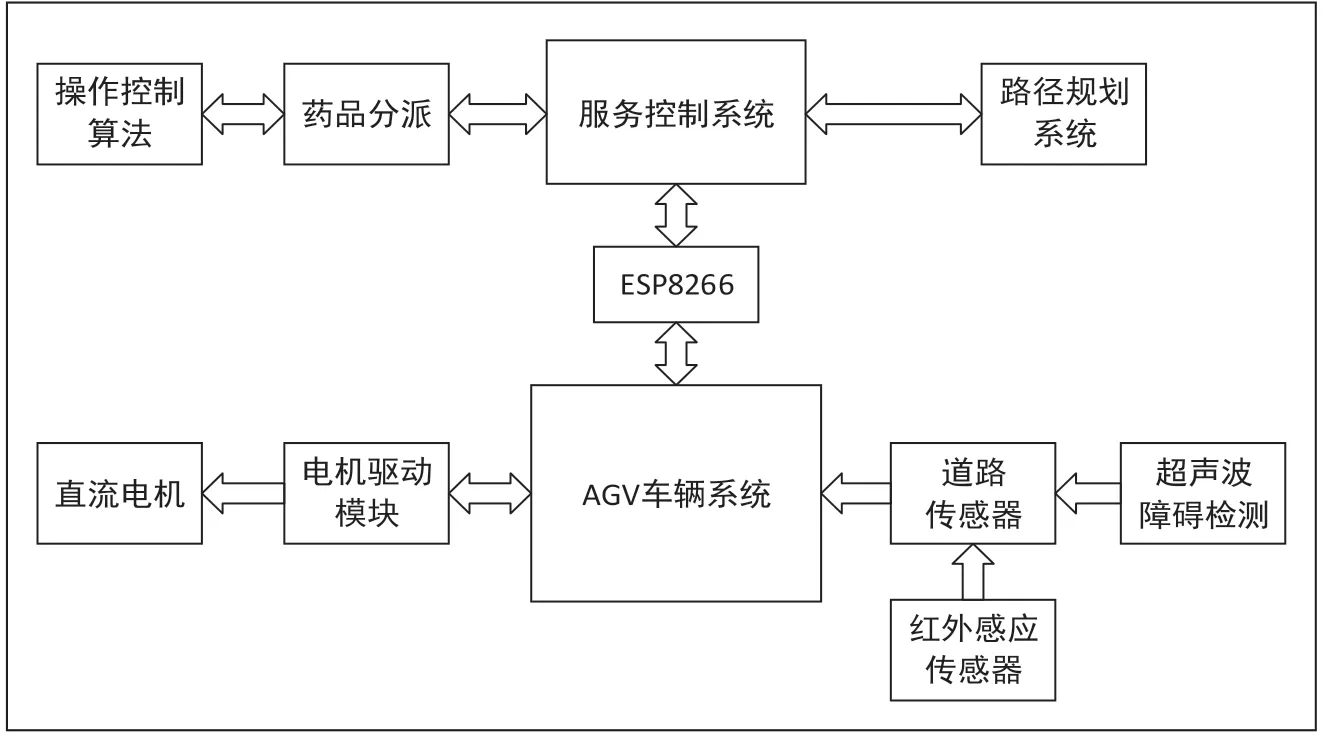
图1 系统总框图
2 硬件电路设计
硬件电路由三个主要部分组成,分别为以STM32为微控制器的AGV控制系统,H桥式电机驱动和基于ESP8266的Wi-Fi通信模块。
该系统通过ESP8266的Wi-Fi通信模块与服务系统进行交互通信,将AGV小车的实时状态信息通过其反馈至服务端,将服务端的命令进行解析传递至AGV控制系统。AGV控制系统通过串口与ESP8266进行数据交互,使用单片机内置PWM控制电机驱动,能够调节电机转动方向速度。H桥电机驱动在驱动直流电机中,能够有足够的功率进行驱动,有效保障AGV运行时车辆的稳定性。
2.1 AGV控制系统设计
AGV控制系统使用基于Cortex-M3内核的32位微控制器芯片STM32F103 RET6,该微控制器通过外部8MHz晶振,通过芯片内部倍频器将主时钟频率提高至72MHz,有效提高对信息处理能力与速度,保证对外输出PWM的稳定性。其内部拥有128KB flash,20KB SRAM,一个高级定时器与三个标准定时器,支持USART、IIC等通信协议[1]。
该控制系统由七个部分组成,分别为电源电路、BOOT电路、复位电路、晶振电路、串口转换电路、按键电路与SWD下载电路。
电源电路由AMS1117线性稳压器件及其外围电路组成,在AMS1117输入端并联一个小电容抑制高频杂波、一个电解电容提高AMS1117供电稳定性,输出端并联一个小电容抑制输出端的高频杂波、电解电容提高AMS1117输出电源的稳定性。输出端并联发光二极管当该供电模块正常稳定供电时发光二极管将正常发光。电源开关采用单刀双掷开关,电源供电端串联上0.5A自恢复保险丝,当控制系统接线错误过流过载能够有效保障系统的安全性。
BOOT电路连接在单片机的BOOT0与BOOT1引脚上,负责配置单片机的启动模式,当BOOT0为低电平则采用主闪存启动模式,当BOOT0为高电平若BOOT1为低电平则从系统存储器启动,若BOOT1为高电平则从内部SRAM启动。
复位电路将复位引脚通过电阻与高电平相连,并与微动开关与地相连,开关两端并联电容,减小按键抖动带来的影响。当按键按下,电容两端短路进行放电,放电结束后复位引脚与地相连,单片机则自动复位。
晶振电路由两个晶振组成,分别是高频晶振与低频晶振,高频晶振通过电容与单片机的外部晶振引脚连接,低频晶振通过电容与单片机的低频晶振引脚连接。
串口转换电路是单片机测试时与计算机连接的重要工具,在该设计中采用CH340N为转换芯片,该芯片无需外部晶振,仅需要外部并联电容。CH430则将单片机端的USART信号转换为USB差分信号。
按键电路负责调试功能,默认状态下GPIO通过两个电阻直接接入低电平,当微动开关按下两个电阻产生分压,GPIO端口处电压升高,起到按键开关的作用。
SWD电路为单片机下载电路,通过连接SWD能够直接对STM32进行调试测试。
硬件电路原理图如图2所示。
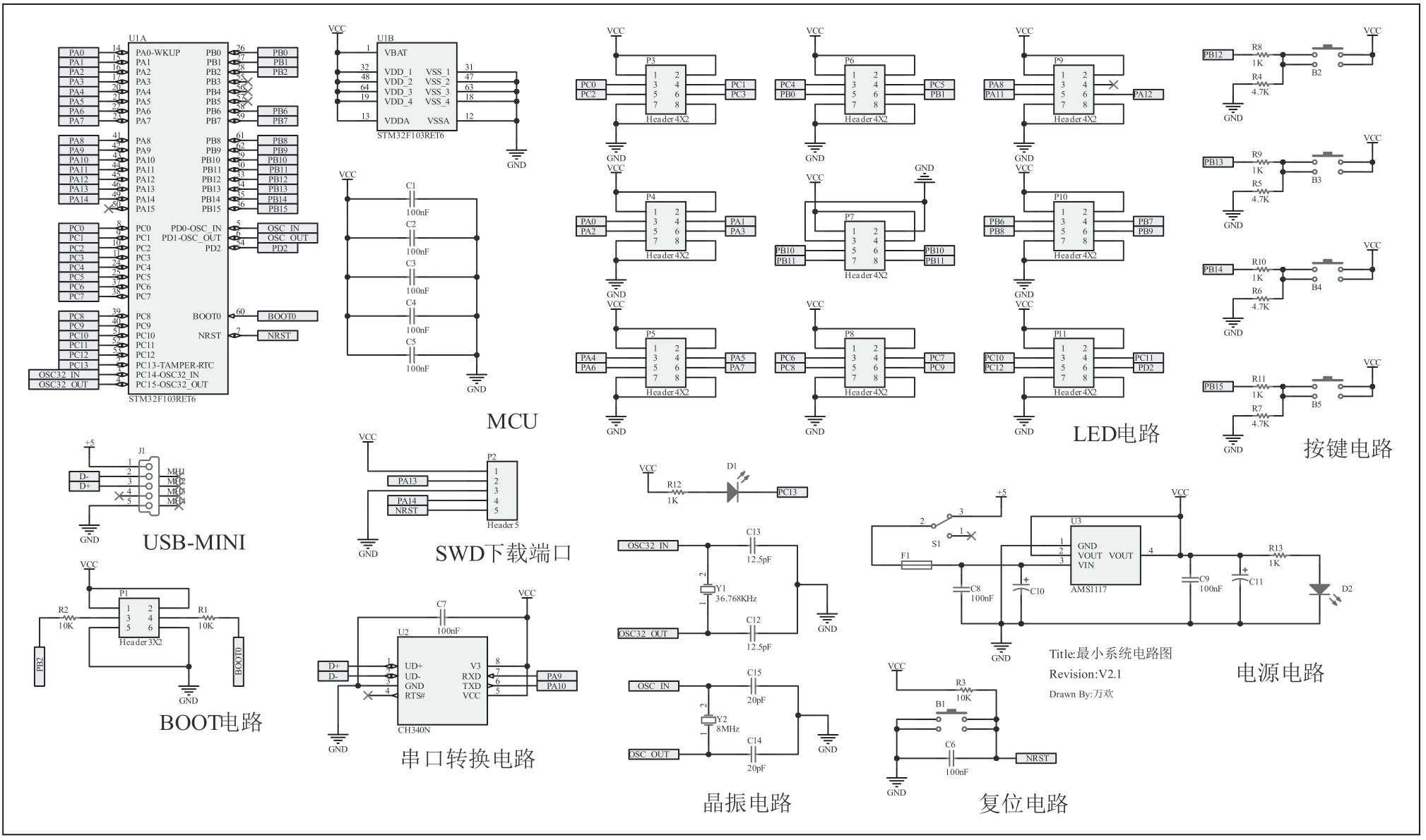
图2 硬件原理图
2.2 电机驱动设计
市面上常见的电机驱动类型一般选用三极管或场效应管作为驱动电路供能原件,三极管能够精确地控制电流从而控制电机的转速,当电机功率较大时三极管自身产生的损耗将大大提升,很可能会烧毁三极管。使用场效应管能够驱动较大功率的电机,将场效应管使用H桥型连接方式通过PWM同样可以精准的控制。
通过场效应管驱动直流电机的电路采用常见的H桥驱动电路,H桥作为一个典型的直流电机驱动控制电路,能够采用集成芯片或者分立元件,由于驱动四个行进电机需要较高的电流需求,所以采用分立元件,防止IC因功率过大烧毁。通过H桥并能够对电机进行多种状态操作,如正转、反转、停止、制动,H桥电路需要对每个桥臂进行精确控制,防止因为同侧同时导通导致MOS管烧毁。通过对两种情况的比较,MOS-H桥型的电机驱动电路能够作为本设计AGV小车电机的驱动电路,通过各样详细参数的比较MOS管更加适配[2]。H桥原理图如图3所示。
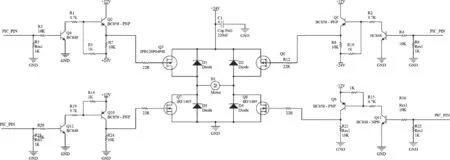
图3 H桥原理图
3 系统服务程序设计
软件服务系统共分为两个部分,分别为通信服务程序与路径规划程序,通信服务程序负责信息传递,将双方的消息进行打包传送,对接收到的数据包进行解包处理。路径规划程序负责将当前运输任务进行规划,从起始点至终点的路径自动规划,减少中间人为干预。
3.1 通信服务程序设计
通信服务程序以TCP通信协议,在通信过程中能够减少丢包概率。通信程序使用C++进行编写,能够有效利用内存,减少CPU的资源浪费。
服务器的建立分为六个步骤,首先需要建立套接字,套接字为通信双方端点的抽象,是连接应用进程与网络协议栈的桥梁,建立套接字后进行绑定端口号,设定监听模式等待客户端连接,同时开辟新线程向客户端发送数据。
在等待客户端连接的时候需要将每个客户端的信息单独进行处理,将每个客户端的用户信息存入容器中,当需要使用时使用迭代器进行索引。每个客户端的信息传入路径规划方法中,进行路径规划,规划结束则将路径反馈给客户端。
在多线程处理中,将两线程需要同时处理的数据进行加锁,当不对数据加锁时,被访问数据被多个线程同时访问造成单一数据多次处理,使被处理数据结果处理异常。当加上数据锁后,多个线程依次获取访问权限进行处理避免数据处理异常,保证服务程序的稳定运行。通信处理中减少容器的使用能够避免内存快速膨胀,当开辟后使用结束的容器需要及时释放避免内存浪费,避免因内存异常产生不必要的损失。通信部分设计框图如图4所示。

图4 通信部分设计框图
3.2 路径规划程序设计
AGV小车主要用于许多工业和军事应用。路径规划的研究是AGV小车研究中最重要的方面之一。AGV小车的路径规划需要在满足特定优化条件的同时,通过环境找到一条无碰撞路径,从指定的起始位置到期望的(目标)目标位置。现有的路径规划方法,如可见性图、势场和单元分解等图形方法,都是为存在静止障碍物的静态环境设计的。在海洋科学研究、工业机器人和军事作战应用等实际系统中,机器人通常面临同时存在移动和静止障碍物的动态环境。该项目提出了一种基于启发式的方法来有效地搜索可行的初始路径。然后将基于启发式的方法结合到基于模拟退火算法的动态机器人路径规划方法中。因此,解决方案的质量以规划路径的长度为特征,并且在运行时和离线路径规划的基于模拟退火的方法中使用组合启发式方法来提高解决方案的质量[3]。
4 结束语
本设计基于一种面向化工药品的区域运输系统。系统采用意法半导体推出的基于CM3核心的微控制器STM32F103芯片作为主控,电机驱动采用H桥电路,设计中使用双路的直流电机驱动,该驱动最大承受功率达到160W,能够使用市场上多数直流电机。另外,采用光耦电路避免因驱动电路损坏单片机,针对欠压与过流能够及时切断保护。通信服务程序负责信息传递,将双方的消息进行打包传送,对接收到的数据包进行解包处理。路径规划程序负责将当前运输任务进行规划,从起始点至终点的路径自动规划,减少中间人为干预[4]。
系统具有工作状态稳定、操作方式便捷等特点,在化工药品运输中能够承载高并发情况,满足区域型的非接触式化工药品输送需求。同时,期望在“智能制造”背景下为进一步实现智慧工厂奠定坚实的基础,为化工领域从业人员提供有安全保障的工作环境。
