机载LiDAR高压线塔点云自动化提取
2021-10-12谭弘武王敬茹刘武能刘丽龙习晓环
谭弘武,王敬茹,刘武能,刘丽龙,习晓环
(1.北京煜邦电力技术股份有限公司,北京 100029;2.中国科学院空天信息创新研究院 数字地球重点实验室,北京 100094;3.云南电网有限责任公司迪庆供电局,云南 迪庆 674400)
0 引言
机载激光雷达(light detection and ranging,LiDAR)可直接快速获取高压输电线路高密度、高精度三维空间信息[1-2],为高压线塔空间定位和三维建模提供可靠的数据源[1],也为输电线路资产数字化管理和安全巡检提供强有力的技术支撑[4-6]。
从机载LiDAR数据快速、精确提取高压线塔点云是其三维数字化重建的基础。早期输电线路地物点云分类研究更多关注电力线点云的快速高精度提取和三维数字重建[7-8],目的是为线路安全、增容分析、大风覆冰等预警模拟提供支撑[9-12]。近年来,随着无人机和激光雷达系统性能的飞速提升,机载LiDAR飞行方式灵活多变、作业水平显著提高,能够获取高压线塔高密度、高精度的完整三维信息,关于高压线塔点云提取、数字化重建等方面的研究也逐渐增多。彭向阳等[13]根据输电杆塔在激光点云中具有高密度、大坡度、大高差特征,提出了一种基于二维格网多维特征分析的输电杆塔自动定位方法;Li等[14]对点云滤波后包含的电力线点、电塔点和少量的噪点(地面点、植被点等)作垂直投影,根据投影后的点云密度和高程变化来确定杆塔点云及其位置。然而以上两种方法只能定位杆塔,无法实现杆塔的自动精细化提取。为从输电线路点云中提取完整的杆塔点云,韩文军等[15]通过计算电力线连接点的位置,生成三维立方体外包来提取杆塔数据点;虢韬等[16]将点云投影到水平面上并进行格网化,采用区域增长算法聚类包含杆塔的网格数据,利用一定高度上的电塔点云垂直投影的面积、电塔塔头长度阈值等过滤掉不符合要求的数据,得到独立的电塔点云。但以上两种方法只能粗提取杆塔,提取结果仍包含植被和电力线等杂点,需人工进一步剔除。
本文充分分析高压线塔空间拓扑特性与点云几何分布特征,提出适用于多种类型的高压线塔点云自动化精确提取算法,并用实验验证该算法的有效性和精度。
1 方法
1.1 高压线塔点云数据粗提取
首先,基于输电线路点云数据和高压线塔中心位置,采用Kd树距离分割法将杆塔点云从输电线路点云中分离;然后,利用欧氏聚类算法剔除杆塔点云周围噪声;最后,基于移动曲面拟合算法[17]和空间格网区域向下生长算法剔除杆塔底部地面点及其周围杂点。流程如图1所示。

图1 线塔点云数据粗提取流程图
1.2 高压线塔点云数据精提取算法
根据高压线塔空间结构特征将其分为塔头和塔身两部分。首先,通过分析线塔长宽比例-高度直方图识别塔头和塔身的关键分割位置;其次,基于空间格网区域向上生长算法去除塔头周围的电力线与绝缘子串等点云,得到塔头点云;然后,利用RANSAC直线拟合算法剔除塔身周围植被点云,得到塔身点云;最后,整合塔头塔身即得到线塔点云。流程如图2所示。

图2 线塔点云精提取流程图
1)关键分隔位置识别。通过线塔点云重定向和垂直分层,绘制线塔的长宽比例-高度直方图,并基于其空间几何特征在直方图中识别关键分割位置。
线塔点云在水平面上常表现为任意方向,为便于后续操作,将其沿Z轴旋转一定角度θ。由于线塔水平方向取决于塔头,可将塔头点云投影至XY平面并均匀采样,然后利用主成分分析(principal component analysis,PCA)求解点云的特征值和特征向量,将最小特征值对应的向量V(v1,v2)记为X′轴,利用式(1)计算旋转角度θ和旋转后的点坐标(x′p,y′p)。
(1)
沿Z轴将线塔点云垂直分为等间隔的若干层,每层为一个包围盒。从图3可看出,塔头投影形状近似为矩形,塔身投影近似为正方形。为避免塔底植被的影响,设定高程阈值T,依次向上计算每层包围盒在水平面投影的长度Δx与宽度Δy之比ratio,绘制线塔长宽比例-高度直方图(图4)。若ratio大于比例阈值则计算停止,并将该层记为线塔的关键分隔位置。该位置以上的点云标记为塔头点云,以下的点云为塔身点云。通过后续操作,分别对塔头和塔身点云数据进行精细化提取。

图3 高压线塔投影
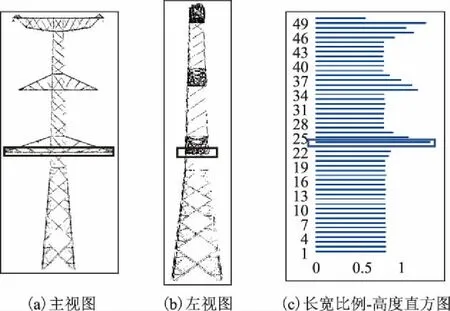
图4 高压线塔投影及长宽比例-高度直方图
2)塔身点云提取。塔身包括四条主要棱线,通过拟合棱线来提取其内部的塔身点云,该过程分为两步。一是提取每层长方体包围盒底面的四个顶点;二是将每条棱线上的顶点拟合为直线,并提取四条棱线构成的塔身框架内部点云。
首先,用凸包算法构建每层包围盒轮廓多边形;然后,利用管道算法简化轮廓多边形以检测角点,根据角点相对于最小包围矩形中心的方向将其分割为四个子集,每个子集可以近似地描述为三维直线[18],利用RANSAC拟合塔身的四条棱线即可形成塔身的框架。遍历线塔关键分隔位置以下点云,若数据点在框架内部,则记为塔身点,否则记为杂点并予以剔除。如图5所示,图5(a)为经RANSAC算法拟合得到的空间直线点;图5(b)为精提取塔身点云数据。
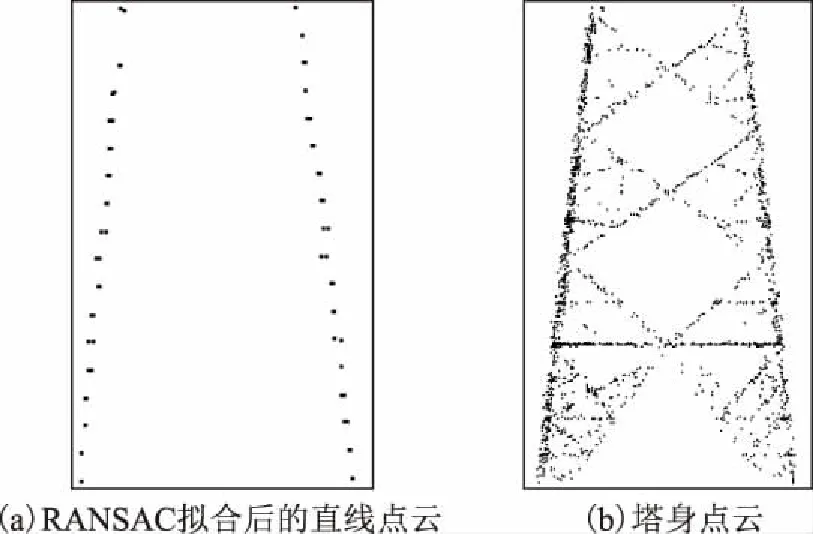
图5 高压线塔塔身棱线拟合示意图
2 实验结果与分析
实验数据为2019年9月利用Riegl VUX1无人机LiDAR系统采集,地点为国网广西段某超高压输电通道,长度为52 km,包含118个线塔,平均点密度为每190 点/m2。表1为激光雷达系统与飞行作业的具体参数。

表1 数据详细信息
2.1 实验结果
选取研究区域内T型塔、门型塔与O型塔三种典型塔形进行实验,主要参数设置包括分割半径15 m、格网尺寸1 m×1 m×1 m、垂直分层间隔1 m。图6(a)、图6(b)和图6(c)分别为T型、门型和O型塔点云提取过程。其中,①为原始点云;②为利用移动曲面拟合算法进行底部滤波后的点云,该方法能够很好剔除地面点,并将线塔底部点与周围植被点分离,避免后续区域生长时将植被点生长到线塔点云中;③为经过空间格网区域向下生长的线塔点云,可有效分离线塔与周围植被点;④为经过空间格网区域向上生长的线塔点云,剔除了塔头的电力线和绝缘子串等非高压线塔点;⑤为经过RANSAC直线拟合后的线塔点云,剔除了与线塔塔身相连的植被点;⑥为塔头和塔身整合后的线塔点云。

图6 高压线塔提取过程示意图
2.2 定量分析
通过比较线塔点云数据的特征(线塔相对高度H)、粗提取的线塔点云数目N、经过人工分类得到的线塔点云数目N人、本文自动提取算法得到的线塔点云数目N塔、除塔自身点以外的其他地物点数目N非塔和算法效率等指标评价本文算法的性能。同时为对比不同密度点云数据的应用效果,选取了另一段线路的T型塔(记为T型塔2)进行对比分析,将之前线路的T型塔记为T型塔1,对比结果如表2所示。总体来说,本文方法提取的线塔点云正确率达到了95%以上,平均每个塔提取时间约2 s,完全满足长距离输电线路线塔快速提取的应用需求。

表2 高压线塔点云数据实验结果
2.3 高压线塔提取结果比较
与文献[19]高压线塔提取结果对比,文献[13]提出的方法能从输电线路中提取出高压线塔点云数据,但仍存在以下问题:①提取高压线塔主干部分点云时,直接利用经验值判断高压线塔主干区位置,即将高压线塔下方5 m以及上方5 m之间的点直接判定为主干部分点云(如图7(a)阴影所示),但这种方法对于塔头与塔身之比较大或所处地形起伏较大的高压线塔(图7)而言,该范围并不是线塔主干区域,因此这种方法具有一定的局限性。②求取每层高压线塔宽度与其高度之间线性关系的操作,仅适用于塔身周围没有植被干扰的情况;一旦塔身周围有植被干扰,则在求高压线塔宽度时易把植被点云当做高压线塔塔身点云进行计算,极大地影响计算结果(图7(b))。③没有去除高压线塔上部电力线、电力悬线及绝缘子串等非高压线塔点云数据(图7(c))。

图7 多因素干扰的高压线塔提取
综上,本文提出的高压线塔自动化提取方法能够有效避免预设经验值和高压线塔周围植被对提取结果的影响,并可剔除线塔塔头电力线点云数据,得到精细化提取结果。
3 结束语
本文提出了一种高压线塔自动精细化提取方法,并通过实验验证了算法的精度与适用性,为后续线塔三维数字重建及输电线路数字化管理等提供重要的基础数据。不足之处在于,使用空间格网区域向上生长算法剔除电力线点云时,当电力线高度与高压线塔横担高度相等时,易将该部分电力线点云误判为高压线塔点云。此外,复杂地形区域的塔脚内部噪声点剔除效果不佳,需进一步分析塔脚分界面与线塔结构之间的关系,建立约束条件来剔除。在后续研究中仍需对线塔细节部分的提取进行优化,如顾及局部点云结构特征等,进一步提高算法的准确度与稳定性。
